Кубанский государственный технологический университет
Кафедра автоматизации технологических процессов
Задание на контрольную работу
По дисциплине “Автоматизированное управление дискретными процессами” для студентов заочной формы обучения специальности 21.01 — “Автоматика и управление в технических системах” на тему: “Синтез управляющего автомата модели LEGO — “транспортная тележка” и моделирование её движения вдоль трассы”
 |
Выдано:
Аспирантом каф. АПП 06.09.99 /Напылов Р.Н./
студенту гр. ____________ /____________/
Краснодар 1999
1 Исходные данные
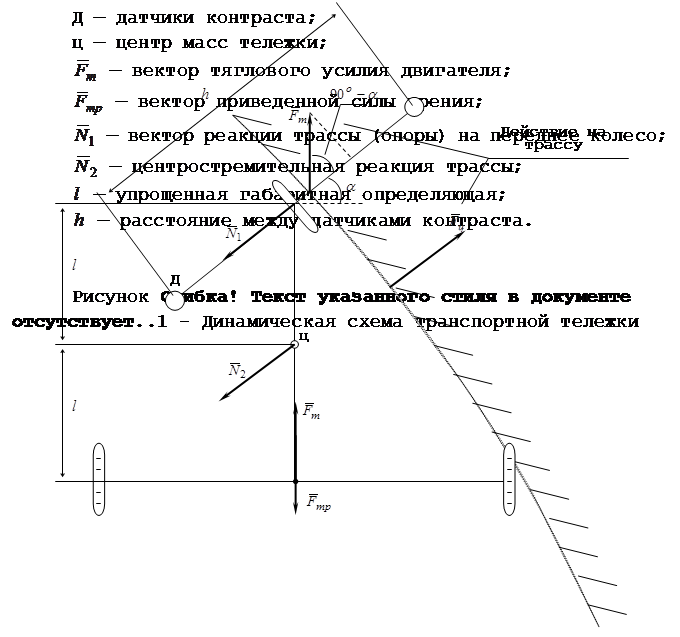
1.1 Управляемый процесс — движение модели LEGO транспортной тележки вдоль заданной траектории в виде белой полосы. Ориентация тележки относительно трассы регулируется датчиками контраста.
1.2 Условная схема транспортной тележки приводится на рисунке 1.1. Тележка движется за счёт заднего привода, создающего постоянное тягловое усилие  . Вращение переднего колеса тележки осуществляется с помощью реверсивного поворотного двигателя, отрабатывающего с постоянной угловой скоростью
. Вращение переднего колеса тележки осуществляется с помощью реверсивного поворотного двигателя, отрабатывающего с постоянной угловой скоростью  , где
, где  — угол поворота переднего колеса (рисунок 1.1)
— угол поворота переднего колеса (рисунок 1.1)
1.3 Транспортная тележка, как объект управления имеет систему дискретных входных и выходных сигналов, структурно представленную на рисунке 1.2. Кодировка указанных сигналов следующая:
Таблица 1.1 – Кодировка управляющих сигналов
Разряд сигнала X |
Управляющее действие |
| X0 | 1 – двигатель тележки включен 0 – двигатель тележки выключен |
| X1 | 1 – поворотный двигатель отрабатывает влево 0 – двигатель влево не отрабатывает |
| X2 | 1 – поворотный двигатель отрабатывает вправо 0 – двигатель вправо не отрабатывает |
Таблица 1.2 – Кодировка выходных сигналов
Разряд сигнала Y |
Событие |
| Y0 | 1 – левый датчик над светлой точкой трассы 0 – левый датчик над тёмной точкой трассы |
| Y1 | 1 – правый датчик над светлой точкой трассы 0 – правый датчик над тёмной точкой трассы |
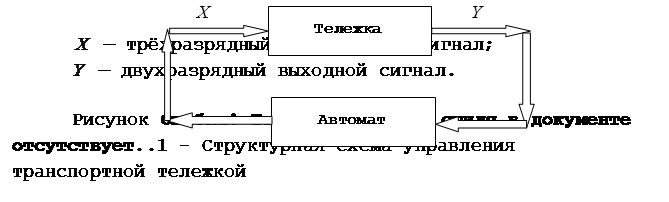 |
Сигналы Y используются в качестве обратной связи управляющего автомата. По изменению этих сигналов возможно судить о текущем положении тележки относительно белой полосы трассы. Сигналы X вырабатываются управляющим автоматом в зависимости от поведения во времени сигналов Y так, что бы обеспечить совпадение траекторий движения тележки и трассы.
