Содержание
Введение
1 Устройство прибора
2 Программное обеспечение и обработка сигналов
3 Режимы измерений и вычисления параметров механики дыхания
Вывод
Перечень литературы
Введение
Целью данной работы было создание прибора для исследования биомеханики дыхания в условиях космического полета. Такой прибор должен быть достаточно простым в использовании, так как с ним должен работать оператор, не являющийся специалистом в области физиологии дыхания или пульмонологии. Прибор, выполняет две функции.
Первая функция — измерение всех обычных объемно-скоростных показателей функции легких (дыхательный объем, частота дыхания, минутная вентиляция легких, жизненная емкость легких, резервные объемы вдоха и выдоха, пиковые скорости вдоха и выдоха, индекс Тиффно и т. д.). Для измерения объемной скорости потока воздуха использован сетчатый датчик типа Лилли с дифференциальным манометром. Измеренные мгновенные величины потока через АЦП поступают к встроенному ПК, который вычисляет все производные параметры, выдаваемые на принтер и экран. Проблемы разработки пневмотахометров такого типа достаточно подробно освещены в литературе, поэтому здесь рассматриваться не будут.
Вторая функция прибора — определение параметров механики дыхания методом вынужденных колебаний. Данный метод был предложен давно, но из-за относительной сложности метода и нерешенности многих технических вопросов он пока не нашел столь широкого применения, как пневмо-тахометрия. Метрологическое обеспечение метода вынужденных колебаний — калибровка, оценка ошибки определения импеданса — необходимо как для «космического», так и для любого клинического варианта прибора. Поэтому в данной статье основное внимание уделено техническим и метрологическим вопросам разработки приборов, основанных на методе вынужденных колебаний.
В основе метода лежит следующая процедура измерений. С помощью внешнего устройства (динамика или насоса) создают колебания потока и давления воздуха в определенном диапазоне частот. Колебания давления регистрируются манометром, колебания потока — пневмотахометром или фотоэлементом, связанным с движением мембраны насоса.

Рисунок 1 - Фотография осцилляторного блока.
Для рассматриваемого прибора разработан выносной осцилляторный блок, в котором объединены осцилляторный насос и датчик давления (рис. 1). К осцилляторному блоку подсоединены эталонная трубка и мундштук с загубником и сеткой. Обследуемый пациент во время измерений держит за ручку этот блок (массой около 1 кг) и дышит через него. Благодаря такому конструктивному решению выносной блок соединен с основной частью прибора только электрическими проводами без пневматических соединений. Насос создает колебания потока на пяти определенных частотах с последовательным переключением их по сигналу от ПК. Положение поршня насоса регистрируется фотоэлементом, давление на выходе насоса — датчиком давления. По измеренным сигналам давления и потока определяется механический импеданс подсоединенной системы (действительная и мнимая части). Далее по действительной части импеданса определяется сопротивление; а по мнимой части импеданса — растяжимость и инерционность всей системы дыхания, верхних дыхательных путей, а также системы дыхания без верхних дыхательных путей. Все вычисленные параметры распечатываются с помощью устройства термопечати.
1. Устройство прибора
Прибор состоит из двух основных частей — осцилляторного блока с эталонным сопротивлением и электронно-цифрового блока (рис 1.1).
Основным элементом осцилляторного блока является осцилляторньй насос. Используется поршневой насос с кривошипно-шатунным механизмом, связанный с резиновыми мехами (сильфоном). При малых значениях противодавления этот насос генерирует синусоидальный поток. Благодаря небольшой величине эталонного сопротивления противодавление является малым при любой величине измеряемого импеданса. Насос имеет объем около 1 мл. Приводом насоса служит шаговый двигатель (64 шага на оборот при полушаговом управлении). Для подавления шаговой частоты приводной двигатель и кривошипно-шатунный механизм насоса связаны упруго. На кривошипно-шатунном механизме находятся метка, по которой с помощью фотоэлемента регистрируется фаза насоса. Микропроцессорное управление насосом обеспечивает синусоидальный поток с частотами 7, 10, 13, .16, 19 Гц.
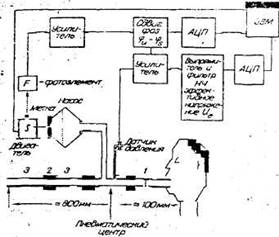
Рисунок 1.1 - Общая схема прибора.
Для удобства транспортировки эталонное сопротивление состоит из двух частей суммарной длиной 800 мм и внутренним диаметром 10 мм.
электронно-цифровой блок содержит: 8-разрядную микроЭВМ, управляющую всеми функциями прибора. МикроЭВМ работает с 8-разрядным центральным процессором типа Z 80 с тактовой частотой 2,458 мГц. Имеется постоянная память 16 Кбайт (для программ) и оперативная память 16 Кбайт.
