Из-за значительных потерь угля (40-50%) и невысокой производительности установки бурошнековая выемка применяется пока только при погашении целиков и разработке пластов угля невысокого качества.
В ряде бассейнов нашей страны испытана безлюдная выемка угля канатной пилой. При выемке канатной пилой подэтаж разрезают скважинами на столбы по восстанию. Через скважины пропускают два каната. Концы канатов через направляющие блоки идут к приводу на вентиляционном или промежуточном штреке. Ко вторым концам над крепью промежуточного или откаточного штрека закрепляют пилу – отрезок каната или цепи с насаженными на них кулаками, армированными зубками или специальными фрезами.
Возвратно-поступательным движением пилы в столбе угля вырезают щель, и массив угля под действием силы тяжести и давления боковых пород разрушается и обрушается.
Очистное пространство не крепят, в связи с чем ширину столбов принимают от 4 до 8 м и длину от 30 до 7 м в зависимости от размера площади устойчивого обнажения боковых пород. В соответствии с шагом обрушения через каждые 1-4 столба оставляют режущий (барьерный) целик или возводят до печи режущую органную крепь. Выемку ведут с опережением верхними подэтажами нижних. Отбитый уголь из верхних подэтажей доставляют конвейерами на передовой скат.
Данную систему применяют на пластах с углом падения 50о и более с рыхлыми или трещиноватыми и хрупкими углями мощностью от 0,25 до 5-6м и устойчивыми или средней устойчивостью боковыми породами. Потери угля в случае применения этой системы превышают 30%, что также не позволяет широко использовать эту систему разработки.
3. Углевыемка без постоянного присутствия людей в очистном забое. Осуществляется с помощью очистных фронтальных агрегатов типа АК-4, А-3, АФК, Ф1. Фронтальная технология выемки угля с применением фронтальных агрегатов по сравнению с узкозахватной обладает следующими принципиальными преимуществами:
· работы по выемке угольного пласта и передвижению секций крепи ведутся одновременно по всей длине очистного забоя, для обеспечения высокопроизводительной работы не требуется высоких скоростей резания угля и перемещения секций крепи: резание угля при струговом исполнительном органе ведется в направлениях вдоль напластования с поверхности забоя, где уголь наиболее отжат, с постоянной и оптимальной глубиной резания равной 10-15 см, со скоростью резания не более 1 м/с, что обеспечивает максимально возможное улучшение сортности добываемого угля, снижение пылеобразования и уменьшение энергоемкости процесса разрушения 1 т угля до 0,3 кВт. ч;
· однооперационный процесс выемки угля без специальных концевых операций и сосредоточение в агрегате как едином целом средств выемки, доставки и крепления создают более благоприятные условия для осуществления автоматического и дистанционного управления, с целью осуществления выемки угля без постоянного присутствия рабочих в очистном забое;
· при струговом способе разрушения угля и групповом способе передвижения секций крепи создается минимальное обнажение рабочего пространства (не более 2м2 ), что создает возможность эффективной работы в условиях пластов со слабыми и неустойчивыми породами кровли;
· эффективность работы угледобывающих агрегатов как единого целого в меньшей степени зависит от угла залегания пласта.
При создании средств механизации угледобычи на крутых и тонких пластах необходимость перехода на фронтальную технологию выемки с применением угледобывающих агрегатов особенно назрела. Это объясняется тем, что присущее очистным узкозахватным комплексам противоречие между необходимостью дальнейшего увеличения скорости движения комбайна и ограниченными возможностями крепи и обслуживающего персонала по обеспечению оперативной передвижки крепи вслед за комбайном при переходе на крутой и особенно на тонкий пласт становится неразрешимым.
