Поэтому для той же цели использовался альтернативный, более простой алгоритм. Пусть M(r) есть распределение вероятности расстояний между локальными минимумами яркости вдоль горизонтальной строки изображения. Таким образом M(r) описывает распределение деталей изображения по размерам. На больших шкалах эту функцию можно аппроксимировать степенной функцией, характерной для фракталов:
![]() (1)
(1)
Поскольку искусственные объекты имеют некий характерный размер, их присутствие должно увеличить среднеквадратичное отклонение M(r) от степенного закона, выражаемого линейной регрессией:
![]() (2)
(2)
где C является константой. Согласно эмпирическим результатам, M(r) у HIRES-изображений может быть аппроксимировано степенной функцией при r > 4 пикселов. Регрессия вычисляется при 4 < r < 31 пиксель (т.е. в диапазоне размеров от 50 до 900 м).
Изображение разбивается на K=12 квадратов по 96x96 пикселов каждый. В каждой такой области методом наименьших квадратов вычисляется наилучшие параметры степенной функции, и находится среднеквадратичное отклонение от нее:
![]() (3)
(3)
где k - номер квадрата изображения; gk - множитель, компенсирующий вариации чувствительности сенсора в различных частях изображения; N - число размеров (шкал). Средняя дисперсия оценивается по этим региональным среднеквадратичным отклонениям.
Анализ 733 HIRES-изображений, полученных через светофильтр на 0.75 микрона с орбит 112-115 (от полюсов вплоть до широт 75 градусов), показал что региональные среднеквадратичные отклонения распределяются по закону Гаусса. Согласно критерию Стьюдента для K=12 оценок, если в каком-либо квадрате выполняется неравенство
 (4)
(4)
эту область можно считать статистически аномальной с вероятностью 0,95.
4.2 Прямоугольный тест
Прямоугольный тест выявляет прямоугольные узоры на лунной поверхности. При этом для каждого пиксела изображения выбирается "пробный" пиксел, смещенный на 6 пикселов в направлении заданном позиционным углом. Пусть N есть полное число пар пикселов, а n - число пар, в которых яркости пикселов равны. Функция
![]() (7)
(7)
описывает анизотропию изображения, характеризуемую позиционным углом смещения. Для компенсации искажений, вносимых камерой и компрессией файла, при каждом значении позиционного угла эта функция делится на ее калибровочное значение, полученное усреднением по множеству изображений. Скорректированная функция сглаживается, и находятся позиционные углы, соответствующие максимумам функции. Эти углы описывают ориентацию разных групп линейных деталей. Если имеется различие выявленных направлений на 90 + 10 градусов, то изображение считается интересным.[15]
4.3 Алгоритм СХЕМА
Алгоритм СХЕМА выявляет локальные неровности лунного рельефа. Он обнаруживает локальные максимумы высоты лунной поверхности. Яркость "горизонтального" участка поверхности на вершине находится как средняя яркость изображения в круглом окне, описанном вокруг исследуемого пиксела с радиусом 15 пикселов. В направлении солнечного освещения выделяется цепочка из 5 пикселов, центрированная на исследуемый пиксел. Методом наименьших квадратов находится линейная зависимость между положением пиксела в цепочке и его яркостью. С помощью этой зависимости находится расчетное положение пиксела с яркостью "горизонтального" участка, лежащего на вершине. Вычисленный пиксел наносится на схему черной точкой. Эта операция повторяется для всех пикселов изображения. Сглаживание по пяти точкам позволяет выявлять детали, которые незаметны даже на SAAM-изображениях, но при этом теряется разрешение. Поэтому СХЕМА и SAAM-алгоритм не дублируют, а дополняют друг друга. [13,14]
Пример работы алгоритма СХЕМА показан на рис.4.
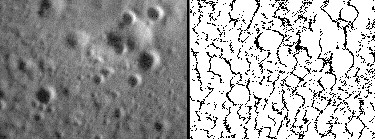
Рис.4. HIRES-изображение LHD0331A.062 (слева) и схема локальных возвышенностей, выявленных алгоритмом СХЕМА.
