В каналах, где сохраняется призматичность и устойчивость формы русла, для определения vcp достаточно использовать одну репрезентативную вертикаль. По исследованиям А.А. Осиповича и В.П. Рагуновича (ЦНИИКИВР), эта вертикаль расположена на расстоянии 0,2b от уреза воды в канале (b - полуширина канала по дну – см.рис. 1). Отклонение местных скоростей течения на этой вертикали от средней для всего потока находится в пределах 2-3%.
Для ускорения измерений средних скоростей на вертикалях служат установки – интегратор ГР-101 и полуавтоматическая штанга с батареей микровертушек, разработанная М.И. Бирицким (ЦНИИКИВР).
2.1 Интеграционные измерения с движущегося судна
Интеграция скоростей течения с движущегося судна может производится:
а) вертушкой (или другим преобразователем скорости), закрепленной на определенном (постоянном) горизонте (горизонтальная интеграция);
б) Вертушкой, перемещаемой зигзагообразно от поверхности до дна потока и обратно в течение всего времени движения судна по створу.
Зигзагообразная интеграция в связи с техническими трудностями не получила распространения, поэтому ниже рассматривается только горизонтальная.
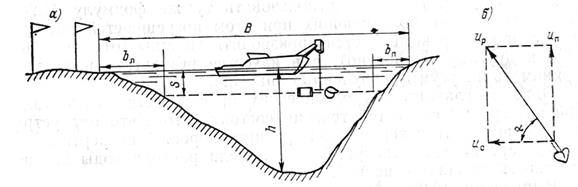
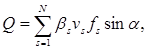
Рис.1. Принципиальная схема интеграционного измерения расхода воды с движущегося судна.
а – геометрические элементы схемы, б – сложение векторов скоростей
Горизонтальная интеграция скоростей обычно производится в поверхностном слое, так как коэффициенты перехода от поверхностей к средней скорости течения потока наиболее изучены. Принципиальная схема интеграционного измерения показана на рис.1, а один из вариантов приборного комплекса, разработанного в ГГИ. Непосредственно измеряются:
а) глубина h по створу (их регистрирует эхолот),
б) результирующая скорость up – векторная сумма поверхностоной скорости течения uп и скорости движения судна uc ,
в) угол α между осью вертушки и линией гидроствора. Если все эти элементы отнести к элементарному отсеку потока s шириной, равной расстоянию, которое судно проходит по створу за достаточно короткий интервал времени ∆t :
![]()
то можно получить фиктивный частичный расход в этом отсеке
![]()
Затем значения qф s умножаются на коэффициент К, обеспечивающий переход от фиктивного расхода к действительному. Этот коэффициент должен быть заранее известен для данного створа по результатам специальных наблюдений. Действительные значения qs в специальном вычислительном блоке последовательно суммируются (интегрируются) по мере движения судна вдоль гидроствора от одного берега к другому за время Т, что позволяет получить полный расход воды
 (8)
(8)
При косоструйном течении растет uп и us становится более сложным и требует учета угла косоструйности αк , который заранее не известен. Однако если угол косоструйности не слишком велик (менее 200 ), можно использовать ту же формулу (8). Для компенсации возникающих при этом погрешностей интеграцию скоростей рекомендуется производить дважды (от одного берега к другому и обратно), а в качестве результата измерений принимать полусумму полученных значений.
Одно из главных метрологических преимуществ горизонтальной интеграции скоростей течения состоит в том, что она устраняет погрешность интерполяции средних скоростей на вертикалях, а при вертикальной дискретизации модели расхода воды эта погрешность является основной.
Выражение (8) относится к случаю, когда интеграция скоростей течения производится в поверхностном слое при незаглубленном измерителе скорости (z=0). Если же на реке наблюдается заметное волнение, появляется плывущий мусор или ледяные образования, приходится опускать измеритель ниже поверхности воды на глубину z. Измеряемый при этом расход Qz окажется не равным фиктивному расходу Qп . Соответствующий поправочный коэффициент определяется по зависимости, полученной И. Ф. Карасевым:
![]()
где β = (bл +bп )/B – непрозондированная часть ширины русла (см. рис.1); φ = hмакс /hcp – коэффициент полноты сечения; m = 24,0 м0,5 /с – эмпирический коэффициент Базена.