1.4 Решение о подачи питания на задний привод тележки и, расположенный на ней, управляющий автомат принимает внешний оператор. Поэтому, исходным состоянием тележки является активность двигателя привода. В этом случае задача управляющего автомата состоит только в обеспечении движения тележки вдоль трассы.
1.5 Допущения, делаемые при рассмотрении управляемой тележки в динамике:
1) тягловое усилие ![]() постоянное;
постоянное;
2) приведённая сила трения ![]() пропорциональна линейной скорости движения тележки;
пропорциональна линейной скорости движения тележки;
3) сила трения ![]() , подменяющая реакцию
, подменяющая реакцию ![]() в момент, когда
в момент, когда ![]() (переднее колесо проскальзывает), постоянна и пропорциональна массе тележки;
(переднее колесо проскальзывает), постоянна и пропорциональна массе тележки;
4) сила трения ![]() , подменяющая реакцию
, подменяющая реакцию ![]() в момент, когда
в момент, когда ![]() (тележку заносит), также постоянна и пропорциональна массе тележки;
(тележку заносит), также постоянна и пропорциональна массе тележки;
5) масса тележки ![]() и её момент инерции
и её момент инерции ![]() относительно центра масс связаны зависимостью:
относительно центра масс связаны зависимостью: ![]() , как если бы вся масса тележки была сосредоточена в стержне
, как если бы вся масса тележки была сосредоточена в стержне ![]() (рисунок 1.1).
(рисунок 1.1).
2 Основное задание
2.1 Сформировать модель управляющего автомата в форме таблицы переходов и выходов автомата Милли, предварительно составив список его возможных состояний и перекодировав входной алфавит автомата во множество многозначной логики (Y - четырёхзначное);
2.2 Минимизировать, в случае возможности, таблицу переходов и выходов автомата Милли;
2.3 Составить алгебрологические выражения функции переходов и функции выходов минимизированного автомата, используя только двоичное представление входных и выходных сигналов;
2.4 Минимизировать полученные функции;
2.5 По минимизированным логическим функциям зарисовать цифровую схему управляющего автомата (стандарт условного графического изображения логических элементов — Российский).
3 Дополнительное задание
Вывести модель динамики транспортной тележки. Положение центра масс тележки в плоской системе координат задавать вектором положения ![]() . Положение точки приложения силы тяги привода задавать вектором
. Положение точки приложения силы тяги привода задавать вектором ![]() .
.
4 Список источников
4.1 Юдицкий С.А., Магергут В.Э. Логическое управление дискретными процессами. Модели, анализ, синтез. — М.: Машиностроение, 1987. — 176 c.
4.2 Кузнецов О.П., Адельсон-Вольский Г.М. Дискретная математика для инженеров. — М.: Энергоатомиздат, 1987. — 450 c.
4.3 Шварце Х., Хольцгрефе Г.-В. Использование компьютеров в регулировании и управлении: Пер. с нем.—М.: Энергоатомиздат, 1990. — 176 с.: ил.
4.4 Каган Б.М., Сташин В.В. Основы проектирования микропроцессорных устройств автоматики. — М.: Энергоатомиздат, 1987. — 304 c.
4.5 Мишель Ж., Лоржо К., Эспью Б., Программируемые контроллеры. — Пер. c французского А.П. Сизова — М.: Машиностроение, 1986.
4.6 Микропроцессоры: В 3-х кн. Кн. 2. Средства сопряжения. Контролирующее и информационно-управляющие системы: Учеб. Для втузов/В.Д. Вернер, Н.В. Воробьёв, А.В. Горячев и др.; Под ред. Л.Н. Преснухина. — М.: Высш. шк., 1986. — 383 c.: ил.
4.7 Фиртич В. Применение микропроцессоров в системах управления: Пер. с нем. — М.: Мир, 1984,—464 c., ил.
5 Решение основного задания
5.1 Выходной алфавит транспортной тележки является входным алфавитом управляющего автомата Y. Для возможности применения теории конечных автоматов перекодируем его во множество четырёх знаков в соответствии с таблицей 5.1.
