Оптическую ось зрительной трубы теодолита поворотом теодолита совмещают с реперной точкой и снимают показания с горизонтальной шкалы теодолита. Разность показаний теодолита и буссоли характеризует искажение магнитного поля в данной точке.
Задавая имитатору последовательно азимуты 60°, 90° и т.д., по показаниям буссоли через каждые 30° оценивают однородность магнитного поля во всем диапазоне азимутов.
Указанные операции повторяют для двух значений отклонения имитатора от вертикали, соответствующих зенитным углам, при которых поверяют инклинометр по азимуту.
Магнитное поле в зоне поверки инклинометра считается однородным, если отклонения направления горизонтальной составляющей магнитного вектора не превышают основной допускаемой погрешности буссоли.
Для определения оптимального положения корпуса инклинометра в зажимном устройстве поверочной установки используют специальное приспособление в виде кольца со стопором, на боковой поверхности которого сделана разметка (проведены образующие) через каждые 30° с погрешностью, не превышающей ![]() 5, (рис. 7). Приспособление устанавливается на охранный кожух прибора инклинометра, установленного в поверочную установку. На торце зажимного устройства поверочной установки ставится метка. Скважинному прибору инклинометра при помощи поверочной установки задается минимальный зенитный угол, при котором в технической документации на него нормируется погрешность измерения азимута (например, 4° для инклинометра типа КИТ, КИТ-А, МИР-36, 3° для инклинометра типа ИН-1-721, 2° для инклинометра типа ИГ-36 и т.д.).
5, (рис. 7). Приспособление устанавливается на охранный кожух прибора инклинометра, установленного в поверочную установку. На торце зажимного устройства поверочной установки ставится метка. Скважинному прибору инклинометра при помощи поверочной установки задается минимальный зенитный угол, при котором в технической документации на него нормируется погрешность измерения азимута (например, 4° для инклинометра типа КИТ, КИТ-А, МИР-36, 3° для инклинометра типа ИН-1-721, 2° для инклинометра типа ИГ-36 и т.д.).
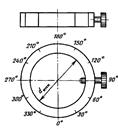
Рис.7 Вспомогательное кольцо.
При любом значении азимута, заданном на поверочной установке (например 30°) скважинный прибор инклинометра устанавливается таким образом, чтобы отметка «0» на приспособлении совпадала с меткой на торце зажимного устройства поверочной установки. Выполняется не менее четырех измерений установленного азимута при подходе к заданному азимуту со стороны меньших и больших значений. Скважинный прибор инклинометра поворачивают вокруг собственной оси на 30° (до следующей отметки на приспособлении) и снова четыре раза измеряют азимут, заданный на поверочной установке. Измерив таким образом установленный азимут при различных положениях скважинного прибора относительно отметки на торце зажимного устройства через каждые 30° в диапазоне 0-360°, т. е. при полном обороте скважинного прибора инклинометра относительно своей оси, строят график зависимости систематической составляющей погрешности измерения азимута ![]() (α) от положения охранного кожуха скважинного прибора инклинометра относительно апсидальной плоскости скважинного прибора (ψ) (рис. 8). По полученному графику определяют положение охранного кожуха скважинного прибора инклинометра относительно метки на торце зажимного устройства поверочной установки, при котором систематическая составляющая погрешности измерения азимута имеет максимальные значения со знаком «плюс» или «минус», и отмечается на приспособлении.
(α) от положения охранного кожуха скважинного прибора инклинометра относительно апсидальной плоскости скважинного прибора (ψ) (рис. 8). По полученному графику определяют положение охранного кожуха скважинного прибора инклинометра относительно метки на торце зажимного устройства поверочной установки, при котором систематическая составляющая погрешности измерения азимута имеет максимальные значения со знаком «плюс» или «минус», и отмечается на приспособлении.
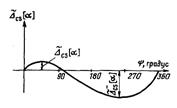
Рис.8 График зависимости систематической составляющей погрешности измерения азимута от положения охранного кожуха.
Основную погрешность инклинометра по зенитному углу определяют в начале, конце и в трех-пяти промежуточных точках диапазона измерений.
