
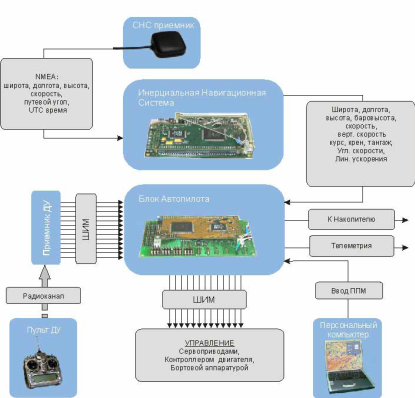
Рис. 1. Функциональная схема системы управления пространственным положением остронаправленной АС в комплексах управления БЛА
Основная задача, выполняемая системой управления пространственным положением остронаправленной АС, – обеспечить устойчивое вхождение в связь с объектом, заданным полетным заданием.
Эта задача распадается на ряд подзадач:
• Обеспечение пространственной ориентации ДН АС в направлении ожидаемого появления излучения объекта связи и ее пространственной стабилизации для случая расположения АС на борту летательного аппарата.
• Расширение зоны устойчивого захвата излучения объекта связи за счет применения дискретного алгоритма пространственного сканирования с детерминированной пространственно-временной структурой.
• Переход в режим устойчивого автосопровождения объекта связи системой АСН при обнаружении объекта связи.
• Обеспечение возможности повторного вхождения в связь в случае ее срыва. Для дискретного алгоритма пространственного сканирования с детерминированной пространственно-временной структурой можно выделить следующие особенности:
• Сканирование ДН АС осуществляется дискретно во времени и в пространстве. • Пространственные перемещения ДН АС при сканировании осуществляются таким образом, чтобы не оставалось пространственных зон, которые не перекрываются зоной уверенного захвата система АСН за весь цикл сканирования (см. рис.2).
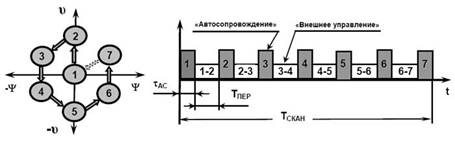
Рис.2. Пример организации дискретного пространственного сканирования в азимутальной и угломестной плоскостях
Для каждого конкретного пространственного положения, определяемого алгоритмом сканирования, можно выделить две фазы: «Автосопровождение» и «Внешнее управление».
• В фазе «Автосопровождение» система АСН осуществляет оценку возможности приема излучения объекта связи для выбранного пространственного положения РСН.
В случае положительного результата оценки: Пространственное сканирование прекращается. Система АСН продолжает осуществлять автосопровождение излучения объекта связи по своему внутреннему алгоритму. На вход сервопривода АС поступают сигналы пространственной ориентации АС по данным текущего пеленга объекта связи от системы АСН XАСН (t). В случае отрицательного результата оценки: Осуществляется пространственное перемещение РСН АС в следующее пространственное положение, определяемое алгоритмом сканирования.
• В фазе «Внешнее управление» на выходе процессора управления антенной системой формируются сигналы управления сервоприводом АС. Компоненты сигнала управления сервоприводом обеспечивают:
X0 – первоначальную пространственную ориентацию ДН АС в направлении на объект связи; ∆XЛА (t)–парирование пространственных эволюций летательного аппарата; XАЛГ (t) – расширение зоны устойчивого захвата излучения объекта связи системы АСН в соответствии с дискретным алгоритмом пространственного сканирования с детерминированной пространственно-временной структурой.
В случае срыва связи, начиная с момента времени ТСВ=0 (пропадание сигнала «СВЯЗЬ»), сигнал XАСН (ТСВ=0 ) запоминается в устройстве «Вычисления и хранения», и используется в дальнейшем процессором управления АС в качестве значения ожидаемого пеленга объекта связи. Процесс вхождения в связь повторяется как описано выше. В режиме «Внешнее управление» сигнал управления сервоприводом остронаправленной АС по каналам «курс», «тангаж» и «крен» может быть записан
 (1)
(1)
В режиме «Автосопровождение» сигнал управления сервоприводом остронаправленной АС может быть записан
 (2)
(2)
Конкретный вид сигналов управления определяется конструктивными особенностями сервопривода антенной системы.
