Общие сведения
Процесс управления можно разделить на несколько этапов:
Сбор и обработка информации.
Анализ, систематизация, синтез.
Постановка на этой основе целей. Выбор метода управления, прогноз.
Внедрение выбранного метода управления.
Оценка эффективности выбранного метода управления
Имеются следующие наиболее общие подходы к теории управления:
Процессный подход основывается на идее существования некоторых универсальных функций управления.
Системный подход сложился на базе общей теории систем: система — это некая целостность, состоящая из взаимозависимых подсистем, каждая из которых вносит свой вклад в функционирование целого.
Ситуационный подход рассматривает любую организацию как открытую систему, постоянно взаимодействующую с внешней средой, следовательно, и главные причины того, что происходит внутри организации, следует искать вне её, то есть в той ситуации, в которой она реально функционирует.
Универсальный подход сложился на базе научной школы Универсологии, теории Универсального управления, теории переходных процессов, теории относительности сознания, и рассматривает любую систему в совокупности ее вертикальных и горизонтальных связей.
Субстратный подход, основанный на структурной оптимизации стратегии и принимаемых решений посредством выявления субстратов (ключевых моментов эффективности) в значимых классах информационного контекста управленческой ситуации. Процесс построения такой структурно-субстратно-оптимальной стратегии называют структурной оптимизацией.
Примеры современных методов управления:
Нелинейное управление
Теория катастроф
Адаптивное управление
Построение оптимальных робастных регуляторов
Игровые методы в управлении
Интеллектуальное управление
10) Математические модели систем управления Основные термины математического моделирования. Уточним определения основных терминов математических моделей:
- компоненты системы, которые могут быть вычленены из нее и рассмотрены отдельно;
- независимые переменные, это внешние величины, которые могут изменяться и не зависят от процессов в системе;
- зависимые переменные, значения этих переменных есть результат воздействия на систему независимых внешних переменных;
- управляемые переменные, значения которых могут изменяться пользователем;
- эндогенные переменные, их значения определяются в ходе деятельности внутренних компонент системы;
- экзогенные переменные определяются пользователем и действуют на систему извне.
Построение моделей. При построении любой модели процесса управления желательно придерживаться следующего плана действий:
Сформулировать цели изучения системы.
Установить наиболее существенные для данной задачи факторы, компоненты и переменные.
Учесть тем или иным способом посторонние, не включенные в модель факторы.
Осуществить оценку результатов, проверку модели, оценку полноты модели.
Виды моделей. Модели можно делить на следующие виды:
1) Функциональные модели - выражают прямые зависимости между эндогенными и экзогенными переменными.
2) Модели, выраженные с помощью систем уравнений относительно эндогенных величин.
3) Модели оптимизационного типа. Основная часть модели - система уравнений относительно эндогенных переменных. Цель - найти оптимальное решение для некоторого показателя.
4) Имитационные модели - весьма точное отображение процесса или явления. Математические уравнения при этом могут содержать сложные, нелинейные, стохастические зависимости
16—17 Статические и динамические характеристики элементов и систем
1. Статические и динамические модели
По признаку учета зависимости объекта моделирования от времени различают статические и динамические характеристики систем, отражаемые в соответствующих моделях.
Статические модели (модели статики) отражают функцию системы - конкретное состояние реальной или проектируемой системы (своего рода его «мгновенную фотографию»)
Примеры. Закон Ома, описание показателей эффективности организацией в некоторый момент времени.
Динамические модели (модели динамики) отражают функционирование системы - процесс изменения состояний реальной или проектируемой системы. Они показывают различия между состояниями, последовательность смены состояний и развитие событий с течением времени.
Примеры. Описание процесса изменения спроса на какой-либо товар под влиянием рекламы, изменение температуры электроплиты при ее включении, описание процесса изменения показателей эффективности за некоторый период времени.
Отличие статических и динамических моделей заключено в учете времени: в статике его как бы не существует, а в динамике это основной элемент.
2. Статические характеристики систем
В узком смысле к статической характеристике системы можно отнести ее структуру. Однако нас чаще будут интересовать свойства системы по преобразованию ходов и выходов (т.е. функция системы) в установившемся режиме, когда отсутствуют изменения значений как входных, так и выходных переменных. Такие свойства определяются как статические характеристики.
Статическая характеристика - это зависимость между входной и выходной величинами в установившемся режиме. Статическая характеристика может быть представлена:
o математической моделью вида Y = F(X)
3. Динамические характеристики систем
Следующий шаг в исследовании систем состоит в том, чтобы понять и описать, как система «работает», что происходит с ней самой и с окружающей средой в ходе реализации поставленной цели. Для описаний функционирования системы используются динамические модели.