В каждой точке заданный зенитный угол измеряют не менее двух раз при приближении к заданному зенитному углу со стороны больших и меньших значений, при этом при установке прибора в поверочную установку корпус скважинного прибора инклинометра необходимо развернуть на 90° вокруг своей оси относительно метки на вспомогательном кольце (см. рис. 8), соответствующей одному из максимальных значений систематической составляющей погрешности измерения азимута. Выполнив два измерения зенитного угла, корпус прибора разворачивают относительно своей оси на 180° и измерения повторяют.
Основную погрешность инклинометра при измерении азимута определяют, выполняя не менее двух измерений при положении скважинного прибора, соответствующем максимальному значению систематической составляющей погрешности азимута со знаком «плюс» и не менее двух - со знаком «минус».
Скважинному прибору, помещенному в поверочную установку (приспособление) задается наименьшее значение зенитного угла, для которого в технической документации на конкретный тип инклинометра нормируется погрешность измерения азимута.
Азимут измеряют при значениях азимута 5, 30, 60, 90, ..., 330, 355° и задании их со стороны меньших и больших значений. Аналогично находят азимуты при других зенитных углах (включая максимальное его значение, соответствующее середине диапазона измерения).
Основную погрешность измерения визирного угла определяют при минимальном зенитном угле, для которого в технической документации на конкретный тип инклинометра нормируется погрешность измерения визирного угла.
Прибору задают значения визирных углов, равные 0, 30,..., 60° и т. д., причем в каждой задаваемой точке выполняют не менее четырех измерений при задании визирного угла со стороны больших и меньших значений.
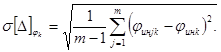
Систематическую составляющую основной погрешности инклинометра для каждого ![]() -го значения установленного угла (зенитного, азимута или визирного)
-го значения установленного угла (зенитного, азимута или визирного) ![]() (
(![]() ) определяют по формуле
) определяют по формуле
![]() (4)
(4)
где m - число измерений заданного угла (m![]() 4);
4); ![]() показания инклинометра при j - ом измерении k- гo значения установленного угла (зенитного, азимута или визирного), где j = 1, 2, 3, ..., m;
показания инклинометра при j - ом измерении k- гo значения установленного угла (зенитного, азимута или визирного), где j = 1, 2, 3, ..., m; ![]() - действительное значение задаваемого k-го угла (зенитного, азимута или визирного).
- действительное значение задаваемого k-го угла (зенитного, азимута или визирного).
Среднее квадратическое отклонение случайной составляющей основной погрешности инклинометра для каждого k- го значения установленного угла ![]() равно
равно
 (5)
(5)
Граница случайной составляющей основной погрешности инклинометра ![]() для доверительной вероятности Р = 0,95 при измерении k- то значения установленного угла равна
для доверительной вероятности Р = 0,95 при измерении k- то значения установленного угла равна
![]() =
= ![]() . (6)
. (6)
Нижнюю и верхнюю границы интервала ![]() ,
, ![]() , в котором с вероятностью Р = 0,95 находится погрешность инклинометра при измерении k-го значения установленного угла, определяют по формуле
, в котором с вероятностью Р = 0,95 находится погрешность инклинометра при измерении k-го значения установленного угла, определяют по формуле
![]() (7)
(7)
Основную абсолютную погрешность инклинометра при измерении k- то значения установленного угла необходимо оценивать по формуле
![]() (8)
(8)
При необходимости повышения инструментальной точности инклинометра путем исключения систематической составляющей погрешности следует строить графики поправок к показаниям инклинометра.
Инклинометр считают годным к эксплуатации, если выполняются следующие условия:
![]()
![]() (9)
(9)
![]()
где ![]() - оценка систематической составляющей основной погрешности инклинометра в заданной точке диапазона измерения установленного угла;
- оценка систематической составляющей основной погрешности инклинометра в заданной точке диапазона измерения установленного угла; ![]() ;
; ![]() - коэффициенты, равные отношению контрольного допуска (соответственно
- коэффициенты, равные отношению контрольного допуска (соответственно ![]() ];
]; ![]() ,
, ![]() ) к пределу допускаемой погрешности (соответственно
) к пределу допускаемой погрешности (соответственно ![]() ,
, ![]() ,
, ![]() ). Значения
). Значения ![]() и
и ![]() изменяются в пределах от 0,8 до 1,0 в зависимости от отношения пределов допускаемой погрешности образцовых и поверяемых СИ.
