Если БХВ имеет уход шкалы времени ![]() , то ИВИ (при отсутствии других погрешностей) позволяет получить квазидальномерные отсчеты в единицах времени
, то ИВИ (при отсутствии других погрешностей) позволяет получить квазидальномерные отсчеты в единицах времени ![]() . С последующим (в п.3.2.1) переходом к линейным единицам.
. С последующим (в п.3.2.1) переходом к линейным единицам.
Шумовая погрешность
Методика оценки средней квадратической шумовой погрешности слежения за временным положением огибающей дана на с.32-45 [1]. Для расчетов удобна формула из параграфа 42 [4], выражающая сразу погрешность оценки квазидальности по ССЗ в метрах
![]() =745.22065894
=745.22065894
Расчет следует выполнить при ![]() .
.
Другие источники погрешностей в ССРНС "ГЛОНАСС" по ССЗ (с.300 [4]):
- неточность прогноза координат и ухода шкалы времени - 4 м;
- возмущение орбит и немоделируемые уходы шкалы времени - 3 м;
- неточность прогноза времени распространения в тропосфере - 2 м;
- неточность прогноза времени распространения в ионосфере - 9 м;
- многолучевость распространения - 1,2 м;
- прочие источники - 1 м.
Результирующая погрешность находится как квадратный корень из суммы квадратов составляющих п. 3.1.2 и п. 3.1.3.
![]()
σrez’=11.622350668
В дифференциальных подсистемах ССРНС, за счет использования информации с контрольно-корректирующих пунктов исключается первая и четвертая из перечисленных в п. 3.1.3 составляющих.
Рекомендуется продумать как определить погрешность ![]() в значении средней концентрации N электронов в ионосфере вызывает указанную в п.3.1.3 четвертую (наиболее значимую) составляющая Dr=9м. Для этого необходимо воспользоваться приведенными на с.257 [1] соотношениями, из которых вытекает:
в значении средней концентрации N электронов в ионосфере вызывает указанную в п.3.1.3 четвертую (наиболее значимую) составляющая Dr=9м. Для этого необходимо воспользоваться приведенными на с.257 [1] соотношениями, из которых вытекает:
![]() ,
,
где ![]() ,
, ![]() .
.
![]() =0,253186813*1012
=0,253186813*1012
3.2 Алгоритм определения координат и поправки к шкале времени
Результаты измерений п.3.1.1 после умножения на скорость распространения радиоволн можно записать в виде:
![]() ,
,
где
![]() ,
, ![]()
Оценки искомых X, Y, Z, d могут быть найдены из системы нелинейных уравнений
![]() ,
,
k = 1, 2, 3, 4. Для упрощения расчетов в современной аппаратуре эта система линеаризуется за счет того, что истинные расстояния rпк при малых значениях X, Y, Z незначительно отличаются от счислимых: расстояний (от счислимой точки до ИСЗ) ![]() . При этом используется лишь линейная часть разложение величины rпк в ряд Тейлора. Учитывая, что частные производные от
. При этом используется лишь линейная часть разложение величины rпк в ряд Тейлора. Учитывая, что частные производные от ![]() по координатам судна равны (с обратным знаком) направляющим косинусам, значения которых имеются в табл.1, получим линейное приближение:
по координатам судна равны (с обратным знаком) направляющим косинусам, значения которых имеются в табл.1, получим линейное приближение:
![]() .
.
Обозначая разность между счислимым и измеренным расстояниями до ИСЗ через
![]()
можно исходную нелинейную систему переписать в виде линейной системы уравнений:

и в матричном виде
 .
.