4.4 База данных информационной справочной системы номенклатуры лунных образований
Построение автоматизированных информационных справочных систем базы данных фотометрических параметров, морфологических характеристик и номенклатурных обозначений деталей рельефа на поверхности планет и спутниках.
Создана автоматизированная база данных информационной справочной системы номенклатуры лунных образований. В базе данных используется единая система номенклатурных обозначений лунного рельефа, утвержденная решением Международного астрономического союза (МАС). Категории лунного рельефа в системе МАС приведены в таблице. [14,16]
Таблица
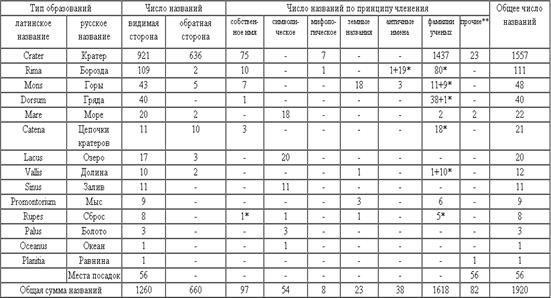
*-лунные образования, именованные по названию близлежащего кратера или пика.
**-лунные образования, именованные по названию лабораторий, институтов, городов, космических аппаратов.
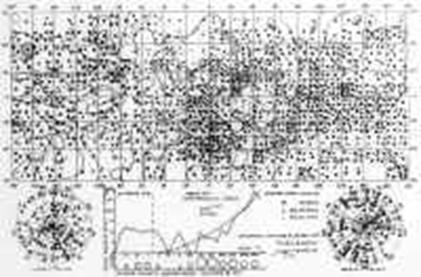
Рис. 3 распространение на луне именованных кратеров передает карта плотности именованных объектов диаметром от 2.5 до 50 км и более в пределах трапеций 10о * 10о
Метод математического моделирования был применен для изучения статистики распределения кратеров, лунок, отдельных камней и других элементов лунного рельефа. Составлен комплекс программ компьютерной обработки "морфологического каталога кратеров луны" для прогнозирования плотности распределения и оценки структуры мелких рельефных образований и относительного геологического возраста поверхности.
5. Пример одной программы
При выполнении расчётов было использовано программное приложение, разработанное на кафедре небесной механики, астрометрии и гравиметрии астрономического отделения физического факультета МГУ. Алгоритм вычисления теоретического значения результатов измерений движения Луны по орбите вокруг Земли на алгоритмическом языке Паскаль выглядит следующим образом (данные см Приложение 1): [17,18]
{ to make deal with the Lunar laser observations }
UNIT UnLunObs ;
INTERFACE
Uses
UnConTyp ; { for TVect3 for example }
Procedure TryMoonLaserObs ;
Procedure TryMoonReflCoor ( nscomp : Integer ) ;
IMPLEMENTATION
Uses
UnQLBinF , { for BinName and BinFile LaserObs of TLaserObs }
UnForPrt , { for protocol file PrtFile }
UnStCoor , { for station position in different system }
UnRefLun , { for Lunar reflector position BarCReflPos }
UnForTim , { for type TMoment }
UnParMod , { for type TParMod and ModelCor procedure }
UnVarDoi , { to try to improve some parameters }
UnPseudo , { for TypeDimM }
UnRefCor ; { for ToGetRefraCor }
{ a try to compare observations with calculations
observable value two-way time delay is in LaserObs.dobs in second }
Function ToGetLunaR ( obs : TLaserObs ; par : TParMod ) : Extended ;
Var
Eph1 : Extended ; { barycentric moment of fire }
Pos1 : TVect3 ; { station pos refer to Solar barycentre }
Eph2 : Extended ; { barycentric moment of reflection }
Pos2 : TVect3 ; { reflector position refer to Solar barycentre }
Eph3 : Extended ; { barycentric moment of receive in scale T_eph }
Pos3 : TVect3 ; { station position in receive moment }
utc3 : TMoment ; { receive moment scale UTC }