изменяются в пределах от 0,8 до 1,0 в зависимости от отношения пределов допускаемой погрешности образцовых и поверяемых СИ.
Курсовой уход гироскопа во времени для гироскопических инклинометров тоже определяют, задавая скважинному прибору наименьшее значение зенитного угла, при котором нормируется значение курсового ухода гироскопа во времени.
Прибору задают произвольный азимут и с интервалом 15 с производят четыре измерения азимута.
Среднее значение измеренного азимута ![]() определяют по формуле
определяют по формуле
![]() (10)
(10)
где ![]() - значения азимута, измеренные инклинометром через 15 с.
- значения азимута, измеренные инклинометром через 15 с.
Измерения повторяются через каждые 5 мин в течение 30 мин.
Для каждого k - то момента времени определяется значение курсового ухода гироскопа по формуле
![]() (11)
(11)
Среднее значение курсового ухода гироскопа за 5 мин равно
![]() (12)
(12)
Инклинометр считается годным к эксплуатации, если выполняются следующие условия
![]() ,
, ![]() (13)
(13)
где ![]() ,
, ![]() - допустимый курсовой уход гироскопа за 5 и 30 мин соответственно, нормированный в технической документации на поверяемый прибор.
- допустимый курсовой уход гироскопа за 5 и 30 мин соответственно, нормированный в технической документации на поверяемый прибор.
При обработке результатов измерений в скважине азимутальных, зенитных и визирных углов могут быть учтены систематические погрешности инклинометра по этим каналам, определенные при поверке.
С этой целью для конкретных типов инклинометров строят график поправок (рис. 9).
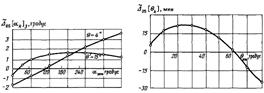
Рис.9 График поправок к показаниям инклинометра по зенитному углу (слева) и по азимуту (справа).
Границы погрешности инклинометра ![]() , при измерениях с использованием графика поправок к показаниям измеряемых значений углов определяются формулой
, при измерениях с использованием графика поправок к показаниям измеряемых значений углов определяются формулой
![]() (14)
(14)
где ![]() - основная допускаемая погрешность поверочной установки или образцового средства при использовании поверочного приспособления;
- основная допускаемая погрешность поверочной установки или образцового средства при использовании поверочного приспособления; ![]() -граница случайной составляющей основной погрешности инклинометра при измерении k- го значения j- го угла.
-граница случайной составляющей основной погрешности инклинометра при измерении k- го значения j- го угла.
Аттестация образцовых поверочных установок сводится к определению и устранению неперпендикулярностей их осей вращения, установке уровней в горизонтальной плоскости, ориентации установки в пространстве, обеспечивающей совмещение вертикальной оси вращения с направлением гравитационного вектора, а продольной оси зажима-с горизонтальной составляющей геомагнитного вектора и оценке погрешностей задания азимута, визирных и зенитных углов.
3. Феррозондовые инклинометры
Феррозонд, феррозондовый магнитометр, прибор для измерения и индикации магнитных полей (в основном постоянных или медленно меняющихся) и их градиентов. Действие феррозонда основано на изменении магнитного состояния ферромагнетика под воздействием двух магнитных полей разных частот. В простейшем варианте феррозонд состоит из стержневого ферромагнитного сердечника и находящихся на нём двух катушек: катушки возбуждения, питаемой переменным током, и измерительной (сигнальной) катушки. В отсутствие измеряемого магнитного поля сердечник под действием переменного магнитного поля, создаваемого током в катушке возбуждения, перемагничивается по симметричному циклу. Изменение магнитного потока, вызванное перемагничиванием сердечника по симметричной кривой, индуцирует в сигнальной катушке эдс, изменяющуюся по гармоническому закону. Если одновременно на сердечник действует измеряемое постоянное или слабо меняющееся магнитное поле, то кривая перемагничивания изменяет свои размеры и форму и становится несимметричной. При этом изменяется величина и гармонический состав эдс индукции в сигнальной катушке. В частности, появляются чётные гармонические составляющие эдс, величина которых пропорциональна напряжённости измеряемого поля и которые отсутствуют при симметричном цикле перемагничивания.