Переход к действительному расходу совершается по соотношению
![]()
Точность интеграционного измерения скорости течения существенно зависит от скорости перемещения судна по створу uc : при ее увеличении возникают погрешности измерения не только из-за малости времени интеграции Т, но и из-за уменьшения uп /uc . Чтобы не допустить чрезмерного возрастания рассматриваемой погрешности, скорость перемещения судна uc должна быть ограничена некоторым достаточно малым значением, при котором еще сохраняется устойчивость судна на курсе. Опыт показывает, что эта скорость близка к поверхностной скорости потока uп .
2.2 Измерение расходов воды с использованием физических эффектов
Для измерения скоростей течения (а значит, и расходов воды) могут быть использованы различные физические эффекты: Доплера, ультразвуковые и электромагнитная индукция.
Доплеровский метод измерения скоростей течения реализуется в двух вариантах: с использованием оптических квантовых генераторов и радиолокатора.
При лазерных измерениях источником информации о скорости потока служат спектральные характеристики света. Если поток, движущийся со скоростью v , просвечивается когерентным монохроматическим излучением с частотой ω0 и волновым вектором Ао , а рассеянное излучение при частоте ωi наблюдается в направлении волнового вектора As , то значение v устанавливается непосредственно по разности частот и векторов
v = (ωi — ω0 )/(As — A0 ).
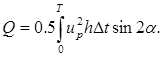
Рассеяние света создается частицами взвесей, которые содержатся в потоке или вводятся в него. Лазерные установки пока нашли применение в трубопроводах и лабораторных лотках (рис. 2 а).
Радиолокационный вариант эффекта Доплера положен в основу измерителя поверхностных скоростей течения ГР-117, разработанного в ГГИ Г. А. Юфитом. Прибор состоит из блока радиоаппаратуры, рупорной антенны, блоков анализа характеристик радиоволн, прямых и отраженных от неоднородностей на поверхности потока — турбулентных возмущений и ветровых волн (рис. 2 б).
Для определения скорости течения в установке использована зависимость
![]()
где λ— длина радиоволны, составляющая 3,2 см.
Измерения производятся с гидрометрического мостика, люльки или с берега. Минимальное значение измеряемой скорости составляет 0,4 м/с, максимальное 15 м/с, индикация результата измерения - цифровая. Радиолокационный измеритель испытан в полевых условиях. В ближайшей перспективе первые партии прибора будут выпущены для производственного использования.
Ультразвуковой (акустический) метод заключается в посылке импульсов ультразвука по косому галсу в направлении течения и против него с регистрацией двух временных интервалов — соответственно Т1 и Т2 . Ультразвуковое зондирование может производиться в различных направлениях в плане и поперечном сечении потока, но для определенности принимается горизонтальное положение ультразвукового луча, а угол, который он должен составлять с динамической осью, равным 30—60°.
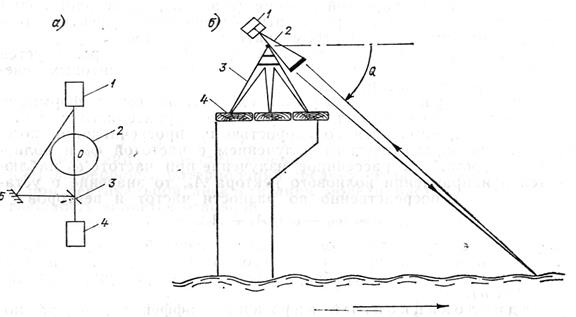
Рис.2. Варианты измерения скоростей потока с использованием эффекта Доплера.
а – лазерная установка: 1 – фотоприемник, 2 – трубопровод, 3 – разделительная пластина, 4 – источник света, 5 – зеркало, б – радиолокационный измеритель скоростей течения: 1 – радиоблок, 2 – рупорная антенна, 3 – установочная тренога, 4 – настил моста.
Для выполнения измерений необходимо выбирать прямолинейный участок с устойчивым и свободным от растительности руслом. В потоке не должно содержаться пузырьков воздуха, рассеивающих ультразвук.
Преобразователи-приемники акустических (ультразвуковых) сигналов устанавливаются на свайных опорах или непосредственно на береговых откосах (рис. 3 а). Опорные конструкции должны допускать возможность перемещения преобразователей при колебаниях уровня без нарушения их взаимной ориентировки.
Для определения скорости потока принимаются расчетные формулы, не содержащие в явном виде скорость звука в воде, что исключает необходимость в аппаратуре для ее измерения (как известно, скорость звука не остается постоянной и зависит от температуры и минерализации воды).