ref1 : Extended ; { the first correction for refraction in meter }
ref2 : Extended ; { the second correction for refraction in meter }
CelT : TMatr33 ; { celestial terrestrial matrix }
Begin
BarCStatPos(obs,par,obs.obst,Eph1,Pos1,CelT); { UnStCoor fire moment }
BarCReflPos(obs,par,Eph1,Pos1,Eph2,Pos2); { UnRefLun reflector }
ref1:=ToGetRefraCor(obs,Pos1,Pos2,CelT); { unit UnRefCor }
StatReceive(obs,par,Eph2,Pos2,Eph3,Pos3,CelT,utc3); { UnStCoor }
ref2:=ToGetRefraCor(obs,Pos3,Pos2,CelT); { unit UnRefCor }
ToGetLunaR:=86400*VelOfLight*(utc3.part-obs.obst.part) { two-way delay }
+1.0e-3*(ref1+ref2); { plus refraction two-way correction }
End;
Procedure ToWriteCurDif ( num : Integer ;
obs : TLaserObs ;
dif : Extended ) ;
Begin
WriteLn(num:6,obs.nsar:5,obs.nsto:6,
VelOfLight*obs.dobs:16:6,
dif:16:6,1.0e3*(dif-VelOfLight*obs.dobs):16:3);
WriteLn(PrtFile,num:6,obs.nsar:5,obs.nsto:6,
VelOfLight*obs.dobs:16:6,
dif:16:6,1.0e3*(dif-VelOfLight*obs.dobs):16:3);
End;
{ to read record by record from binary file with observations }
Procedure TryMoonLaserObs ;
Var
obs : TLaserObs ; { type from UnQLBinF }
par : TParMod ; { model differences to parameters from UnParMod }
dif : Extended ; { two way delay as calculated }
Begin
ModelCor(0,0,par); { nullo corrections from unit UnParMod }
Assign(BinFile,BinName); { all variables from UnQLBinF }
{$I-}
ReSet(BinFile);
{$I+}
If IOResult <> 0 Then Exit ; { no binary file }
NumObsCur:=0; { var in UnQLBunF count for observations in binary file }
WriteLn(PrtFile);
While NOT EOF(BinFile) Do
Begin
Read(BinFile,obs); { record LaserObs of TLaserObs from UnQLBinF }
NumObsCur:=NumObsCur+1; { the next record }
dif:=ToGetLunaR(obs,par); { simple actions }
ToWriteCurDif(NumObsCur,obs,dif);
End;
Close(BinFile);
End;
Procedure TryMoonReflCoor ( nscomp : Integer ) ;
Var
itr : Byte ; { count for variation }
nuc : Integer ;
obs : TLaserObs ;
par : TParMod ; { from unit UnParMod }
dif : Extended ;
dip : TypeDimM ;
sip : TypeDimM ; { type from UnPseudo }
Begin
ModelCor(0,0,par); { from UnParMod }
Assign(BinFile,BinName); { all variables from UnQLBinF }
{$I-}
ReSet(BinFile);
{$I+}
If IOResult <> 0 Then Exit ; { no binary file }
itr:=0; { for result without variation }
WriteLn('a try to adjust position Luna reflector ',nscomp);
WriteLn(PrtFile);
WriteLn(PrtFile,'a try to adjust position Luna reflector ',nscomp);
nuc:=0; { simple count }
Repeat
If itr > 0
Then
WriteLn('variation number',itr:3,',',nuc:6,' observations');
ReSet(BinFile);
nuc:=0; { count for selected observations in binary file }
While NOT EOF(BinFile) Do
Begin
Read(BinFile,obs); { record LaserObs of TLaserObs from UnQLBinF }
If obs.nsar = nscomp
Then
Begin
nuc:=nuc+1;
dif:=ToGetLunaR(obs,par); { simple actions in km }
DimVar[itr]^[nuc]:=dif; { for variation }
If itr = 0
Then { residual }
DimObs^[nuc]:=VelOfLight*obs.dobs-dif;
End;
End;
itr:=itr+1;
ModelCor(2,itr,par); { variation of itr coor of Lunar reflector }
Until itr > 3 ;
Close(BinFile);
ClcCorrections(nuc,dip,sip); { from unit UnVarDoi }
AfterCorPos(nscomp,dip,sip); { from unir UnRefLun correction to CorMop }
End;
END.