![]()
![]() =382.102162131
=382.102162131
![]() =-1.264662138*10^3
=-1.264662138*10^3
![]() =984.859730108
=984.859730108
![]() =50
=50
Детерминант следующей матрицы: ![]() =0.441912386
=0.441912386
Детерминант матрицы Х: ![]() X=574.486101176
X=574.486101176
Детерминант матрицы Y: ![]() Y=574.486101176
Y=574.486101176
Детерминант матрицы Z: ![]() Z=22.095619276
Z=22.095619276
Детерминант матрицы D:![]() D=-1.144799074*10^-13=-0.0000000000001144799
D=-1.144799074*10^-13=-0.0000000000001144799
Решение этих уравнений через главный ![]() и частные
и частные ![]() ,
, ![]() ,
, ![]() определители представим в виде линейной комбинации результатов измерений на коэффициенты
определители представим в виде линейной комбинации результатов измерений на коэффициенты ![]() ,
, ![]() ,
, ![]() ,
, ![]() равные отношению соответствующих алгебраических дополнений к
равные отношению соответствующих алгебраических дополнений к ![]() :
:
X=![]() =1300
=1300
Y=![]() =1300
=1300
Z=![]() =50
=50
D=![]() =-2.59055665844*10^-13
=-2.59055665844*10^-13
где, например,
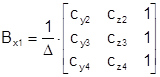 ;
;  ; ... и т. д..
; ... и т. д..
Каждый исполнитель работы выполняет аналитические выкладки для получения выражений ![]() и B с использованием формулы п.1.4.1
и B с использованием формулы п.1.4.1
![]() ,
, ![]() ,.
,.
Необходимо доказать, что: главный определитель системы уравнений
![]() ,
,
и из шестнадцати коэффициентов В три равны нулю, а остальные равны одному из всего семи значений, так что:
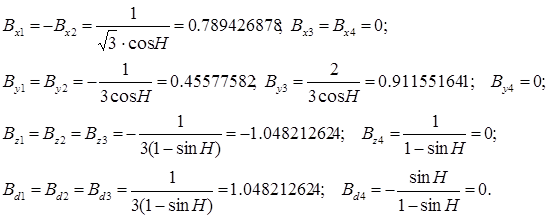
При расчете данных выражений использовались значения Н: Н1=Н2=Н3=43; Н4=90
Аналитические выкладки следует привести в приложении к отчету. При защите работы необходимо будет вывести выражение для одного из коэффициентов. Рассчитанные значения коэффициентов поместить в табл.3 с тремя знаками после запятой.
3.3 Оценка влияния погрешностей измерений на определение x, y, z
Понятие геометрического фактора (см. с.83 /1/) облегчает оценку точности системы в предположении одинаковости дисперсий ![]() и некоррелированности результатов измерений. Эти требования удовлетворяются из-за одинаковости условий приема сигналов различных ИСЗ.
и некоррелированности результатов измерений. Эти требования удовлетворяются из-за одинаковости условий приема сигналов различных ИСЗ.
При некоррелированности погрешностей измерений и одинаковости дисперсий (![]() ) применимо известное из теории вероятностей правило (см. с.326-327 [1]): дисперсия линейной комбинации равна произведению дисперсии
) применимо известное из теории вероятностей правило (см. с.326-327 [1]): дисперсия линейной комбинации равна произведению дисперсии ![]() на сумму квадратов коэффициентов. Применительно к решениям системы п.3.2.1 - это правило дает равенства:
на сумму квадратов коэффициентов. Применительно к решениям системы п.3.2.1 - это правило дает равенства:
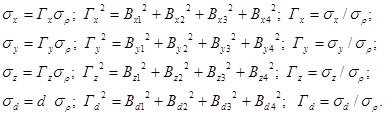
Величина Г и называется геометрическим фактором, зависящим лишь от взаимного геометрического расположения ИСЗ и судна.
Рассчитать геометрические факторы с двумя знаками после запятой
(![]() 1.11,
1.11, ![]() 1.11,
1.11, ![]() 1.81,
1.81, ![]() ).
).
Рассчитать геометрический фактор погрешности местоопределения на поверхности Земли ![]() и в пространстве
и в пространстве ![]() :
:
![]() =2.406039961,
=2.406039961, ![]() =1.578853755.
=1.578853755.
Рассчитывается погрешность местоопределения судна (на поверхности) в среднеорбитальной спутниковой РНС и по дифференциальной подсистеме - с учетом результатов п.3.1.3 - 3.1.4.
Данные расчета занести в табл.1.