АЦП, выполненный на основе интегральной схемы; работающий с разрешением 10 бит (10 мВ при диапазоне входного напряжения 10 В);
ленточное устройство термопечати (модифицированный вариант устройства TSD 16-2.), печатающее алфавитно-цифровые символы с длиной строки 16 знаков;
дисплей (индикатор на жидких, кристаллах), представляющий алфавитно-цифровые символы с длиной строки до 20 знаков;
плоскую фольговую1 клавиатуру.
2. Программное обеспечение и обработка сигналов
Математическое обеспечение прибора должно удовлетворять следующим требованиям:
1) значительная часть измерений и вычислений должна идти - в реальном времени;
2) технические средства (память, объем, потребление тока) должны быть минимальны.
Исходя из этого, отказались от использования универсальной операционной системы. На языке Ассемблер для процессора Z 80 разработана программа, обеспечивающая обработку сигналов в реальном времени и вычисления после завершения измерений. Программ обработки прерывания длительностью 2,5 мс обеспечивает регистрацию данных через каждые 10 мс.
Метод измерений импеданса
Электронная схема измерения давления позволяет проводить фильтрацию аналогового сигнала датчика давления U и после выпрямления этого сигнала обеспечивать измерение эффективного напряжения Ue поступающего с датчика давления. Таким образом, сигнал мгновенного давления в пневматическом центре в виде величины Ue подается на АЦП. С помощью специальной логической схемы измеряется величина φu -φs где φu —фаза сигнала датчика давления, а φs — фазовый угол потока в насосе (т. е. измеряется и подается в АЦП сдвиг фаз между сигналом давления и сигналом положения насоса).
Метод измерений совместно с процедурой калибровки обеспечивает вычисление импеданса по этим двум измеряемым величинам. Вычисление основывается на перечисленных ниже соотношениях. 1. По определению, измеряемый импеданс Z и измеряемое давление Р. связаны соотношением:
P=Z*V,
где V — поток в пневматическом центре.
2. Регистрируемый фотоэлементом фазовый угол потока в насосе φs , и фазовый угол потока в пневматическом центре φv связаны соотношением:
φv = φs -φd
где φd — фазовый сдвиг, возникающий из-за произвольности расположения метки на маховике насоса.
3. Величина давления в пневматическом центре и сигнал датчика ![]() давления связаны через величину X — комплексную характеристику измерительной цепи.
давления связаны через величину X — комплексную характеристику измерительной цепи.
P=U*X
4. Для калибровки проводятся измерения с известным механическим импедансом Zt, при этом выполняются вышеуказанные соотношения.
Для любого измеряемого импеданса определяется параметр К, характеризующий электронную схему, через соотношение:
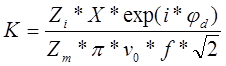
где v0 — ударный объем насоса;
f — частота осцилляции;
Zi — истинное значение импеданса;
Zm — измеренное значение импеданса.
При правильной калибровке должно быть всегда Zi=Zm.
5 Исходя из определения эффективного напряжения и ударного объема
![]()
![]()
Также легко получить следующее выражение:
![]()
Отсюда видно, что. проведя калибровку с известным импедансом Zi=Zt можно найти модуль и фазовый угол комплексного параметра К:
![]()
![]()
6. Параметры ![]() и
и ![]() характеризуют каналы измерения давления и потока и не должны зависеть от калибровочного импеданса.
характеризуют каналы измерения давления и потока и не должны зависеть от калибровочного импеданса.
7. Из вышеуказанной формулы следует, что далее в процессе исследования неизвестного импеданса его модуль Z и фаза ![]() могут быть вычислены по измеренным величинам Ueи
могут быть вычислены по измеренным величинам Ueи ![]() формулам:
формулам:
![]()
![]()
Следует подчеркнуть два обстоятельства:
1) К включает не только неизвестную комплексную характеристику измерительной системы, но и фазовый сдвиг, возникающий из-за произвольности расположения метки на маховике насоса;
2) для проведения калибровки прибора необходимо разработать метод теоретического вычисления импеданса калибровочных пневмосистем (системы трубок и/или замкнутых сосудов), подсоединяемых к пневматическому центру.
Результаты измерений
Величины ![]() и
и ![]() были измерены для 53 пневматических конструкций, состоящих из трубок и бутылей различных размеров. В таблице приведены результаты измерений.
были измерены для 53 пневматических конструкций, состоящих из трубок и бутылей различных размеров. В таблице приведены результаты измерений.