Как правило, феррозонд состоит из двух сердечников с обмотками, которые соединены так, что нечётные гармонические составляющие практически компенсируются. Тем самым упрощается измерительная аппаратура и повышается чувствительность феррозонда. Наиболее распространённые феррозондовые установки имеют следующие основные узлы: генератор переменного тока, питающий обмотку возбуждения, фильтр для нечётных гармонических составляющих эдс, подключенный на выходе измерительной катушки, усилитель чётных гармоник и выходной измерительный прибор. Феррозонды обладают очень высокой чувствительностью к магнитному полю (до 10-4–10-5 а/м).
Феррозонд применяют для измерения земного магнитного поля и его вариаций в частности, при поисках полезных ископаемых, создающих локальные аномалии геомагнитного поля; для измерения магнитных полей Луны, планет, межпланетного пространства; для обнаружения ферромагнитных предметов и частиц в неферромагнитной среде; в системах контроля за качеством выпускаемой продукции (магнитная дефектоскопия и др.).
Магнитная дефектоскопия основана на исследовании искажений магнитного поля, возникающих в местах дефектов в изделиях из ферромагнитных материалов. Индикатором может служить магнитный порошок (закись-окись железа) или его суспензия в масле с дисперсностью частиц 5–10 мкм. При намагничивании изделия порошок оседает в местах расположения дефектов (метод магнитного порошка). Поле рассеяния можно фиксировать на магнитной ленте, которую накладывают на исследуемый участок намагниченного изделия (магнитографический метод). Используют также малогабаритные датчики (феррозонды), которые при движении по изделию в месте дефекта указывают на изменения импульса тока, регистрирующиеся на экране осциллоскопа (феррозондовый метод).
Измерителем поля в феррозондовом магнитометре является феррозонд (или магнитомодулярный датчик), представляющий собой катушку с ферромагнитным сердечником. Первичная обмотка сердечника возбуждается от вспомогательного звукового генератора частотой 200 гц. Под его воздействием меняется магнитная проницаемость материала сердечника, а это, вследствие законов индукции, приводит к тому, что во вторичной обмотке катушки возникает электродвижущая сила, пропорциональная вектору напряженности магнитного поля Земли, направленному вдоль оси сердечника.
Для измерения вертикальной составляющей феррозонд ориентируется по вертикали особым маятником, помещенным в кардановом подвесе. Последний снабжен демпфирующим устройством для быстрого затухания колебаний. Феррозонд подключается к измерительному блоку. В нем помещен звуковой генератор, переключатель поддиапазонов, переключатель компенсации магнитного поля, измерительный индикаторный прибор. Среди отечественных магнитометров к этому типу относится магнитометр М-17, предназначенный для измерения с точностью до 15 нТл.
Использование геомагнитных приборов на основе магнитных датчиков (феррозондов), обеспечивающих учет поправки дирекционного угла, позволяет избавиться от части погрешности измерения. Поэтому в ряде систем местоопределения магнитные датчики направления, представляющие, как правило, трехкомпонентные измерители магнитного поля Земли, дополняются другими приборами, позволяющими компенсировать искажения магнитного поля, возникающие из-за различных факторов. В качестве таких приборов наиболее часто используются датчики ускорения - акселерометры . Сочетание магнитных датчиков направления с акселерометром иногда называют бесплатформенным магнитным компасом .