Ультразвуковые системы для измерения скорости течения делятся на кабельные или бескабельные соответственно тому, имеется или отсутствует кабель, связывающий приемно-передающие устройства на противоположных берегах.
Кабельный вариант (рис. 3 б) функционирует следующим образом. В начальный момент времени производится одновременное излучение ультразвуковых импульсов в точках I и II. Ультразвуковые импульсы распространяются в потоке по траектории, составляющей угол а с направлением течения. Одновременно с запуском передающих устройств 2 запускается измеритель временных интервалов 3, который останавливается после приема импульсов на противоположных берегах.
Специальный электронный блок автоматически вычисляет осредненную по измерительному галсу скорость потока
В бескабельном варианте используется акустический канал связи с блоком переизлучения ультразвуковых импульсов. Принцип измерения остается тем же, хотя общая его схема становится более сложной.
Методика и принципиальные схемы ультразвуковых измерений расходов воды на реках разработаны А.И. Затыльниковым (ГГИ). На этой основе в ЦКБ ГМП создан комплекс АИР, выпускаемый малыми сериями.
Существуют две разновидности моделей расхода воды, измеренного ультразвуковым методом.
1. Послойная интеграция скоростей, при которой осуществляется горизонтальная дискретизация модели расхода воды
где β — коэффициент, учитывающий полноту зондирования и особенности скоростной структуры во фрагменте, к которому относится осредненная скорость vs ; fs — площадь фрагмента по направлению ультразвукового луча.
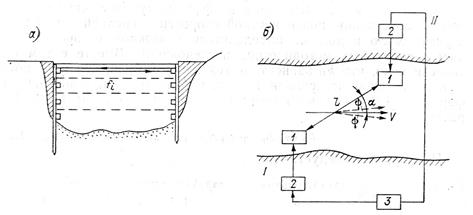
Рис.3. Принципиальная схема измерения расходов воды гидроакустической установкой.
а – установка измерительных преобразователей на свайных опорах, б – блок-схема кабельного варианта.
2. Из-за технических трудностей послойное измерение скоростей течения ультразвуком не получило распространения. В большинстве действующих установок зондирование потока производится на одном уровне. В этом случае для определенности должен зондироваться поверхностный слой и математическая модель приобретает вид
![]() (9)
(9)
где F3 — площадь водного сечения в плоскости ультразвукового зондирования; kB — коэффициент перехода от осредненной по ширине потока поверхностной скорости течения к средней.
Величина kB , не идентичная коэффициенту перехода от осредненной по сечению поверхностной скорости к средней, изучена мало и должна определяться в каждом створе по данным специальных методических исследований. Вместе с тем физически ясно, что kB зависит от тех же факторов, что и К, который достаточно исследован и может быть оценен. Связь коэффициентов К и kB полученаИ.Ф. Карасёвым
![]()
Из формулы следует, что:
| Сечение | прямоугольные | параболические | треугольное |
| φ | 1.0 | 1.5 | 2.0 |
| kB /K | 1.0 | 1.10 | 1.25 |
Косоструйность потока создает систематические погрешности ультразвуковой интеграции скоростей, но, в отличие от вертушечных измерений, эти погрешности получают разные знаки, и скорость течения оказывается завышенной, если фактическое направление струй отклоняется на угол φ внутрь острого угла α, и заниженной — в обратном случае. Для компенсации этих погрешностей международный стандарт ИСО 748—73 рекомендует вводить поправочные коэффициенты у < 1 в первом случае и у > 1 во втором. Значения этих коэффициентов определяются из простых тригонометрических соотношений и составляют у = 1 ± (0,04 + 0,08) для φ до 4° при α = 300 - 50°.
Комплекс организованных ГГИ сравнительных измерений расходов воды р. Луги показал, что ультразвуковой метод дает ту же точность, что и при непрерывной интеграции скоростей потока вертушкой с движущегося судна.
Метод электромагнитной индукции основан на эффекте возникновения электродвижущей силы в потоке воды, протекающей в магнитном поле, которое создается искусственно посредством уложенных на дно витков кабеля (рис. 4). Средняя скорость течения пропорциональна разности потенциалов на концах измерительной цепи
![]()
где φ — константа, зависящая от проводимости воды, грунтов дна и характеристик электромагнитного контура (определяется посредством градуировочных экспериментов); В — ширина реки; H — напряженность поля.
Для определения расхода воды служит формула
![]()
где h – средняя глубина потока.