Прогрессивность применения фронтальных агрегатов базируется на принципиально новом процессе отбойки угля – силовом резании одиночными резцами. Особенность этого способа заключается в высокоэффективном отделении одиночным резцами больших сечений стружки, работе в направлении напластования и в наиболее отжатой зоне – по всей поверхности открытого забоя. Существенное увеличение толщины стружки до оптимально величины – 100 – 150мм позволит резко улучшить сортность добываемого угля, уменьшить до минимума пылеобразование и снизить энергоемкость процесса разрушения 1 т угля в среднем до 0,2 – 0,3 кВт. ч, или в 3-5 раз.
Для ведения фронтальной отбойки угля необходимо, чтобы исполнительный орган обеспечивал непрерывную обработку всей поверхности забоя, включая концевые участки, в постоянном и оптимальном режиме одновременно и независимо от крепления и других операций в лаве. В этом случае устраняются дополнительные затраты времени на концевые операции, выдвижку концевых секций крепи и става конвейера, внедрение в пласт исполнительного органа комбайна, выемку ниш и другие операции, на которые в комплексно-механизированных лавах расходуется до 25-40% времени.
Важным является также то, что при таком способе разрушения угля в зоне работы исполнительного органа агрегата создается минимальное обнажение рабочего пространства, что позволяет успешно применять агрегаты в условиях слабых и неустойчивых пород кровли. Таким образом, применение исполнительного органа силового резания фронтального агрегата открывает новые возможности в самом процессе воздействия на угольный пласт. Разрушение таким исполнительным органом качественно отличается от разрушения пласта комбайнами или стругами. В результате намечаются пути роста всех технико-экономических показателей добычи угля.
5. Автоматизация периода дотягивания ШПУ с асинхронным приводом.
Для решения задачи обеспечения сниженной скорости дотягивания разработаны и внедрены различные системы электропривода и конструкции: асинхронный двигатель с регулируемым механическим тормозом; асинхронный двигатель с микроприводом; двухдвигательный асинхронный привод; асинхронный двигатель с питанием током низкой частоты; асинхронный двигатель с тиристорным коммутатором в цепи ротора.
Наибольшее распространение получил метод дотягивания по системе асинхронный двигатель – механический тормоз. Механическая характеристика 1 (рис а) системы асинхронный двигатель – механический тормоз получена сложением механической характеристики двигателя 2 и механической характеристики механического тормоза 3, управляемого регулятором давления.
Получение скорости дотягивания осуществляется совместной работой асинхронного двигателя на второй или третьей ступени роторного резистора и механического тормоза МТ. Это достигается с помощью электропневматического регулятора давления РДБВ (рис б), управление которым производится с помощью магнитного усилителя МУ. Привод МУ включен на обмотку управления соленоидом регулятора давления.
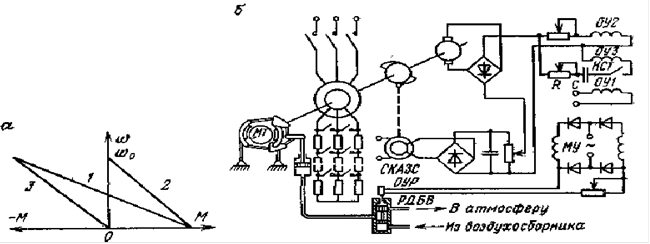
В схеме задействованы три обмотки управления МУ. Обмотка смещения ОУ1 создает начальный ток в обмотке ОУР и пропорциональный ему тормозной момент. Напряжение коммандоаппарата СКАЗС, соответствующее заданной скорости, сравнивается с напряжением снимаемым с тахогенератора BR и пропорциональным действительной скорости, и подается на обмотку управления ОУ2. Ток по обмотке управления пойдет только при условии, если действительная скорость станет выше заданной. Этот ток увеличивает напряжение на выходе МУ и ток в обмотке ОУР. Этому соответствует увеличение тормозного момента.
Обмотка управления ОУ3 с конденсатором С и резистором R осуществляет коррекцию по ускорению. Контакт контактора стопорения КСТ разрывает цепь этой обмотки при стопорении машины.