Таблица 5.1 – Кодировка входного алфавита управляющего автомата
| Y0 | Y1 | Y |
0 0 1 1 |
0 1 0 1 |
0 1 2 3 |
5.2 При определении возможных состояний управляющего автомата будем руководствоваться правилом: — допустимо введение избыточных состояний, которые при последующей минимизации автомата исключаются; недопустим пропуск необходимого состояния, который уменьшает адаптированность автомата к внешним ситуациям.
Перечень возможных состояний автомата, отождествлённых с ситуационными событиями транспортной тележки, приводится ниже.
Таблица 5.2 – Перечень состояний управляющего автомата транспортной тележки
| Код состояния S |
Описание состояния |
0 1 2 3 |
Исходное состояние неуправляемого движения; Поворот вправо (поворотный двигатель непрерывно отрабатывает вправо); Поворот влево (поворотный двигатель непрерывно отрабатывает влево); Конфликт поворотов. |
5.3 Для возможности формирования математической модели управляющего автомата рассмотрим описательный алгоритм управления транспортной тележки по состояниям:
― В исходном состоянии тележка непрерывно движется под действием привода. Ни один из датчиков контраста не находится над белой полосой трассы. Поворотный двигатель остановлен;
― При возникновении белой полосы под левым датчиком контраста включается поворотный двигатель на отработку влево. Привод отключается и далее следует движение по инерции, что уменьшает вероятность заноса тележки;
― Как только левый датчик контраста “сходит” с белой полосы поворотный двигатель останавливается в текущем состоянии, а привод вновь запускается;
― При возникновении белой полосы под правым датчиком — поведение транспортной тележки аналогично;
― Возникновение белой полосы под правым и левым датчиком свидетельствует о том, что тележка движется перпендикулярно трассе. Это сбойная ситуация, при которой следует отключение привода и блокировка управляющего автомата. Нормальный ход работы автомата может быть восстановлен только “сбросом”.
5.4 Поскольку управляющий сигнал имеет три разряда, то для составления модели автомата Милли необходимо построить три таблицы переходов и выходов. Указанные таблицы, эквивалентные описательному алгоритму управления, приводятся ниже.
Таблица 5.3 – Таблицы переходов и выходов управляющего автомата
Код Si |
Для X0 | Для X1 | Для X2 | |||||||||
| y | y | y | ||||||||||
| 0 | 1 | 2 | 3 | 0 | 1 | 2 | 3 | 0 | 1 | 2 | 3 | |
| 0 | ||||||||||||
Код Si |
Для X0 | Для X1 | Для X2 | |||||||||
| y | y | y | ||||||||||
| 0 | 1 | 2 | 3 | 0 | 1 | 2 | 3 | 0 | 1 | 2 | 3 | |
| 1 | ||||||||||||
| 2 | ||||||||||||
| 3 | ||||||||||||
5.5 Как видно, состояния S0 , S1 , S2 явно эквивалентны, причём для каждого из выходов X. Представляется возможным эти эквивалентные состояния обозначить одним состоянием S0 – состояние управления тележкой. В этом случае, состояние блокировки S3 удобно переобозначить как S1 – состояние блокировки автомата. В результате получаем модель несократимого автомата Милли.
Таблица 5.4 – Таблицы переходов и выходов несократимого автомата
Код Si |
Для X0 | Для X1 | Для X2 | |||||||||
| y | y | y | ||||||||||
| 0 | 1 | 2 | 3 | 0 | 1 | 2 | 3 | 0 | 1 | 2 | 3 | |
| 0 | ||||||||||||
| 1 | ||||||||||||
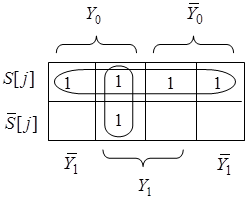
5.6 Учитывая, что код состояния полученной модели описывается одноразрядным сигналом S, а также учитывая кодировку входных сигналов Y (табл. 5.1), составим таблицу истинности комбинационной схемы автомата, непосредственно по таблице 5.4 и введя обозначения: S[j] — текущий сигнал состояния, S[j+1] — сигнал состояний на следующем такте автомата.
Судя по таблице 5.5, минимизации поддаётся только функция переходов ![]() . Минимизируем её методом карт Карно (см. рис. 5.1).
. Минимизируем её методом карт Карно (см. рис. 5.1).
