«Всего несколько лет назад разговоры ороботах, доставляющих лекарства в определенные точки организма, казались фантазиями, - говорит Алексей Снежко, физик из Аргоннской национальной лаборатории (США). - Теперь понятно, что в самое ближайшее время их начнут испытывать на людях».
Как это будет выглядеть, понятно уже сейчас. В одном из последних опытов Сильван Мартель и его коллеги ввелибактериив организм больной раком крысы. А затем поместили ее в медицинский томограф. Эти приборы используют сильные магнитные поля для построения трехмерных карт организма пациента. После небольшой переделки установка превратилась в командный пункт для микробов. С ее помощью ученые провелибактериипо кровеносной системе грызуна прямо в район опухоли. Микроорганизмы доставили к пораженной области учебный груз - флуоресцирующее вещество. Вскоре Мартель планирует повторить эксперимент. На этот раз бактерии будут нести противоопухолевый препарат.
Так же нанотехнологи продемонстрировали довольно впечатляющие образцы электронной кожи. Электронная кожа впервые ощутила прикосновения бабочки
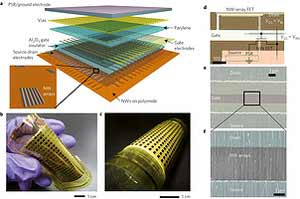
Решётка из тончайших полупроводниковых нитей, совмещённая с электродами и меняющей в ответна давление проводимость резиной типа PSR (вверху) превращена калифорнийскимиумельцами в "лоскут кожи" (внизу)(иллюстрации Kuniharu Takei et al./Nature Materials).
На этом рисунке кожи робота каждый чёрный квадратик соответствует одному "пикселю", элементарной точке, отвечающей за осязание (иллюстрация Ali Javey and Kuniharu Takei, UC Berkeley).Чувствительность кожи авторы рекламируют красочной фантазией: робот с такимманипулятором смог бы запросто обращаться с куриным яйцом, не уронив его и не раздавив (иллюстрация Ali Javey, Kuniharu Takei/UC Berkeley).

Ещё одна иллюстрация чувствительности стэнфордского сенсора: он регистрирует прикосновения перуанской бабочкиChorinea faunus(фото L.A. Cicero/Stanford University).
Уже немало копий сломано вокруг проблемы создания робототехнического аналога самого крупного органа человека. Главный вопрос – как воспроизвести невероятную чувствительность кожного покрова, который может ощутить дуновение ветерка от пролетевшего насекомого? Недавно две исследовательские группы из Калифорнии одновременно объявили о своих впечатляющих ответах.
Первая команда, из Калифорнийского университета в Беркли, выбрала в качестве ключевого элемента для своей искусственной кожи нанопроводки. Как сообщают учёные впресс-релизе, они вырастили крошечные германиевые и кремниевые нити на специальном барабане, а затем прокатили этим валиком по подложке – клейкойполиимиднойплёнке.
В итоге учёные получили эластичный материал, в структуру которого были включены нанопроводки, играющие роль транзисторов.
Поверх них исследователи нанесли изолирующий слой с периодическим рисунком из тонких отверстий, а ещё выше – чувствительную к прикосновению резину (PSR).Между резиной и нанопроводками при помощи фотолитографии навели проводящие мостики (для этого и понадобились отверстия в слое изолятора) и, наконец, сдобрили бутерброд тонкой алюминиевой плёнкой – финальным электродом. (Подробности авторы системы представили встатьев Nature Materials).Такой эластичный набор способен определять и точно локализовать участки, к которым прикладывается давление.Имя эта кожа получила банальное и предсказуемое — e-skin. Новая технология позволяет использовать в качестве подложки множество материалов, от пластика до резины, а также включать в её состав молекулы различных веществ, например, антибиотиков (что может оказаться весьма важным).На опытном куске e-skin размером 7 х 7 сантиметров уместилась матрица 19 х 18 пикселей. В каждом из которых содержались сотни наноштырей. Такая система оказалась способна регистрировать давление от 0 до 15 килопаскалей.Примерно такие уровни нагрузки испытывает человеческая кожа при печатании на клавиатуре или удерживании на весу небольшого объекта.

Али Джавей (Ali Javey), глава проекта e-skin в Беркли(фото UC Berkeley)
Учёные указывают на вполне определённое преимущество своей разработки перед аналогами. Большинство проектов такого рода полагается на гибкие органические материалы, которым для работы требуется высокое напряжение.