Использование в схеме магнитного усилителя для питания обмотки ОУР регулятора давления РДБВ позволяет увеличить мощность управления электромагнитом электропневматического регулятора давления, уменьшить мощность датчиков и применить различные контуры корректирующих цепей.
Отличаясь простотой и надежностью, этот способ получения малых скоростей ухудшает энергетику привода, так как режим работы двигателя характеризуется потерями в цепи ротора, пропорциональными скольжению. Кроме того, двигатель преодолевает дополнительно момент механического тормоза.
Скорость дотягивания можно получить по схеме двухдвигательного асинхронного привода. Для рудничной подъемной машины двухдвигательный привод – это привод, состоящий из двух асинхронных двигателей с фазным ротором, расположенных на одном валу. При вухдвигательном приводе получение скорости дотягивания достигается совместной их работой: одного – в двигательном режиме, другого – в режиме динамического торможения. Поддержание постоянства скорости дотягивания достигается автоматическим изменением тока статора двигателя, работающего в режиме динамического торможения с изменением момента нагрузки на валу подъемного двигателя. В периоды пуска, установившегося движения и замедления электродвигатели работают в двигательном режиме как и в обычной схеме.
В настоящее время для подъемных машин находят применение коммутаторы двух типов: с широтно-импульсным управлением на стороне переменного тока и фазовым управлением. Коммутаторы с широтно-импульсным управлением отличаются простотой схемного решения, коммутаторы с фазовым управлением обеспечивают более благоприятное протекание электрорегулирования скорости. Поэтому первые рекомендуется применять на малых подъемных машинах, оборудованных двигателями небольшой мощности, а вторые – на подъемных машинах с двигателями средней и большой мощности.
Силовая часть коммутатора содержит шесть тиристоров которые объединены в три пары, соединенные между собой в треугольник (рис) и подключенные к роторным резисторам подъемного двигаетлся ПД.
Коммутатор с фазовым управлением содержит усилитель У сигнала ошибки по скорости ∆U и три идентичных канала импульсно-фазового управления К1-К3, каждый из которых управляет двумя встречно-параллельно включенными тиристорами.
В развернутом виде приведена только схема канала К1, управляющего тиристорами VS1 и VS2, а каналы управления К2 и К3 тиристорами VS3, VS4 и vS5, VS6 изображены в виде блоков.
 Рис. Принципиальная схема тиристорного коммутатора с фазовым управлением.
Рис. Принципиальная схема тиристорного коммутатора с фазовым управлением.
На вход усилителя У, являющегося общим для всех каналов управления, через резистор R1 подается сигнал ∆U, на его выходе формируется сигнал управления Uу , который связан с углом открывания транзисторов пропорциональной зависимостью. На транзисторе VT1 выполнен усилитель напряжения, а транзисторе VT2 – эмиттерный повторитель. Максимальные значения напряжений коллекторов транзисторов VT1 и VT2 ограничиваются стабилитронами VD1 и VD2. Переменным резистором R2 устанавливается необходимое смещение на входе усилителя, которое может быть как положительным, так и отрицательным. Поскольку сигнал смещения алгебраически суммируется с сигналом ∆U, то движение с требуемой малой скоростью может осуществляться при различных соотношениях между сигналами заданной и действительной скоростей.
Коммутатор вводится в работу подачей напряжения в его схему управления в момент подключения подъемного двигателя к питающей сети. При этом темп нарастания момента двигателя до величины, определяемой сигналом ∆U, для снижения динамических нагрузок формируется зарядом емкости С3 – через резисторы R8 и R9. В результате в момент подачи напряжения в схему управления обеспечивается максимальная величина сигнала Uу , что соответствует закрытому состоянию тиристоров.