Для разных объектов и систем разработано большое количество динамических моделей, описывающих процессы с различной степенью детальности: от самого общего понятия динамики, движения вообще, до формальных математических моделей конкретных процессов типа уравнений движения в механике или волновых уравнений в теории поля. Свойства динамических систем определяет динамические характеристики.
Динамическая характеристика - это реакция системы на возмущение (зависимость изменения выходных переменных входных и от времени).
12) Операторы преобразования переменных
Оператор стационарен, если его характеристики инвариантны ко времени
Описание объекта множеством равновероятных операторов содержит неопределенность. Если параметры модели заданы с точностью до интервалов значений, то о таких системах говорят, что они интервальные.
Оператор может быть детерминированным или стохастичным. В случае стохастичных операторов параметры представляются как случайные величины и задаются их вероятностные характеристики.
Объекты управления могут быть с сосредоточенными или распределенными параметрами. В последнем случае они описываются уравнениями в частных производных (разностях).
13) Классы моделей
Модель объекта или системы управления принадлежит тому же классу, что и описывающий их оператор преобразования. Выделяют следующие признаки классов систем с непрерывным и дискретным временем:
• линейные Л или нелинейные Л;
• стационарные С или нестационарные С;
• детерминированные Д или стохастичные Д;
• сосредоточенные (конечномерные) К или распределенные (бесконечномерные) К.
Эти четыре независимых признака биальтернативны, поэтому можно насчитать всего 24 = 16 классов непрерывных и столько же дискретных систем.Простейший класс – ЛСДК – линейные стационарные детерминированные конечномерные системы. Они имеют форму обыкновенных линейных дифференциальных (разностных) уравнений с постоянными детерминированными коэффициентами. Математика разработала весьма развитый аппарат анализа этого класса систем.
Более сложные классы операторов получаются при введении одного из альтернативных признаков:
ЛСДК; ЛСДК; ЛСДК; ЛСДК.
Для таких систем существует незначительное число общих методов аналитического исследования, разработанных только для частных случаев. Операторы второго уровня сложности получаются введением двух отрицаний:
ЛСДК; ЛСДК; ЛСДК; ЛСДК; ЛСДК; ЛСДК.
При трех отрицаниях получаем операторы третьего уровня сложности:
ЛСДК; ЛСДК; ЛСДК; ЛСДК.Операторы четвертого уровня сложности – ЛСДК – нелинейные нестационарные стохастичные бесконечномерные. Им соответствуют нелинейные дифференциальные уравнения в частных производных с переменными случайными параметрами.
14) Автономные системы
Система называется автономной, если на нее не действуют внешние силы, в том числе параметрического типа. Автономные системы, таким образом, стационарны. Изменение их состояния происходит в силу накопленной ранее энергии. На рис.2 модель среды представлена в виде автономной системы, имеющей выходы, но не имеющей входов. Движения автономной системы называют свободными.
Дифференциальные уравнения автономных систем включают переменные системы и их производные, но не содержат переменных, описывающих воздействия среды, и имеют постоянные параметры. Это так называемые однородные дифференциальные уравнения
![]() ,
,
дополняемые начальными условиями ![]()
Начальные условия являются следствием предыстории системы и вместе с дифференциальными уравнениями полностью определяют поведение автономной системы. В случае автономных систем с дискретным временем будем иметь однородные разностные уравнения:
![]() .
.
18) Передаточные функции звена
. Передаточная функция звена
Ее определение дается на основе преобразования Лапласа. Рассмотрим динамическое звено (рис.2.4), описываемое дифференциальным уравнением
|
Рис. 2.4 |
Определение. Передаточной функцией звена W(S) называется отношение изображений Лапласа выходной и входной величин при нулевых начальных условиях.

где xвх (t) - входная величина; xвых (t) - выходная величина.
Правая часть уравнения (2.25) характеризует воздействие, поданное на вход. Левая часть, приравненная к нулю, характеризует свойства самого звена, его свободное движение. Порядок уравнения определяет число степеней свободы звена.
Формально передаточную функцию звена можно составить как отношение операторных многочленов левой и правой частей уравнения звена и, наоборот, зная передаточную функцию, легко написать уравнение звена.
53) Сущность метода имитационного моделирования
При имитационном моделировании воспроизводится алгоритм функционирования системы во времени — поведение системы, причем имитируются элементарные явления, составляющие процесс, с сохранением их логической структуры и последовательности протекания, что позволяет по исходным данным получить сведения о состояниях процесса в определенные моменты времени, дающие возможность оценить характеристики системы.