Синтетическая кожа из Беркли — первая, изготовленная на основе монокристаллических неорганических полупроводников. Она функционирует при напряжении всего в 5 вольт. Но что ещё интереснее — опыт показал, что e-skin выдерживает до 2000 изгибаний с радиусом 2,5 миллиметра без потери чувствительности.
В качестве очевидной области применения в будущем такой кожи можно предположить чувствительные манипуляторы,способные оперироватьхрупкими предметами.
Сверхаккуратную кибернетическую руку можно дополнительно оснастить датчиками тепла, радиоактивности, химических веществ, покрыть тонким слоем лекарств и использовать на "пальцах" роботов-хирургов или спасателей.
В последнем случае (при работе роботов с людьми) очень важным с точки зрения безопасности окажется тот факт, что электронная кожа из Беркли, как и человеческая, ощущает прикосновение почти мгновенно (в течение миллисекунд). В теории она может полностью покрывать манипулятор робота или даже всю машину.
Вверху: профессор Чжэнань Бао (Zhenan Bao) – лидер стэнфордского проекта.Внизу: такая простая полимерная плёнка с алюминиевыми проводниками послужила отправной точкой в построении новой кожи(фото L.A. Cicero/Stanford University, Stefan C. B. Mannsfeld et al./Nature Materials).
Вторая разработка, родом из Стэнфордского университета, использует другой подход. Как сообщают учёные впресс-релизе, они поместили между двумя электродами слой высокоэластичной формованной резины.
Такая плёнка накапливает электрические заряды подобно конденсатору. Давление сжимает резину – а это, в свою очередь, изменяет число электрических зарядов, которые способен хранить сандвич, что и определяет электроника благодаря набору электродов.
Описанный процесс позволяет обнаружить легчайшее прикосновение, что учёные доказали на опыте. Они использовали в качестве "тестера" мух.В ходе эксперимента квадратная матрица со стороной в семь сантиметров и в миллиметр толщиной чувствовала посадку насекомых, весящих всего 20 миллиграммов, и реагировала на их касания с высокой скоростью.
Под микроскопом матрица похожа на поле, усеянное остроконечными пирамидками. В таком материале пирамидок этих может быть от сотен тысяч до 25 миллионов на квадратный сантиметр, в зависимости от требуемого пространственного разрешения.
Такой приём (вместо применения сплошного слоя резины) был необходим, поскольку монолитный материал, как выяснилось, терял свои свойства при сдавливании – точность регистрации зарядов падала. А свободное пространство вокруг микроскопических пирамид позволяет им легко деформироваться и восстанавливать исходную форму после снятия нагрузки.
Гибкость и прочность стэнфордской электронной кожи оказались очень высоки. Её нельзя растягивать, но вполне можно сгибать, обернув ею, например, руку робота.
Авторы электронной кожи из Стэнфорда, чьястатьятакже вышла в Nature Materials, отмечают, что достоинства их технологии — дешевизна и широкий диапазон давлений, который способен измерять подобный бутерброд.
А потому в качестве сфер приложения своей разработки учёные видят опять же хирургических роботов. Но не только. Искусственная кожа могла бы стать основой электронных бинтов, — рассуждают американские исследователи, — способных подавать сигнал при слишком слабом или опасно сильном затягивании. А ещё подобные сенсоры могли бы точно фиксировать степень сжатия руками рулевого колеса, вовремя предупреждая водителя, что он засыпает.
Обе команды утверждают, что ещё продолжат развивать данное направление экспериментов. Так что роботы будущего, по всей видимости, всё же получат кожу, приближённую по возможностям к человеческой. И пусть внешне она будет заметно отличаться от нашей – её чувствительность придаст новый смысл понятию робот-андроид.
Сенсационное заявление дала компания по производству видеокарт для компьютеров. Не успели написать о первой хирургической операции, проведенной исключительно «руками» роботов, как NVIDIA приготовила другую «бомбу» из мира медицины. На калифорнийской конференции GTC 2010 производитель графических чипов озвучил весьма смелую идею – проводить операцию на сердце… без остановки сердца и вскрытия грудной клетки!