6. Модель Лунной Станции
Лунная исследовательская мобильная база "ЛИМБ" - "нулевой цикл" построения стационарного лунного обитаемого полигона универсального назначения:
- анализа и первичного освоения лунных энерго-материалоресур-сов;
- создания серии обсерваторий анализа Солнечно – Земных связей, астроисследований и наблюдения Земли;
- исследования потенциальных возможностей совершенствования земных служб связи, экологического мониторинга, анализа сырьевых ресурсов.
Параметры комплекса "ЛИМБ" позволяют:
- осуществить технологические наработки по характеристикам перспективных типовых лунных технических комплексов (ресурсных, энергетических, экологических, коммуникационных);
- подготовить материальную базу обитаемых систем, используя переработку лунного грунта (резервы кислорода, азота, воды, метана, гелия, углекислого газа и пр.);
- отработать технологию добычи и доставки на Землю экологически чистого ядерного топлива Гелий – 3 (3He);
- отработать технику программного и аварийного покидания Луны экипажем на базе ракетной системы, использующей топливо лунного производства (жидкие метан и кислород).
Масштабность "ЛИМБ" позволяет ограничится 6 – 7 пусками транспортной системы "Протон", существующей системы космической связи, российской производственной базой при реализации в течение 5 – 7 лет с затратами порядка четверти затрат на станцию "Мир" или одного процента на Международную Космическую Станцию ("МКС").
Состав и последовательность наращивания комплекса:
1. Комбайн Лунного Материалообеспечения ("КЛМ"). Мобильная система на базе "Лунохода" ("Ровера" - США), дополненная системой обработки грунта и сбора газообразных продуктов (ШАР - 1) формируется двумя запусками. Система снабжена зеркальным солнечным теплоэлектрогенератором мощностью "1 МВт и активно функционирует в течение лунных дней с ресурсами более 3-х лет.
2. Накопитель Обеспечивающей Продукции ("НОП"). Мобильная система координации работы комплекса связи с Землей, дистанционного управления элементами комплекса, потенциальный центр материального и энергетического обеспечения лунной обитаемой базы. Агрегат, использующий базу "Лунохода", снабжённый системой перекачки газообразных продуктов "КЛМ" и их доведения до потребительских кондиций (сжатия, сжижения, получения льда), хранения с использованием условий лунной ночи (изделие "Шар – 2"), формируется двумя запусками "Протона". Он снабжается солнечным теплоэнергогенератором мощность "0,1 МВт для работы обслуживающих систем, комплекса управления и связи с Землёй.
3. Ракетный Сектор Транспортировки ("РСТ"). Область действия - у поверхности Луны (с дальностью до полусферы), на трассах "Луна – искусственный спутник Земли ("ИСЛ"), "Луна – Земля", Луна – искусственный спутник Земли ("ИСЗ"), "ИСЛ – ИСЗ".
Серия строится с использованием лунного топлива (жидкие метан и кислород), унифицированных двигателей и баков. Для локальных окололунных операций обеспечивается мягкая посадка лунных обсерваторий, возврат и многократное использование ракет.
Она обеспечивается серией запусков "Протона" типовых машинных модулей, монтируемых и заправляемых на Луне, - развитием российских программ "Луна 15 - Луна 24".
Принципиальной особенностью системы обработка поверхностного слоя лунного грунта с имплантантами"солнечного ветра" является производство массы сопутствующей продукции (около 180 т при добыче 10 кг гелия – 3), включающей пары воды газообразные водород, гелий, этан, углекислый и угарный газы, азот.
Это определяет предпосылки создания самодостаточной безрасходной лунной базы с солнечными концентратором и термоэлектрогенераторами, использующей условия лунных дня и ночи, малой гравитации и космического вакуума. [20,21]
Производимые продукты (по структуре и массе) обеспечивают автономную систему жизнеобеспечения на 6 – 8 космонавтов, ракетное топливо (жидкие этан – кислород) окололунных операций и доставки обработанной продукции на Землю или орбиту ИСЗ, подготовленную структуру, радиопривод, площадку и начальное материальное обеспечение развёртываемой обитаемой станции.