Логометр
Логометр
(от греч. lógos — слово, здесь — отношение и ...метр
механизм приборов для измерения отношения сил двух электрических токов. Принцип действия Л. основан на том, что направленные встречно вращающие моменты, возникающие вследствие воздействия на подвижную часть Л. величин, входящих в измеряемое отношение, уравновешиваются при отклонении подвижной части на некоторый угол. Например, подвижную часть магнитоэлектрического Л. образуют две скрепленные под углом рамки, токи к которым подводятся через безмоментные спирали (рис., а). Находясь в поле постоянного магнита, рамки стремятся повернуться в направлении действия большего момента, и подвижная часть отклоняется до тех пор, пока моменты не уравновесятся. Л. широко применяются в различных схемах для измерения электрических величин: ёмкости, индуктивности, сопротивления. Например, при использовании Л. в Омметре (рис., б) угол α, на который отклоняется подвижная часть Л., зависит только от отношения сил токов I1 и I2,
;
т. e. при постоянных r0 и r1 отклонение подвижной части пропорционально измеряемому сопротивлению; шкала Л. градуируется непосредственно в омах (ом). Широко распространены также Л. электродинамических и ферродинамических систем.
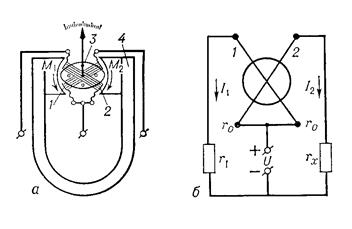
устройство магнитоэлектрического логометра (а) и схема омметра с магнитоэлектрическим логометром (б): M1, M2 — вращающие моменты; l1, I2 — токи в цепях омметра; U — источник питания; r0 — сопротивление рамок логометра; r1 — омическое сопротивление; rx — измеряемое сопротивление; 1, 2 — рамки логометра; 3 — сердечник; 4 — постоянный магнит.
33 - 37 Следящие системы
системы автоматического регулирования (управления), воспроизводящие на выходе с определенной точностью входное задающее (управляющее) воздействие. Функционально необходимыми элементами. Следящими системами являются датчик сигнала, усилительно-преобразующие устройства, исполнительное устройство, объект управления и обратная связь. Широко применяются в РЛС сопровождения подвижных целей, системах наведения и т. д. Важным свойством следящей системы является возможность ее дистанционной работы, при которой объект управления может находиться на значительном удалении от датчика сигнала, а его контролируемые параметры и сигналы управления передаются по линиям связи.
41 Датчики температуры
Газовые и жидкостные термометры — являются первыми приборами подобного рода. Принцип работы термометров основан на свойстве жидкости расширяться при повышении температуры. Жидкостные термометр чаще всего изготавливаются с наполнением спиртом или ртутью. Для измерения аномальных температур используются галлий или неон. Переход вещества из жидкого состояния в газообразное используется в газовых термометрах. При давлении расширяющегося газа на мембрану, происходит замыкание необходимого электроконтакта.
Кремниевые температурные датчики — их работа основана на зависимости сопротивления полупроводника «кремний» от температуры. Рабочих диапазон данных приборов находится в пределах -50°С до +150°С., в котором они показывают отличные эксплуатационные характеристики. У кремниевых датчиков температуры нет проблем с калибровкой, а также с совместимостью с различными типами выходных интерфейсов. Идеально подходя для промера температуры внутри электронной техники. Рабочий диапазон жидкостных и газовых термометров широк — от -200°С до +500°С. Наиболее часто данный тип датчиков температур применяется для визуального контроля в холодильном оборудовании и нагревательных приборах.
Датчики температуры биметаллические — название отражает особенности конструкции. Этот тип измерительных приборов основан на двух скрепленных пластинах различных металлов. Принцип работы основан на различных значениях коэффициента температурного расширение при одинаковой температуре. Пластинки металлов изгибаются при изменении температурного окружения, посредством чего влияют на контакт или на измерительную стрелку. Рабочий диапазон биметаллических датчиков температуры — от -40°С до +550°С. Лучше всего они подходят для снятия значений температуры в поверхности твердых тел. Популярны они из-за своей низкой цены и повышенной надежности. Широко используются в автомобилестроении, нагревательных и отопительных системах.
Термические индикаторы — специальные вещества, меняющие свой цвет в зависимости от изменения температуры. Цветовое изменение в термоиндикаторах может быть обратимым и необратимым. Обратимые индикаторы применяются для измерения комнатной температуры, а необратимые — в морозильных системах в промышленности и на транспорте. Недостаток подобных индикаторов — в их одноразовости. Преимущество — в дешевизне.