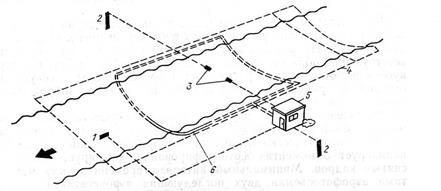
Рис.4. Комплекс для измерения расхода воды методом электромагнитной индукции(Англия).
1 – ячейка для измерения проводимости воды, 2 – измеритель проводимости дна, 3 – сигнальные зонды, 4 – кабель для передачи сигналов, 5 – павильон для хранения оборудования, 6 – катушка, создающая магнитное поле.
2.3 Аэрогидрометрический метод
Впервые в Советском Союзе комплекс аэрометодов определения расходов воды был применен при речных изысканиях для проектирования мостовых переходов (Б.К. Малявский и др.). В 1965—1966 гг. в ГГИ под руководством В.А. Урываева разработаны методические основы и необходимые технические средства для поплавочных измерений скоростей течения на реках, положившие начало широкому применению аэрометодов определения расходов воды на гидрологической сети.
Аэрогидрометрический метод представляет собой вариант поплавочных измерений. Если применение поплавков в наземных условиях ограничивается реками шириной до 300—400 м, то аэрогидрометрический способ таких ограничений не имеет.
Авиаизмерения поверхностных скоростей включают операции по маркировке водной поверхности (сбросу поплавков) и аэрофотосъемке двух последовательных положений поплавков через заданные (фиксируемые) промежутки времени.
Аэрофотосъемка осуществляется топографическими аэрофотоаппаратами, имеющими автоматическое управление, объективы большой светосилы и высокой разрешающей способности.
При аэрогидрометрических работах в основном применяются аэрофотоаппараты АФА-ТЭ (топографический, электрофицированный) с фокусным расстоянием до 100 мм. Преимущественное использование короткофокусных аэрофотоаппаратов связано с возможностью выполнения с их помощью аэрофотосъемки заданного масштаба с меньших высот, что существенно расширяет диапазон метеорологических условий производства работ.
Кассета аэрофотоаппарата заряжается пленкой длиной до 60 м, что обеспечивает съемку 300 кадров размером 18X18 см каждый.
Аэрофотоаппарат крепится над люком самолета на специальной установке, изолирующей его от вибрации и позволяющей придавать аппарату различные углы наклона и ориентировать соответствующим образом относительно направления полета. На корпусе аэрофотоаппарата размещаются уровень, часы с секундной стрелкой и нумератор кадров, которые при съемке изображаются на каждом кадре.
Управление работой аэрофотоаппарата осуществляется с помощью командного прибора, который через заданные интервалы времени автоматически открывает затвор аэрофотоаппарата, сигнализирует о моментах фотографирования, фиксирует число отснятых кадров. Минимальный интервал времени между моментами аэрофотосъемки двух последующих аэронегативов составляет в современных аэрофотоаппаратах 2,0—2,5 с.
Наиболее высокая точность определения высоты полета в момент фотографирования достигается с помощью радиовысотомеров. Средняя квадратическая погрешность этих приборов составляет 1,5—2,0 м и практически не зависит от высоты полета.
Для маркировки водной поверхности применяются специальные ураниновые поплавки, представляющие собой деревянные цилиндрики диаметром 4 см и высотой 11 см, утяжеленные у основания металлической шайбой. Вес балласта подобран таким, чтобы, приняв в воде вертикальное положение, поплавок выступал над ее поверхностью не более чем на 1,5—2,0 см. Его боковая поверхность покрыта ураниновоклеевой пастой. В воде паста растворяется и вокруг поплавка образуется ярко-зеленое пятно, которое и изображается на аэроснимках. При хорошем качестве последних по оттенкам и тональности изображения пятна обычно удается непосредственно отдешифрировать местоположение поплавка. В других случаях прибегают к косвенным методам дешифрирования. Время эффективного действия поплавка (растворения ураниновой пасты) около 15 мин.
Сбрасывание поплавков производится с самолета с помощью специального устройства — механического сбрасывателя. Поплавки размещаются по периметру сбрасывателя в специальных ячейках.
Аэрофотосъемка поплавков выполняется в два захода самолета по линии гидроствора (рис. 5). Если позволяет ширина реки и метеорологические условия (облачность, видимость), съемка производится с захватом всей ширины реки одним аэроснимком. При этом, однако, масштаб аэрофотосъемки не должен быть менее 1:15000, так как в противном случае дешифрирование изображения ураниновых поплавков становится ненадежным.