Таблица 1
| Система | ССРНС | Навстар | Диф. ССРНС |
| sм (м) | 18,32 | 50,08 | 10,93 |
4. Режим определения путевой скорости, путевого угла и поправки к частоте опорного генератора
4.1 Модель фазового измерителя секундных приращений дальности до ИСЗ
Такой измеритель включает два верхних квадратурных канала рис.13.7 [1] и ГУН несущей, который состоит из высокостабильного неуправляемого опорного генератора ОГ и цифрового синтезатора частоты ЦСЧ, управляемого выходным сигналом схемы Костаса. ЦСЧ содержит регистр текущей разности фаз между колебаниями ОГ и принятого сигнала. Одному фазовому циклу соответствует равное длине волны приращение радиального расстояния от судна до ИСЗ. Из-за принципиальной многозначности фазовых измерений отсчет ЦСЧ в начальный момент времени t0 может отличаться от истинной величины измерявшегося в п.3.2.1 расстояния на неизвестное целое число длин волн. Поскольку это число сохранится во всех последующих отсчетах, то секундные изменения радиального расстояния, (как и приращения ![]() введенных в п.3.2.1 нормированных величин
введенных в п.3.2.1 нормированных величин ![]() ) будут определяться однозначно. Это позволяет по системе четырех линейных уравнений п.3.2.1 однозначно рассчитать и секундные приращения
) будут определяться однозначно. Это позволяет по системе четырех линейных уравнений п.3.2.1 однозначно рассчитать и секундные приращения![]() ,
, ![]() ,
, ![]() ,
, ![]() входящих в это уравнения X, Y, Z, d.
входящих в это уравнения X, Y, Z, d.
4.2 Определение секундных приращений координат
Они численно равны соответствующим проекциям вектора путевой скорости. А секундное приращение линейного эквивалента ухода шкалы времени в длинах волн равно разности между номиналами частот опорных генераторов ИСЗ и судна. Поэтому алгоритм определения перечисленных искомых величин сводится (после изменения обозначений по правилу: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ) к решению системы линейных уравнений п.3.1 в виде
) к решению системы линейных уравнений п.3.1 в виде
 .
.
Все полученные выше в п.3 аналитические выражения и численные значения для решения системы и геометрических факторов применимы и здесь с учетом изменения обозначений. В частности, погрешность оценки горизонтальной проекции
![]()
вектора путевой скорости и ухода частоты должны выражаться как
![]() ,
, ![]() .
.
Среднеквадратическая шумовая погрешность определения секундных приращений дальности ![]() в
в ![]() больше погрешности фазовых квазидальномерных отсчетов и выражается формулой
больше погрешности фазовых квазидальномерных отсчетов и выражается формулой
sDr»0,043[ПССН(N0/Р)]0,5 =0.152 (в м/с). (4.3)
Пссн=10
No/P=0.00007403 см.п. 2.3
Результаты расчетов, задаваясь П=10Гц, привести в таблице 2.
Таблица 2.
| Величина | ||||
| Значение | 0,00116 | 0,1023520 | 0.000058697 | |
При расчете использовались значения ![]() см.п.2.1,
см.п.2.1,
Vx= 7.583626043 м/с; Vy= 8.511675278 м/с; см. п. 1.4.5
Путевой угол ПУ=arctg(Vx/Vy)- это угол между проекцией Vxy вектора V на горизонтальную плоскость Погрешность оценки путевого угла приближенно выражается формулой
![]() .
.
5. Режим определения истинного курса, крена, дифферента
5.1 Основные понятия пространственной угловой ориентации судна
Ориентация судна это ориентация судовой системы координат относительно неподвижной (пусть – горизонтной) системы координат x,y,z с базисными ортами xо, yо, zо. Вектора (и орты) обозначаются жирным курсивом. Судовая ортогональная система координат фиксируется на каждом судне в процессе строительства и сдаточных испытаний, причем горизонтальная, продольная и поперечная плоскости пересекаются по поперечной, продольной и вертикальной осям. Начальная точка отсчета – точка пересечения осей. Ось абсцисс хП с ортом a и ось ординат уП с ортом b совпадают соответственно с по перечной и продольной осями судна. Орт оси аппликат zП равен a´b и перпендикулярен ортам a и b.