Таблица 5.5 – Таблица истинности комбинационной схемы автомата
| S[j] | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 |
| Y0 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 |
| Y1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 |
| S[j+1] | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 |
| X0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| X1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| X2 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |

 |
5.7 Теперь можно записать логические выражения для комбинационной схемы автомата.
Функция переходов:
![]() . (5.1)
. (5.1)
Функции выходов в СДНФ по таблице истинности:
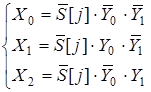 . (5.2)
. (5.2)
Для удобства реализации комбинационной схемы представим рассматриваемые функции в базисе “ИЛИ-НЕ”:
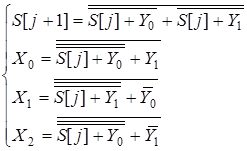 . (
5.3)
. (
5.3)
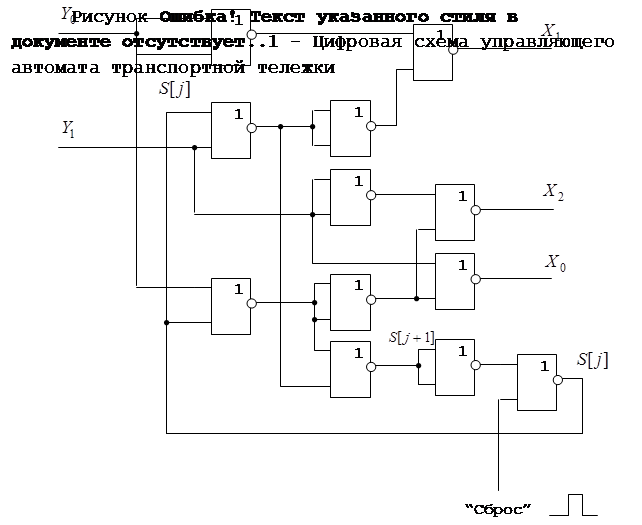
5.8 На основе системы (5.3), окончательно получаем цифровую схему реализации управляющего автомата транспортной тележки, представленную на рисунке 5.2.
Особенностью полученной схемы является то, что она не содержит элементы памяти и задержки и, соответственно, не является тактируемой. Такой вариант реализации возможен для автоматов с двумя состояниями, одно из которых является абсолютно устойчивым. В нашем случае состояние блокировки есть абсолютно устойчивое состояние. Если комбинационная схема сформируем это состояние, то за счёт обратной связи по линии S запрещается реакция выходов X на изменение входных сигналов Y. Выход из этого устойчивого состояния возможен только принудительным обнулением линии S единичным уровнем на линии “Сброс”. Конфликтных “Состязаний” в рассматриваемом автомате не возникает.
6 Решение дополнительного задания
6.1 Действующая на тележку в динамике система сил раскладывается на результирующую силу, приложенную к центру масс тележки  и вращающий момент
и вращающий момент  , относительно того же центра масс.
, относительно того же центра масс.
6.2 Как видно из рисунка
1.1 вращающий момент определяется только силой реакции опоры переднего колеса  —
—
![]() , (6.1)
, (6.1)
где ![]() — угол поворота переднего колеса.
— угол поворота переднего колеса.
Зная из рисунка, что
![]() , (
6.2)
, (
6.2)
получим:
![]() . (
6.3)
. (
6.3)
Положительные значения вращающего момента соответствуют повороту тележки влево, отрицательные — вправо.
6.3 Результирующая сила, действующая на центр масс тележки, определяется векторной суммой всех сил на рисунке 1.1:
![]() . (
6.4)
. (
6.4)
Для нашего случая важно знать направление действия силы ![]() , которое зависит от направлений и величин составляющих рассматриваемой суммы. В свою очередь направления составляющих рассматриваются относительно положения габаритной определяющей, которое характеризуется единичным вектором:
, которое зависит от направлений и величин составляющих рассматриваемой суммы. В свою очередь направления составляющих рассматриваются относительно положения габаритной определяющей, которое характеризуется единичным вектором:
![]() , (
6.5)
, (
6.5)
где ![]() — вектор, задающий координаты центра масс тележки;
— вектор, задающий координаты центра масс тележки;
![]() — вектор, задающий координаты точки приложения силы тяги
— вектор, задающий координаты точки приложения силы тяги ![]() ;
;
![]() — габаритная определяющая транспортной тележки.
— габаритная определяющая транспортной тележки.