Робот-хирург будет производить операцию с помощью манипуляторов, подведенных к сердцу через небольшие отверстия в груди пациента. Технология визуализации «на лету» оцифровывает бьющееся сердце, демонстрируя хирургу трехмерную модель, по которой он может ориентироваться точно так же, как если бы смотрел на сердце через вскрытую грудную клетку.Основная сложность заключается в том, что сердце совершает большое количество движений за короткое время – но, по словам разработчиков, мощности современных вычислительных систем на базе графических процессоров NVIDIA хватит, чтобы визуализировать орган, синхронизируя движения инструментов робота с биением сердца. За счет этого создается эффект неподвижности – хирургу без разницы, «стоит» сердце или работает, ведь манипуляторы робота совершают аналогичные движения, компенсируя биение!
Пока вся информация об этой невероятной технологии состоит из коротенькой видеодемонстрации, но мы будем с нетерпением ожидать новых сведений от NVIDIA. Кто бы мог подумать, что совершить революцию в хирургии задумала компания-производитель видеокарт…
А Японские умельцы не перестают удивлять приятными новинками. Новый робот-медвежонок носит людей на руках

Японцы остановились на "благоприятном имидже плюшевого медвежонка", посчитав, что человекоподобный робот будет только пугать пациентов (фото RIKEN, Tokai Rubber Industries)
Японский институт физических и химических исследований (BMC RIKEN) и компанияTokai Rubber Industries(TRI)вчера [26.08.09]представили "медвежеподобного" робота, предназначенного для оказания помощи медсёстрам в больницах. Новая машина буквально носит пациентов на руках.
RIBA (RobotforInteractiveBodyAssistance) — это усовершенствованная версия андроида RI-MAN.
<...> По сравнению с предшественником RIBA серьёзно продвинулся вперёд.
Как и RI-MAN, новичок способен аккуратно поднимать человека с кровати или инвалидного кресла, переносить его на руках, например в туалет, а потом доставлять обратно и так же бережно укладывать в постель или усаживать в коляску. Но если RI-MAN носил лишь зафиксированных в определённом положении кукол весом 18,5 кг,RIBA уже транспортирует живых людей массой до 61 кило.
Рост "медведя" 140 сантиметров (RI-MAN — 158 см), и весит он вместе с аккумуляторами 180 килограммов (предшественник — 100 кг). RIBA распознаёт лица и голоса, выполняет голосовые команды, ориентируется по собранным видео- и аудиоданным, которые обрабатывает в 15 быстрее, чем RI-MAN, и "гибко" реагирует на малейшие изменения в окружающей среде.
Руки нового робота имеют семь степеней свободы, голова — одну (позже будет три), в талии две степени.Корпус покрыт разработанным TRI новым мягким материалом наподобие полиуретановой пены. Двигатели работают довольно тихо (53,4 дБ), а всенаправленные колёса позволяет машине маневрировать в ограниченном пространстве.
Ну и само собой без протезирования в медицине никуда. Поэтому и здесь есть свои ученые и инженеры безустально разрабатывающие новые устройства. А именно Лаборатория прикладной физики им. Д. Хопкинса преподнесла новый сюрприз. В ходе совместной реализации проекта DARPA и Лаборатория прикладной физики им. Д. Хопкинса (Johns Hopkins Applied Physics Laboratory, APL) подготовили к началу тестирования с участием людей очередное поколение протеза руки, названное Modular Prosthetic Limb (MPL). По задумке разработчиков, искусственная конечность будет полностью управляться мозгом посредством вживленных в него сенсоров и даже обеспечивать тактильные ощущения за счет посылки электрических импульсов с внешних сенсоров в соответствующий участок коры головного мозга. В прошлом месяце APL заявила о заключении контракта на 34,5 млн долл. с DARPA, что должно позволить исследователям провести тестирование своей разработки на пяти особах в течение следующих двух лет.