Инерциальная система БЛА
Ключевым моментом в упомянутой цепочке является «измерение состояния системы».То есть координат местоположения, скорости, высоты, вертикальной скорости, углов ориентации, а также угловых скоростей и ускорений. В бортовом комплексе навигации и управления, разработанном и производимым ООО «ТеКнол», функцию измерения состояния системы выполняет малогабаритная инерциальная интегрированная система (МИНС). Имея в своем составе триады инерциальных датчиков микромеханических гироскопов и акселерометоров), а также барометрический высотомер и трехосный магнитометр, и комплексируя данные этих датчиков с данными приемника GPS, система вырабатывает полное навигационное решение по координатам и углам ориентации. МИНС разработки ТеКнола – это полная Инерциальная система, в которой реализован алгоритм бесплатформенной ИНС, интегрированной с приемником системы спутниковой навигации. Именно в этой системе содержится «секрет» работы всего комплекса управления БЛА. По сути, одновременно работают три навигационных системы в одном вычислителе по одним и тем же данным. Мы их называем «платформами». Каждая из платформ реализует свои принципы управления, имея свои «правильные» частоты (низкие или высокие). Мастер-фильтр выбирает оптимальное решение с любой из трех платформ в зависимости от характера движения. Этим обеспечивается устойчивость системы не только в прямолинейном движении, но и при виражах, некоординированных разворотах, боковом порывистом ветре. Система никогда не теряет горизонт, чем обеспечиваются правильные реакции автопилота на внешние возмущения и адекватное распределение воздействий между органами управления БЛА.
Бортовой комплекс управления БЛА
В состав Бортового Комплекса Навигации и Управления БЛА входят три составных элемента (Рисунок 1).
1. Интегрированная Навигационная Система;
2. Приемник Спутниковой Навигационной системы
3. Модуль автопилота.__
Модуль автопилота осуществляет выработку управляющих команд в виде ШИМ (широтно-импульсно-модулированных) сигналов, сообразно законам управления, заложенным в его вычислитель. Помимо управления БЛА, автопилот программируется на управление бортовой аппаратурой:
• стабилизация видеокамеры,
• синхронизированное по времени и координатам срабатывание затвора
фотоаппарата,
• выпуск парашюта,
• сброс груза или отбор проб в заданной точке
и другие функции. В память автопилота может быть занесено до 255 поворотных пунктов маршрута. Каждая точка характеризуется координатами, высотой прохождения и скоростью полета.
В полете автопилот также обеспечивает выдачу в канал передачи телеметрической информации для слежения за полетом БЛА (Рисунок 2).
А что же тогда представляет собой «квазиавтопилот»? Многие фирмы сейчас декларируют, что обеспечивают своим системам автоматический полет с помощью «самого маленького в мире автопилота».
Наиболее показательный пример такого решения — продукция канадской фирмы “Micropilot”. Для формирования сигналов управления здесь используют «сырые» данные – сигналы от гироскопов и акселерометров. Такое решение по определению не является робастным (устойчивым к внешним воздействиям и чувствительным к условиям полета) и в той или иной степени работоспособно только при полете в стабильной атмосфере.


Любое существенное внешнее возмущение (порыв ветра, восходящий поток или воздушная яма) чревато потерей ориентации летательного аппарата и аварией. Поэтому все, кто когда-либо сталкивался с подобной продукцией, рано или поздно понимали ограниченность таких автопилотов, которые никак не могут быть использованы в коммерческих серийных системах БЛА.
Более ответственные разработчики понимая, что необходимо настоящее навигационное решение, пытаются реализовать навигационный алгоритм с применением известных подходов Калмановской фильтрации.