6.4 Вектор представляется в базисе вектора  следующим образом:
следующим образом:
![]() , (6.6)
, (6.6)
где ![]() — единичный вектор, ортогональный вектору
— единичный вектор, ортогональный вектору ![]() ,
,
или
![]() . (6.7)
. (6.7)
Если ![]() имеет координаты
имеет координаты ![]() , то
, то ![]() имеет координаты
имеет координаты ![]() . Тогда вектор
. Тогда вектор ![]() , выраженный в базисе Декартовой системы координат, имеет вид:
, выраженный в базисе Декартовой системы координат, имеет вид:
 , (6.8)
, (6.8)
где ![]() — матрица (оператор) поворота вектора
— матрица (оператор) поворота вектора ![]() на угол
на угол ![]() .
.
Теперь, используя выражение (6.2), окончательно найдём, что
![]() . (
6.9)
. (
6.9)
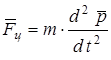
6.5 Из рисунка 1.1 очевидным образом вытекают выражения для векторов силы тяги и приведённой силы трения, а именно:
![]() , (
6.10)
, (
6.10)
![]() . (
6.11)
. (
6.11)
6.6 Центростремительная реакция трассы  определяется произведением массы тележки и нормальной составляющей ускорения её центра масс, возникающей при закруглении траектории движения:
определяется произведением массы тележки и нормальной составляющей ускорения её центра масс, возникающей при закруглении траектории движения:
![]() , (6.12)
, (6.12)
где ![]() — центростремительное ускорение.
— центростремительное ускорение.
Если траектория движения центра масс задаётся вектором ![]() , то
, то
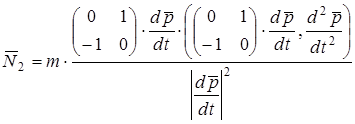 , (
6.13)
, (
6.13)
где ![]() — вектор скорости центра масс;
— вектор скорости центра масс;
![]() — вектор полного ускорения;
— вектор полного ускорения;
![]() — оператор скалярного произведения векторов.
— оператор скалярного произведения векторов.
Это физический факт. Вывод его опускаем.
6.7 Центр масс тележки смещается под действием результирующей силы , при этом справедливо:
 . (
6.14)
. (
6.14)
6.8 Точка приложения силы тяги смещается под действием вращающего момента  , за счёт которого ей придаётся угловое ускорение
, за счёт которого ей придаётся угловое ускорение  :
:
![]() , (6.15)
, (6.15)
где ![]() — момент инерции тележки относительно центра масс.
— момент инерции тележки относительно центра масс.
Зная угловое ускорение можно найти тангенциальное ![]() в скалярной форме:
в скалярной форме:
![]() ,
,
а затем и в векторной:
 , (6.16)
, (6.16)
где ![]() — векторная скорость изменения ориентации габаритной определяющей.
— векторная скорость изменения ориентации габаритной определяющей.
С другой стороны, — вектор тангенциального ускорения может быть выражен через полное ускорение вектора ![]() :
:
 , (6.17)
, (6.17)
где  — вектор полного ускорения изменения ориентации габаритной определяющей;
— вектор полного ускорения изменения ориентации габаритной определяющей;
В результате имеем связь:
 . (
6.18)
. (
6.18)
6.9 Учитывая, что приведённая сила трения пропорциональна модулю скорости центра масс:
 , (
6.19)
, (
6.19)
где ![]() — коэффициент трения,
— коэффициент трения,
на основании всех найденных зависимостей путём исключения неизвестных нетрудно получить систему дифференциальных уравнений, являющуюся моделью динамики транспортной тележки в векторной форме. Записать эту систему в одну строчку проблематично, поэтому ограничимся указанием того, что первое дифференциальное уравнение системы строится на основе выражений: (6.3), (6.4), (6.5), (6.9), (6.10), (6.11), (6.13), (6.14), (6.19), а второе на основе: (6.3), (6.5), (6.18). Решением первого уравнения является зависимость траектории центра масс тележки от времени, решением второго — ориентация во времени вектора ![]() .
.
Полученная система не имеет аналитического решения и поэтому должна решаться численно при любой зависимости от времени угла поворота ![]() и четырёх начальных условиях типа:
и четырёх начальных условиях типа:
 , (6.20)
, (6.20)
которые
29-04-2015, 04:14