Термисторы — высокочувствительные датчики температуры, принцип действия которых основан изменении электросопротивления в зависимости от рост роста или снижения температуры. В качестве полупроводников обычно используют металлические оксиды. Недостатком термисторов является значительная нелийнейность и отсутствие стандартного технического регламента, а преимуществом — низкая цена на эти датчики температуры. К тому же они могут производится в миниатюрных корпусах, что повышает их быстродействие. Термисторы бывают с положительными и отрицательными температурными коэффициентами — это означает, что у первых с повышением температуры сопротивление возрастает, а у вторых, наоборот — падает.
Термопары — конструкция этих датчиков температуры состоит из двух проволок различных металлов, которые сварены между собой на одном конце. Еще с 19 века известно, что если соединить между собой для разнородных проводника в замкнутый контур и поддерживать места сцепки проволок между собой при различных температурах, то по такой электроцепи будет течь постоянный ток. Позднее были определены пары подходящих для этих целей металлов: аллюмель — хромель, константан — медь, константан — железо, рений — вольфрам, родий/платина — платина.
Инфракрасные датчики температуры (пирометры) — необходимы для измерения температуры какой-либо поверхности на расстоянии. Отсутствие непосредственного контакта с объектом при измерении его температуры, например, крайне важно при производстве полупроводников и в фармацевтической промышленности. Работа пирометров основана на эффекте излучения электромагнитных волн неким нагретым телом. Низкие температуры дают инфракрасное излучение, а высокие — видимое человеческим глазом излучение. Важными «плюсами» подобных инфракрасных датчиков температуры являются: малое время отклика, измерение температур движущихся объектов, а также снятие показаний из опасных для жизни и труднодоступных мест.
Термометры сопротивления — эти датчики температуры представляют их себя медные, никелевые или платиновые резисторы. Данные контрольно-измерительные приборы могут быть изготовлены из проволоки, либо по технологии напыления слоя металла на изоляционную подложку из стекла или керамики. Различные металлы используются в термометрах сопротивления для различных целей. Так, никель применяется в недорогих моделях датчиков температуры, предназначенных для измерений «комнатных» диапазонов, медь — для низких температур, а платина — в случае необходимости получения точных результатов. В отличие от медных и никелевых, платиновые термометры сопротивления стандартизированы, что позволяет их использовать в сложных производственных системах. Измерительный диапазон платиновых датчиков температуры от -180°С до +600°С. Существенным ограничением в использовании термометров сопротивления является их низкая ударопрочность и отсутствие защиты от вибрации.
42) Мембранные датчики давления
Датчик давления — устройство, физические параметры которого изменяются в зависимости от давления измеряемой среды (жидкости, газы, пар). В датчиках давление измеряемой среды преобразуется в унифицированный пневматический, электрический сигналы или цифровой код.
1.1 Тензометрический метод
Чувствительные элементы датчиков базируются на принципе измерения деформации тензорезисторов, припаянных к титановой мембране, которая деформируется под действием давления.
1.2 Пьезорезистивный метод
Основаны на интегральных чувствительных элементах из монокристаллического кремния. Кремниевые преобразователи имеют высокую временную и температурную стабильности. Для измерения давления чистых неагрессивных сред применяются, так называемые, Low cost — решения, основанные на использовании чувствительных элементов либо без защиты, либо с защитой силиконовым гелем. Для измерения агрессивных сред и большинства промышленных применений используется преобразователь давления в герметичном металло-стеклянном корпусе, с разделительной диафрагмой из нержавеющей стали, передающей давление измеряемой среды посредством кремнийорганической жидкости.
1.3 Ёмкостной метод
Ёмкостные преобразователи используют метод изменения ёмкости конденсатора при изменении расстояния между обкладками. Известны керамические или кремниевые ёмкостные первичные преобразователи давления и преобразователи, выполненные с использованием упругой металлической мембраны. При изменении давления мембрана с электродом деформируется и происходит изменение емкости. В элементе из керамики или кремния, пространство между обкладками обычно заполнено маслом или другой органической жидкостью. Недостаток — нелинейная зависимость емкости от приложенного давления.
1.4 Резонансный метод
В основе метода лежат волновые процессы: акустические или электромагнитные. Это и объясняет высокую стабильность датчиков и высокие выходные характеристики прибора. К недостаткам можно отнести индивидуальную характеристику преобразования давления, значительное время отклика, невозможность проводить измерения в агрессивных средах без потери точности показаний прибора.
1.5 Индуктивный метод
Основан на регистрации вихревых токов (токов Фуко). Чувствительный элемент состоит из двух катушек, изолированных между собой металлическим экраном. Преобразователь измеряет смещение
29-04-2015, 05:15