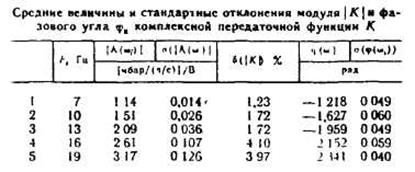
По каждой конструкции проводилось 3 измерения, результаты которых практически не различались. Далее измеренные величины ![]() и
и ![]() для каждой конструкции использовались как исходные данные для вычисления параметров таблицы. Таким образом, стандартное отклонение отражает систематическую ошибку, связанную с неадекватностью схемы установки (т.е. некоторого несоответствия формул вычисления импеданса и величин импеданса использованных пневматических конструкций). В таблице представлена также относительная ошибка модуля
для каждой конструкции использовались как исходные данные для вычисления параметров таблицы. Таким образом, стандартное отклонение отражает систематическую ошибку, связанную с неадекватностью схемы установки (т.е. некоторого несоответствия формул вычисления импеданса и величин импеданса использованных пневматических конструкций). В таблице представлена также относительная ошибка модуля ![]()
Из схемы прибора видно, что импеданс, подсоединяемый, к пневматическому центру, включает импеданс эталонной трубки, импеданс индивидуального мундштука с загубником и сеткой (в основном — сопротивление сетки), а также исследуемый импеданс. Кроме того, сам пневматический центр содержит определенный объем газа и, следовательно, представляет собой емкостной импеданс. Поэтому программное обеспечение прибора должно включать программы вычисления исследуемого импеданса по найденной величине импеданса, подключенного к центру. Эта программа должна отражать эквивалентную схему пневматической системы. Адекватная схема пневматической системы была подобрана в результате калибровки. прибора таким образом, чтобы выполнялось положение ![]() для различных величин калибровочного импеданса. В соответствии с этой схемой по известным правилам операций с комплексными импедансами вычислялась величина исследуемого импеданса Zm.
для различных величин калибровочного импеданса. В соответствии с этой схемой по известным правилам операций с комплексными импедансами вычислялась величина исследуемого импеданса Zm.
В целом определение потока по положению поршня насоса увеличивает требования к процедуре калибровки, поскольку необходимо найти адекватную схему пневматической системы. Но это усложнение компенсируется возможностью отказаться от пневмотахометра. Кроме того, отказ от пневмотахометра позволил уменьшить величину осцилляторного потока и надежно обеспечить линейность вынужденных колебаний системы дыхания.
3. Режимы измерений и вычисления параметров механики дыхания
В разработанном приборе предусмотрено 2 режима измерений и вычислений: первый режим — измерение импеданса всей системы дыхания Zrs во время спокойного- дыхания в - течение 75 с (по 15 с на каждую из пяти частот); второй режим—измерение импеданса верхних воздухоносных путей Zuaw во время задержки дыхания — пробы Вальсальвы в течение 30 с (по 6 с на каждую частоту). Во время пробы Вальсальвы надгортанник перекрывает, вход в трахею, поэтому измеряется импеданс верхних дыхательных путей от носовой полости до гортани. Импеданс верхних дыхательных путей Zuam и импеданс нижележащего участка системы дыхания Z1 соединены параллельно. По величине Zrs и Zuam в соответствии с известными правилами операций с комплексными числами вычисляется Z1 который является импедансом системы дыхания, скорректированным на величину импеданса верхних дыхательных путей.
Далее по найденным величинам импеданса определяются следующие параметры осцилляторной механики дыхания: сопротивление R, инерционность и растяжимость С. Сопротивление вычисляется как средняя величина реальных частей импедансов на пяти частотах, инерционность и растяжимость — методом наименьших квадратов по зависимости мнимой части импеданса от частоты.
Вывод
Разработанный прибор позволяет быстро (за 2 мин) найти механические импедансы системы дыхания, верхних дыхательных путей системы дыхания с коррекцией на верхние дыхательные пути на частотах 7, 10, 13, 16, 19 Гц, а также вычислить следующие параметры осцилляторной механики дыхания: сопротивление, растяжимость, инерционность.
Метод измерений совместно с процедурой калибровки обеспечивает вычисление импедансапо измеряемым величинам эффективного напряжения от датчика давления и сдвигу фаз междусигналом давления и сигналом потока.
Процедура калибровки позволяет определитькомплексную характеристику прибора с точностью не менее 5%по модулю и 0,06 рад по углу.
Благодаря конструктивным (отдельный осцилляторный блок) и программным особенностям(программная компенсация импеданса верхних дыхательных путей) концепцию прибора можно применять в специфических условиях, где испытуемый сам работает с прибором и(или) подвергается действию повышенных или пониженных давлений. Прибор можно рекомендовать и для использования в пульмонологических клиниках.
Перечень литературы
1. Баранов В. М., Дьяченко А. И. Ц Успехи физиол. наук.— 1991.— № 3.— С. 25—40.
2. Зильбер Н. А. Современные проблемы клинической физиологии дыхания.— Л., 1987.— С. 34—44.
8-09-2015, 23:05