Ожидается, что третья фаза тестирования – испытания с участием людей – позволит внести усовершенствования как в систему управления нейропротезом, так и в алгоритм генерации сигналов обратной связи. MPL, прошедший стадию многолетнего прототипирования, поддерживает 22 разновидности движений, независимое управление каждым пальцем и весит столько же, сколько и настоящая человеческая рука (около 4 килограммов). Исследователи планируют начать тестирование, оснастив протезом парализованного пациента. Реализованные до сих пор нейропротезы были рассчитаны на замену ампутированным конечностям, в то время как MPL позволяет охватить большее количество случаев, включая недуги, связанные с нарушениями нормальной деятельности спинного мозга, поскольку сигналы управления «снимаются» непосредственно с головного мозга.В ходе совершенствования разработки исследователям предстоит решить еще немалое количество затруднений и сложностей, как уже известных, так и тех, которые, несомненно, будут выявлены в процессе тестирования. Среди подобных проблем – малый срок жизни существующих на сегодняшний день нейроинтерфейсов. Внедренные в жидкие ткани организма кремниевые чипы достаточно интенсивно разрушаются, выходят из строя и нуждаются в замене приблизительно каждые два года. Ранее в этом году DARPA анонсировала программу Histology for Interface Stability Over Time, задачей которой названо увеличение срока службы нейроимплантатов до 70 лет.Хотя основными партнерами по разработке значатся APL и DARPA, к процессу исследований привлекается также множество других учреждений. Так, например, Питсбургский университет уже выполнил работы по вживлению обезьянам имплантатов, позволяющих контролировать руки робота, Калифорнийский технологический институт поможет в разработке дизайна интерфейса мозг-компьютер, а Университет Чикаго поучаствует в реализации системы тактильных датчиков.
Постепенно будут внедрены и роботы помощники, задачей которых будет непосредственная помощь врачам, данные модели уже используются в некоторых клиниках зарубежной медицины. Yurina, робот от японской компании Japan Logic Machine, который способен переносить лежачих пациентов на манер больничной каталки, только гораздо более плавно.

Что еще интереснее, Yurina может трансформироваться в инвалидное кресло, управляемое с тачскрина, контроллера или голосом. Робот достаточно ловок, чтобы перемещаться в узких коридорах, что делает его действительно неплохим помощником для настоящих врачей.Отдельно стоит упомянуть видеодемонстрацию, которую обязательно стоит смотреть с включенным звуком. Чем руководствовались режиссеры ролика, сопровождая видеоряд такой зловещей музыкой, мы не узнаем никогда – однако сочетание «доброго робота» и совершенно неуместной звуковой дорожки точно обеспечит вам порцию здорового смеха.
Приятной новостью стало изобретение роботизированных инвалидных кресел, с помощью специальных датчиков этим креслом управлять гораздо удобнее, однако новинка требует неких доработок, которые в ближайшем будущем и будут осуществлены.
Одним из самых приятных дней в жизни собаковода можно считать такой, когда четвероногий любимец полностью освоит следование за хозяином и будет сопровождать его всегда и везде, не требуя постоянного одергивания поводком. А благодаря стараниям команды ученых из Университета Саитамы (Saitama University) подобную концепцию теперь можно применять и к… инвалидным креслам.
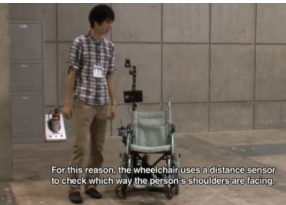
Роботизированное кресло несет на борту камеру и датчик определения расстояния, с помощью чего система отслеживает положение плеч человека, идущего рядом с креслом. За счет этих устройств кресло «понимает», в каком направлении двигается человек, соответственно повторяя его путь. Для сидящего в кресле такой способ перемещения получается более приятным, поскольку инвалидное кресло движется плавно, а не толкается вперед спутником.
Робо-кресло способно также огибать препятствия, правда, до определенной степени. Идея, несомненно, хороша, однако требует некоторой доработки. Представьте такую ситуацию: человек сидит в кресле, а помощник в это время с кем-то оживленно беседует и жестикулирует (соответственно, совершая движения туловищем, плечами и руками). Неужели кресло будет все время «елозить» из стороны в сторону, повторяя движения плеч помощника? Создателям определенно есть над чем поработать.
Заключение
Значение роботов – помощников для человека.
Роботы помощники играют огромную роль в современной медицине. Эта отрасль еще достаточно молода и находится на начальном этапе развития, но, несмотря на это некоторые разработки введены уже во всем мире, они успешно функционируют и приносят незаменимую помощь сотрудникам медицинских учреждений. Главная проблема по моему мнению, что если в развитых странах с устойчивой положительной экономикой эти нововведения будут введены сразу после официальной массовой роботизации, то в развивающихся странах они поступят гораздо позже, а в странах третьего мира эти разработки весьма запозднятся и в ближайшем будущем там точно не будет этих уникальных разработок. Дело в том, что вся эта продукция очень дорогостоящая и для ее покупки нужны будут немалые финансирования, которые далеко не всем странам по плечу. Поэтому в будущем нужно поставить вопрос о снижение стоимости данной аппаратуры в пределах разумного, при помощи определенных конференций и заседаний глав правительств.
9-09-2015, 00:34