Принципиально возможно предварительное создание спасательной ракеты возврата на Землю на тех же топливных компонентах, подготовленную заранее до прилёта первичного экипажа и находящуюся в дежурном режиме.
Программа строится на базе материалов по системам "Appolo", "Lunar Pathfinder" (США), российских разработок НПО им. С.А.Лавочкина, РКК "Энергия", Центра им. М.В. Хруничева, ЦНИИмаш, Научного Центра "Курчатовский институт", ГЕОХИ, ГАИШ, Исследовательского Центра им. М.В.Келдыша.
Как, наверное, всем известно, при полетах на Луну в кораблях Аполлон использовались бортовые ЭВМ - в командном модуле компьютер отвечал за коррекции орбиты при полете на Луну и обратно, орбитальные операции и за ориентацию CSM, в лунных модулях компьютер использовался для самой драматичной части полета - посадке на поверхность Луны, обеспечивая необходимый режим работы главного двигателя посадочной ступени, ориентацию и навигацию. И, конечно при орбитальных операциях по сближению и стыковке с CSM. Особенностью бортовых вычислительных систем Аполло была уникальность программного обеспечения каждой миссии. Это было вызвано, прежде всего, ограниченными возможностями ЭВМ того времени, в частности объемом памяти для хранения программ, различавшимися условиями и задачами программами полетов.
На снимке ниже приведена структура бортового вычислительного комплекса Аполло
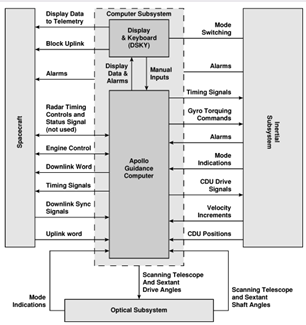
YAAGC представляет собой виртуальную машину, в точности воспроизводящую архитектуру бортового компьютера Аполло, как утверждают авторы проекта, виртуальный AGC полностью соответствует своему железному предку - вплоть до времени выполнения программ, что позволяет в полной мере прочувствовать условия эксплуатации ЭВМ тех лет.
Проект Virtual AGC and AGS также реализовал свою версию ассемблера YUL - языка, который использовался для программирования полетных миссий Аполлон, наверное, кому-то это может быть интересным сточки зрения истории техники. Доступна вся информация о структуре и синтаксисе YUL, что делает возможным самостоятельное освоение языка, на котором летали Аполлоны.
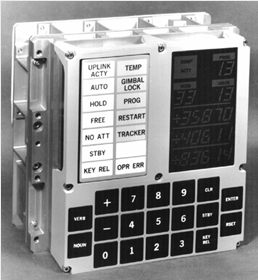
YADSKY - виртуальная панель (на снимке выше) дисплей и клавиатура, с помощью которых астронавты общались с бортовым компьютером Аполло, вводили программы и данные, проводили тесты и получали информацию о состоянии ЭВМ.
С помощью виртуальной машины AGS, которая может выполняться на Linux, Windows XP, Mac OS X 10.3 и выше (и даже FreeBSD), можно получить представление о методах и формах работы с бортовым компьютерам Аполло. [21]
Заключение
В данном курсовом проекте были рассмотрены основные проблемы освоения естественного спутника нашей планеты Земля, а также предлагаемые пути решения этих проблем. Следует отметить, что для более качественного и быстрого развития освоения космоса в целом немаловажную роль играет и современное программное обеспечение, мощные компьютеры и их процессоры, так как без аппаратных средств невозможно дальнейшее развитие человечества.
Показано, что компьютеризированная археологическая разведка Луны осуществима. Предложенные и апробированные алгоритмы могут использоваться для более интенсивного археологического обзора Луны и других планет.