Проекции любого орта е на оси x,y,z координат равны их направляющим косинусам НК (углов между ортом и осями): Прхе=сх, Пруе=су, Прzе=сz. Если проекции этого орта отложить от начала координат и построить прямоугольный параллелепипед, то исходящая из начала координат диагональ такого параллелепипеда и представляет рассматриваемый орт е=x0cx+y0сy+z0cz причем сх2+су2+сz2=1. Это равенство указывает, что вся информация о пространственной угловой ориентации орта любой оси содержится в трех НК. А полная информация об ориентации судна (т.е. о трех осях подвижной системы координат) содержится в матрице из девяти НК; причем равенство нулю скалярных произведений ортов(см./13/,п.14.10-1b) позволяет всегда указать на три НК, через которые выражают и остальные шесть.
Орты продольной и поперечной осей судна далее будут представляться как
b=x0cbx+y0 сby+z0cbz, a=x0cax + y0 cay + z0c az , ( 5.1 )
позволяя дать четкие количественные формулировки для указанных в п.1.4.5. трех параметров угловой ориентации судна:
дифферент Д это угол между ортом b продольной оси уП судна и плоскостью х0у,
2) крен К – угол между ортом а поперечной оси хП и плоскостью х0у,
3) истинный курс И это угол между направленной на север осью ординат у и проекцией орта b продольной оси уП судна на плоскость х0у.
Из прямоугольного параллелепипеда, соответствующего первому равенству (5.1) вытекают компактные соотношения для НК орта продольной оси
cbх=Прxb=cosДsinИ, сby=Пруb =cosДcosИ, сbz=Прzb =sinД.
Лишь один НК орта а выражается компактно: саz=cos(90о-К)=sinК. Далее ограничимся использованием полученных выше компактных выражений четырех НК: они достаточны для определения используемых угловых параметров
И=arctg(сbх/сby), Д=arcsinсbz, К=arcsinсаz . ( 5.2 )
Следует иметь ввиду, что обсуждаемые выше параметры относятся к одномоментному состоянию судна (относящемуся к одному моменту времени) без какой либо привязки с «предисторией» или прогнозом динамического процесса изменения ориентации судна во времени. На практике могут использоваться и другие методы и параметры описания угловой ориентации.
5.2 Алгоритмы и погрешности определения истинного курса, крена и дифферента по сигналам 4-х ИСЗ
Ограничимся рассмотрением случая 4-х ИСЗ, когда k=1.2.3.4 и систему линейных уравнений (5.2) можно представить с помощью апробированных в разделах .3 и 4 матриц
 ;
;  . ( 5.3 )
. ( 5.3 )
Необходимые нам направляющие косинусы определяются по формулам раздела.3 (с соответствующей заменой обозначений) .
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
Средние квадратические погрешности определения направляющих косинусов при одинаковых СКП sp величин pak и pbk нормированных разностей расстояний выражаются аналогично (3.6):
![]() ; ( 5.4 )
; ( 5.4 )
![]() . ( 5.5 )
. ( 5.5 )
![]() . ( 5.6 )
. ( 5.6 )
Связь погрешности истинного курса DИ, дифферента DД и крена DК (в радианах) с погрешностями направляющих косинусов вытекает, если взять дифференциал соответствующего равенства из (5.1) или (5.2) и заменить знак дифференциала на приращение. Получаем:
DК=Dсaz/cosK, DД=Dcbz/cosД.
Такая же взаимосвязь сохранится и для среднеквадратических погрешностей СКО, т.е.
sК=scaz/cosK, sД=sсbz/cosД,
что с учетом (5.4) позволяет получить расчетные соотношения
sК=spГz/cosK=0.82505, sД=spГz/cosД=0.80505 ( 5.7)
Формулу для оценки погрешностей истинного курса получим, приведя дифференциал истинного курса И=arctg(сbх/сby) к приближению DИ @ сbyDсbх-сbxDсby. Поэтому СКО погрешности с учетом (5.5), (5.6) и (3.7) можно выразить как
sИ=spГм=0.1418 град, где Гм=(Гх2+Гу2)½ (5.8 )
Количественные расчеты погрешностей выполняются для величин, определяемых предыдущими тремя формулами.
28-04-2015, 23:35