К сожалению, и здесь не все так просто. Калмановская фильтрация — это всего лишь вспомогательный математический аппарат, а не решение задачи. Поэтому невозможно создать робастную устойчивую систему, просто перенося на MEMS интегрированные системы стандартный математический аппарат. Требуется тонкая и точная настройка на конкретное приложение. В данном случае – для маневренного объекта крылатой схемы. В нашей системе реализован более чем 15-ти летний опыт разработки инерциальных систем и алгоритмов комплексирования ИНС и GPS. К слову сказать, в мире только несколько стран обладают ноу-хау инерциальных систем. Это
Россия, США, Германия, Франция и Великобритания. За этим ноу-хау стоят научные, конструкторские и технологические школы, и по меньшей мере
наивно думать, что такую систему можно разработать и изготовить «на коленке» в институтской лаборатории или в ангаре аэродрома. Дилетантский подход здесь, как и во всех прочих случаях, чреват в конечном счете финансовыми потерями и потерей времени. Почему столь важен автоматический полет применительно к задачам, решаемым предприятиями топливно-энергетического комплекса? Понятно, что сам воздушный мониторинг не имеет альтернативы. Контроль за состоянием трубопроводов и других объектов, задачи охраны, мониторинга и видеонаблюдения лучше всего решаются с применением летательных аппаратов. А вот снижение издержек, обеспечение регулярности полетов, автоматизация сбора и обработки информации — здесь, совершенно справедливо уделяется внимание беспилотной технике, что и доказывает высокий интерес специалистов к проходящей выставке и форуму. Однако, как мы видели на выставке, беспилотные системы также могут представлять собой сложные и дорогие комплексы, требующие поддержки, обслуживания, создания наземной инфраструктуры и служб эксплуатации. В наибольшей степени это относится к комплексам, изначально созданным для решения военных задач, а теперь спешно адаптируемым к хозяйственным применениям. Отдельно остановимся на вопросах эксплуатации. Управление БЛА — задача для хорошо подготовленного профессионала. В армии США операторами БЛА становятся действующие пилоты ВВС после годовой подготовки и тренинга. Во многих аспектах это сложнее, чем пилотирование самолета, и, как известно, большинство аварий беспилотных ЛА вызваны ошибками пилота-оператора. Автоматические системы БЛА, оснащенные полноценной системой автоматического управления требуют минимальной подготовки наземного персонала, при этом решают задачи на большом удалении от места базирования, вне контакта с наземной станцией, в любых погодных условиях. Они просты в эксплуатации, мобильны, быстро развертываются и не требуют наземной инфраструктуры. Можно утверждать, что высокие характеристики систем БЛА, оснащенных полноценной САУ, снижают эксплуатационные издержки и требования к персоналу.

Системы автоматических БЛА
Каковы же практические результаты применения бортового комплекса с настоящей инерциальной системой? Компания «ТеКнол» разработала и предлагает заказчикам системы автоматических БЛА быстрого развертывания для решения задач мониторинга и воздушного наблюдения. Эти системы представлены на нашем стенде на выставке.
Автопилот в составе бортового комплекса навигации и управления обеспечивает
• Автоматический полет по заданному маршруту;
• Автоматический взлет и заход на посадку;
• Поддержание заданной высоты и скорости полета;
• Стабилизацию углов ориентации;
• Программное управление бортовыми системами.
Оперативный БЛА.
Система многоцелевого БЛА разрабатывается компанией «Транзас» и оснащается комплексом навигации и управления «ТеКнола».
Поскольку управление БЛА малого размера представляет наиболее трудную задачу, приведем примеры работы бортового комплекса навигации и управления для оперативного мини-БЛА взлетным весом 3,5 кг.
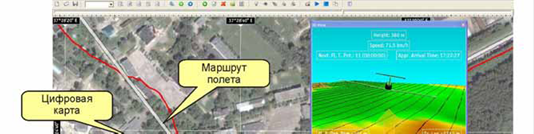
При проведении аэросъемки местности БЛА совершает полет по линиям с интервалом 50-70 метров. Автопилот обеспечивает следование по маршруту с отклонением, не превышающим 10-15 метров при скорости ветра 7 м/с (Рисунок 5).
Понятно, что самый опытный пилот-оператор не в состоянии обеспечить такую точность управления.

Рис. 5: Маршрут и траектория полета мини БЛА при съемке местности
Поддержание заданной высоты полета также обеспечивается МИНС, которая вырабатывает комплексное решение по данным GPS, барометрического высотомера и инерциальных датчиков. При автоматическом полете по маршруту бортовой комплекс обеспечивает точность поддержания высоты в пределах 5 метров (Рисунок 6), что позволяет уверенно летать на малых высотах и с огибанием рельефа.

Рис. 6
Рисунок 7 показывает, как САУ выводит БЛА из критического крена в 65º, в результате воздействия порыва бокового ветра при совершении маневра. Только настоящая ИНС в составе бортового комплекса управления в состоянии обеспечить динамичное измерение углов ориентации БЛА, не «потерять горизонт». Поэтому в процессе испытаний и эксплуатации наших БЛА ни один самолет не был потерян при полете под управлением автопилота.