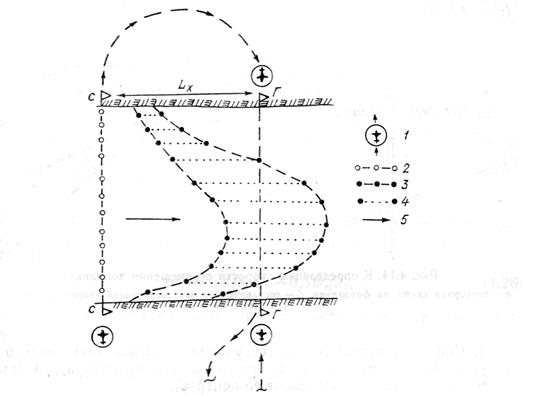
Рис.5. Схема заходов самолета на сброс и аэрофотосъемку поплавков.
1 – маршрут полета самолета, 2 – линия положения поплавков в момент сброса, 3 – линия положения поплавков в моменты аэрофотосъемок, 4 – траектории поплавков, 5 – направление течения.
Высота аэрофотосъемки рассчитывается в этом случае по формуле
![]()
где В — ширина реки; f k — фокусное расстояние аэрофотоаппарата; l к — размер кадра.
Съемка как первого, так и второго положения поплавков выполняется маршрутом максимально перекрывающихся аэроснимков (с минимальным интервалом tмин между съемками).
Фактическое время аэрофотосъемок фиксируется путем фотосъемки вмонтированных в фотоаппарат часов. Авиаизмерения скоростей сопровождаются наблюдениями за скоростью и направлением ветра на наземных пунктах или сбросом специальных ветровых поплавков.
Обработка данных авиаизмерения начинается с дешифрирования изображения поплавков на негативах, и переноса их на планшет, на котором строится план участка гидроствора в заданном масштабе.
Рассмотрим порядок обработки траектории поплавков (рис. 6 а).
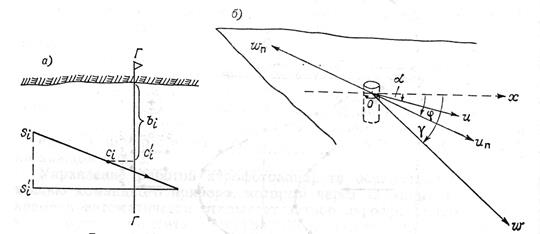
Рис 6. К определению скорости перемещения поплавка.
а – векторная схема на фотоплане, б – составляющие результирующей скорости перемещения поплавка.
1. Соединив точки, соответствующие изображению первого и второго положения поплавка, получают его траекторию в масштабе планшета Si и намечают ее центр Сi .
2. Измеряют проекцию ![]() - траектории Si
- на перпендикуляр к гидроствору.
- траектории Si
- на перпендикуляр к гидроствору.
3. Проектируют центр траектории Сi
на линию гидроствора и измеряют расстояние между точкой Сi
- и постоянным началом (берегом) bi
. Точке ![]() приписывается скорость течения, измеренная г-м поплавком (скоростная вертикаль).
приписывается скорость течения, измеренная г-м поплавком (скоростная вертикаль).
4. Вычисляют натурные значения проекции траектории поплавка ![]() и расстояния bi
. Для этого значения
и расстояния bi
. Для этого значения ![]() и bi
, измеренные на планшете, умножают на знаменатель численного масштаба планшета Мп
.
и bi
, измеренные на планшете, умножают на знаменатель численного масштаба планшета Мп
.
5. Разделив длину проекции траектории поплавка 5, на время между аэрофотосъемками (t2 — t1 ), получают проекцию скорости движения i-го поплавка uni .
6. Наконец, осуществляется переход к проекции поверхностной скорости течения и ![]() с учетом поправки на торможение поплавка от обтекания воздушным потоком (это торможение наблюдается даже при штиле)
с учетом поправки на торможение поплавка от обтекания воздушным потоком (это торможение наблюдается даже при штиле)
![]()
где ω — скорость потока воздуха на высоте 1 м от поверхности воды; γ — угол, составленный вектором ω и направлением движения поплавка ох (рис. 6 б).
Величина ε называется коэффициентом ветрового дрейфа поплавка и характеризуется постоянством значения для поплавков одного типа. Так, для речного уранинового поплавка ε = 0,013; для льдин размером до 2x2 м и толщиной 0,2 м ε = 0,017; для льдин такого же размера, но
29-04-2015, 00:51