По окончании периода дотягивания напряжение со схемы управления коммутатором снимается с некоторым упреждением, и поэтому сначала закрываются его тиристоры, а затем происходит отключение подъемного двигателя от сети переменного тока. Это способствует стопорению машины, а разрываемый реверсором ток соответствует полностью введенным роторным резисторам, и поэтому подгорание его контактов минимально.
Если производится дотягивание недогруженного подъемного двигателя, его момент даже при полностью введенных роторных резисторах может оказаться чрезмерно большим и будет происходить увеличение частоты вращения сверх заданной величины. В этом случае в работу вмешивается механический тормоз, компенсирующий избыточную часть двигательного момента. Согласование зон работы коммутатора и механического тормоза происходит переменным резистором R2.
6. Преимущества и недостатки автотрансформаторов.
Автотрансформатор – это такой вид трансформатора, в котором помимо магнитной связи между обмотками имеется еще и электрическая связь.
Проходная мощность Sпр автотрансформатора представляет собой всю передаваемую мощность из первичной цепи во вторичную.
Расчетная моность Sрасч представляет собой мощность передаваемую из первичной во вторичную цепь магнитным полем, от её величины зависят размеры и вес трансформатора.
В трансформаторе вся проходная мощность является расчетной, т.к. между обмотками трансформатора существует лишь магнитная связь.
А автотрансформаторе между первичной и вторичной цепями помимо магнитной связи существует ещё и электрическая – поэтому расчетная мощность в автотрансформаторе составляет лишь часть проходной: Sпр =Sэ +Sрасч
Таким образом автотрансформатор по сравнению с трансформатором равной мощности обладает следующими преимуществами:
· Меньшим расходом активных материалов (медь и электротехническая сталь).
· Более высоким КПД
· Меньшими размерами и стоимостью.
Наиболее целесообразно применение автотрансформаторов с коэффициентом трансформации RA < 2.
При большом значении коэффициента трансформации преобладающее значение имеют недостатки трансформатора:
· Большие токи к.з. в случаях понижающего автотрансформатора, поэтому токи к.з. должны ограничиваться сопротивлением других элементов электрической установки, включенных в цепь автотрансформатора.
· Электрическая связь стороны ВН со стороной НН; это требует усиленной лектрической изоляции всей обмотки.
· При использовании автотрансформаторов в схемах пониженного напряжения между проводами сети НН и землей возникает напряжение, примерно равное U между проводом и землей на стороне ВН.
· В целях обеспечения эл. безопасности обслуживающего персонала нельзя применять автотрансформаторы для понижения напряжения сетей ВН до значений НН, подводимого непосредственно к потребителям.
7. Принципиальная схема преобразователя частоты со звеном постоянного тока и возможности использования в приводе.
Наиболее экономичный и эффективный способ регулирования скорости электропривода с асинхронным двигателем – изменение частоты питающего напряжения. Поэтому широкое распространение получили преобразователи частоты с промежуточным звеном постоянного тока.
В преобразователе частоты с промежуточным звеном постоянного тока переменное напряжение сети сначала выпрямляется с помощью управляемого выпрямителя, а затем через фильтр подается на автономный инвертор, который вновь преобразует постоянное напряжение в переменное, но с регулируемой частотой.
В схеме преобразователя частоты с промежуточным звеном постоянного тока имеется выпрямитель V, который может быть управляемый или неуправляемый. Если регулирование напряжения на нагрузке осуществляется автономным инвертором Uz или специальным импульсным преобразователем в цепи постоянного тока, то выпрямитель U может быть неуправляемым.
Наиболее ответственным узлом в преобразователях частоты с промежуточным звеном постоянного тока является автономный инвертор. Дело в том, что этот инвертор работает на автономную нагрузку, в которой отсутствует источник ЭДС. Поэтому автономный инвертор снабжен узлом искусственной коммутации, который прерывает ток в вентиле и включает его в нужный момент времени в соответствии с работой схемы управления.