Еще одной важной функцией БЛА является управление видеокамерой. В полете стабилизация камеры переднего обзора обеспечивается отработкой колебаний БЛА по крену по сигналам автопилота и данным МИНС. Таким образом картинка видео изображения оказывается стабильной, несмотря на колебания ЛА по крену. В задачах аэрофотосъемки (например, при составлении аэрофотоплана предполагаемого района проведения работ) точная информация об углах ориентации, координатах и высоте БЛА совершенно необходима для коррекции аэрофотоснимков, автоматизации сшивки кадров.
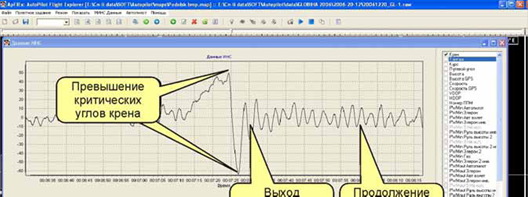

Рис. 7
Беспилотный комплекс аэрофотосъемки также разрабатывается ООО «ТеКнол». Для этого производится доработка цифрового фотоаппарата и его включение в контур управления автопилотом. Первые полеты намечено провести весной 2007 года. Помимо упомянутых систем БЛА быстрого развертывания Бортовой Комплекс Навигации и Управления БЛА эксплуатируется СКБ «Топаз» (БЛА «Ворон»), устанавливается на новом БЛА разработанном компанией «Транзас» (многоцелевой комплекс БЛА «Дозор»), проходит испытания на мини БЛА компании Global Teknik (Турция). Ведутся переговоры с другими российскими и зарубежными клиентами. Изложенная выше информация и, главное, результаты летных испытаний, со всей очевидностью свидетельствуют, что без полноценного бортового комплекса управления, оснащенного настоящей инерциальной системой, невозможно построение современных коммерческих систем БЛА, которые могут решать задачи безопасно, оперативно, в любых погодных условиях, с минимальными издержками со стороны эксплуатирующих служб. Такие комплексы серийно выпускаются компанией «ТеКнол».
Выводы
Рассмотренный состав бортового оборудования БЛА позволяет обеспечить решение широкого круга задач по мониторингу местности и труднодоступных для человека районов в интересах народного хозяйства. Применение в состав бортового оборудования телевизионных камер позволяет в условиях хорошей метеовидимости и освещенности обеспечить высокое разрешение и детальный мониторинг подстилающей поверхности в режиме реального времени. Применение ЦФА позволяет использовать БЛА для проведения аэрофотосъемки в заданном районе с последующей детальной дешифровкой. Использование ТПВ аппаратуры позволяет обеспечить круглосуточность применения БЛА, хотя и с меньшим разрешением, чем при использовании телевизионных камер. Наиболее целесообразно применение комплексных систем, например ТВ-ТПВ, с формированием синтезированного изображения. Однако такие системы пока еще достаточно дороги. Наличие на борту РЛС позволяет получать информацию с меньшим разрешением, чем ТВ и ТПВ, но круглосуточно и при неблагоприятных метеоусловиях. Применение сменных модулей устройств получения видовой информации, позволяет снизить стоимость и реконфигурировать состав бортового оборудования для решения поставленной задачи в конкретных условиях применения. Возможность обеспечения устойчивой связи является одной из важнейших характеристик, определяющих эксплуатационные возможности комплекса управления БЛА. Предложенная система управления пространственным положением остронаправленной АС в комплексах управления БЛА обеспечивает оптимизацию процесса вхождения в связь и возможность восстановления связи в случае ее потери. Система применима для использования на БЛА, а также на пунктах управления наземного и воздушного базирования.
Используемая литература
1. airwar/bpla.html
2. ru./wiki/UAV
3. ispl/Sistemy_upravleniya-BLA.html
4. teknol/products/aviation/uav/
5. Орлов Б.В., Мазинг Г.Ю., Рейдель А.Л., Степанов М.Н., Топчеев Ю.И. - Основы проектирования ракетно-прямоточных двигателей для беспилотных летательных аппаратов.
28-04-2015, 23:38