Обработано приблизительно 80 тыс. орбитальных изображений Луны, переданных космической станцией "Клементина", и отобран ряд квази-прямоугольных узоров
Подводя итог можно сказать, что за довольно небольшой промежуток времени второй половины 20 века и начала 21 века сильно увеличились знания о Луне. Благодаря изучению Луны из космоса наука продвинулась вперед. Мы смогли увидеть обратную сторону Луны, составить подробные карты лунной поверхности, определить наличие магнитного поля, получить огромного количество фотографий, и самое главное: обнаружили воду. И все это было сделано на протяжении 60 лет.
Библиографический список
Исследование Солнечной Системы [Электронный ресурс] / Научные статьи; ред.Дружков А.,2005- .-Режим доступа galspace.spb/nature.file/luna.html, свободный.-Загл. с экрана.
NASA World Wind [Электронный ресурс] / ред. Randolph Kim; Web-мастер NASA Patrick Hogan -2008-.- Режим доступа worldwind.arc.nasa.gov/index.html свободный.- Загл. с экрана.
Википедия [Электронный ресурс] / Геопортал NASA World Wind .-2009-.- Режим доступа ru./wiki/NASA_World_Wind свободный.- Загл. с экрана.
Энциклопедия неогеографии [Электронный ресурс]/ NASA World Wind.-2008-.- Режим доступа wiki.googis/NASA_World_Wind свободный.- Загл. сэкрана.
WorldWind Central [Электронныйресурс]/ Video Card Compatibility.-. 2010-.-Режим доступа worldwindcentral/wiki/Video_Card_Compatibility свободный.- Загл. с экрана.
ITC.UA [Электронный ресурс]/ украинский онлайн-ресурс; ред. Данилов О.,; Издательский Дом IT, 2008-.- Режим доступа itc/node/22619/ свободный.- Загл. с экрана.
Newsland [Электронный ресурс]/ информационно-дискуссионный портал.-. Режим доступа newsland/index/tag/id/2620/ord/6/ свободный.- Загл. сэкрана.
DoD/NASA, Mission to the Moon, Deep Space Program Science Experiment, Clementine EDR Image Archive. Vol. 1-88. Planetary Data System & Naval Research Laboratory, Pasadena, 2005 (CDs).
ОсвоениеЛуны[Электронныйресурс]/ Гипотезыиисследования.-. 2010-.-Режим доступа ligaspace.my1/news/2009-06-10-162 свободный.- Загл. с экрана.
Интерфакс [Электронный ресурс]/ Новости.- . Режим доступа interfax/news.asp?id=109975 свободный.- Загл. сэкрана.
Holz, R.K. "Cultural features imaged and observed from Skylab 4", In: "Skylab Explores the Moon". NASA SP-380. Washington: NASA, 2007, p.225-242
Космическая энциклопедия [Электронный ресурс]/ Космическая энциклопедия Режим доступа kosmos.claw/shared/605.html свободный.- Загл. с экрана.
Око планеты [Электронный ресурс]/ Археологическая разведка; ред. Архипов А.В. -2009-.- Режим доступа kosmos.claw/shared/605.html свободный.- Загл. сэкрана.
Arkhipov, A.V., and Graham, F.G. "Lunar SETI: A Justification", in "The Search for Extraterrestrial Intelligence (SETI) in the Optical Spectrum II", ed. S.A. Kingsley & G.A. Lemarchand, SPIE Proceedings, Vol. 2704, SPIE, Washington, 1996, 150-154 c.
Carlotto, M., Lunar Mysteries, "Quest for Knowledge", 1997, 1- 61p.
Arkhipov A.V. "Earth-Moon System as a Collector of Alien Artefacts", J. Brit. Interplanet. Soc., p.1998, 51- 181
Татевян С.К., Сорокин Н.А., Залёткин С.Ф. Об одном методе численного интегрирования дифференциальных уравнений первого и второго порядка в астродинамике и космической геодезии. /Пакеты прикладных программ. М., изд-во Московского государственного университета, 1997, с.60-119.
Татевян С.К., Сорокин Н.А., Залёткин С.Ф. О построении многочленных приближений при численном решении дифференциальных уравнений в орбитальном методе космической геодезии. //Известия высших учебных заведений.
28-04-2015, 23:36