Преобразователь частоты со звеном постоянного тока позволяет изменять частоту на нагрузке как вверх, так и вниз относительно частоты сети в широком диапазоне.
Широкое применение преобразователей частоты с промежуточным звеном постоянного тока нашли в приводе угольных и проходческих комбайнов, а также в приводах где отсутствуют тормозные режимы.
8. Определение расчетных электрических нагрузок.
Определение расчетных электрических нагрузок выполняется от низших к высшим ступеням системы электроснабжения по отдельным расчетным узлам в сетях с напряжением до 1000 В и выше. В настоящее время применяют несколько методов определения расчетных электрических нагрузок:
1. Метод, определяющий расчетную нагрузку путем умножения установленной мощности на коэффициент, меньший единицы,
Pp =K1 PH .
2. Метод, определяющий расчетную нагрузку путем умножения средней нагрузки на коэффициент, больший или равный единице,
Pp =K2 Pc
или путем добавления к средней нагрузке некоторой величины, характеризующей отклонение расчетной нагрузки от средней,
Pp =Pc +σ.
К первому методу следует отнести метод определения расчетной нагрузки по установленной мощности и коэффициенту спроса. Ко второй группе относятся следующие методы определения расчетной нагрузки: по средней мощности и коэффициенту формы графика нагрузки; по средней мощности и коэффициенту максимума нагрузки (метод упорядоченных диаграмм показателей графиков нагрузки); по средней мощности и среднему квадратическому отклонению (статистический метод). Существуют и другие методы определения расчетных нагрузок: по удельному расходу электроэнергии; по удельной мощности.
Общие рекомендации по выбору метода определения расчетных электрических нагрузок следующие:
1. Для определения расчетных нагрузок по отдельным группам приемников и узлам напряжением до 1000 В следует использовать метод упорядоченных диаграмм и статистический метод.
2. Для определения расчетных нагрузок напряжением выше 1000 В необходимо применять методы расчета, основанные на использовании средней мощности и коэффициентов Км , Кф и др.
3. При ориентировочных расчетах возможно применение метода расчета по установленной мощности и коэффициенту спроса, а в некоторых частных случаях – по удельным показателям потребления электроэнергии.
Несмотря на рекомендации и требования СН 174-75 о применении Ки и Км для определения электрических нагрузок, пока для угольных шахт действует методика расчета нагрузок по установленной мощности и коэффициенту спроса. Поэтому для группы однородных по режиму работы приемников расчетная нагрузка для угольных шахт определяется из выражений:
Pp =Kc PH,
Qp =Pp tgφ,
![]()
где Кс – коэффициент спроса характерной группы приемников; Qp – расчетная реактивная нагрузка группы приемников; tgφ – соответствует характерному для данной группы приемников Cosφ.
При определении электрических нагрузок следует принимать коэффициенты спроса и мощности. При этом значения коэффициентов спроса для очистных и подготовительных работ следует использовать при расчете суммарных нагрузок по этим видам работ по шахте в целом.
Расчет электрических нагрузок (кВ. А) одного подземного участка шахты производится по формуле
![]()
где ![]() - суммарная рабочая номинальная мощность электроприемников участка, кВт; Kc
– коэффициент спроса по участку; Cosφ – коэффициент мощности по участку.
- суммарная рабочая номинальная мощность электроприемников участка, кВт; Kc
– коэффициент спроса по участку; Cosφ – коэффициент мощности по участку.
Значение коэффициента спроса определяют по формулам Центрогипрошахта, исходя из следующих положений.
1. Если механизация добычи угля или подготовительных работ осуществляется без электрической блокировки очередности пуска электродвигателей, коэффициент спроса следует определять из отношения
Кс
=0,286+0,714Pнм
/![]() ,
,
где Pнм – номинальная мощность наиболее мощного электродвигателя в группе (комбайн, конвейер, проходческая машина и т.п.), кВт.
2. Если для механизации
29-04-2015, 04:08