Принцип работы этого прибора состоит в следующем. Магнитные датчики измеряют полный вектор магнитного поля Земли. Однако для вычисления направления необходимо знать не полный вектор, о только его горизонтальную составляющую. Для этого с помощью трехкомпонентного акселерометра определяется направление вертикали в приборной системе координат, после чего вычисляются величина и направление горизонтальной составляющей магнитного поля Земли по отношению к скважине, т.е. её направление. Устранения погрешностей, связанных с искажениями магнитного поля Земли, можно добиться путем предварительной калибровки прибора, для чего достаточно снять показания магнитных датчиков в четырех положениях, получающихся поворотом прибора на 90° в горизонтальной плоскости.
В настоящее время известны акселерометры тензорезистивного, пьезорезистивного и пьезоэлектрического типа. Однако пока они имеют значительные габариты и массу, а также энергопотребление. Более перспективным направлением можно считать создание чувствительных элементов (ЧЭ) датчиков ускорения на основе емкостного принципа преобразования с использованием электростатической компенсации на материалах из кремния. ЧЭ, разработанные на основе этой технологии, получили название микромеханических. Конструкция ЧЭ емкостного типа представляет собой плоский дифференциальный конденсатор, имеющий две неподвижные пластины и внутренний подвижный электрод. Для таких чувствительных элементов характерны потенциально высокая термоустойчивость, стабильность метрологических характеристик во времени, отсутствие шумов и самонагрева. Принцип действия емкостного акселерометра основан на измерении разности емкостей между подвижным электродом и неподвижными пластинами. При отсутствии воздействия ускорения воздушные зазоры между подвижным электродом и неподвижными пластинами одинаковы, и соответственно сохраняется равенство значений емкостей. При воздействии ускорения в каком-либо направлении изменяются величины воздушных зазоров, в результате чего появляется разность емкостей и токов, протекающих через эти емкости. С помощью дифференциального усилителя эта разность усиливается и преобразуется в выходное напряжение, пропорциональное величине ускорения. Акселерометры на основе емкостных чувствительных элементов позволяют измерять ускорения до нескольких десятков м/с2 , имеют ток потребления в пределах единиц мА, могут быть выполнены в виде интегральных микросхем. Кроме акселерометров, в качестве корректоров геомагнитных приборов могут использоваться датчики угловой скорости на основе гироскопов . Принцип действия которых основан но эффекте Саньяка. По круговому оптическому пути благодаря расщеплению луча свет распространяется в двух противоположных направлениях. Если система находится в покое относительно инерционного пространство, оба световых луча распространяются встречно по оптическому пути одинаковой длины, поэтому при сложении лучей в расщепителе нет фазового сдвига. Однако когда оптическая система вращается в инерциальном пространстве, между световыми волнами возникает разность фаз, пропорциональная угловой скорости вращения. Имеется также информация о создании гироскопов на основе электрохимических преобразователей, гирочувствительных пьезорезонансных датчиков, емкостных преобразователей.
Датчик направления (феррозонд) представляет собой три ортогонально расположенных датчика магнитного поля. На выходе феррозонда присутствует аналоговый сигнал, величина которого пропорциональна углу поворота относительно магнитного меридиана Земли. Датчик ускорения (акселерометр) представляет собой три ортогонально расположенных емкостных датчика ускорения. На выходе присутствует сигнал, пропорциональный измеряемому ускорению. Датчик служит для устранения ошибки феррозонда, возникающей из-за негоризонтального расположения объекта относительно поверхности Земли.
4. Гироскопические инклинометры
Гироскоп - быстро вращающееся твёрдое тело, ось вращения которого может изменять своё направление в пространстве. Гироскоп обладает рядом интересных свойств, наблюдаемых у вращающихся небесных тел, у артиллерийских снарядов, у детского волчка, у роторов турбин, установленных на судах, и др. Свойства гироскопа к проявляются при выполнении двух условий: 1) ось вращения гироскопа должна иметь возможность изменять своё направление в пространстве; 2) угловая скорость вращения гироскопа вокруг своей оси должна быть очень велика по сравнению с той угловой скоростью, которую будет иметь сама ось при изменении своего направления.
Первое свойство уравновешенного гироскопа с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление. Если эта ось вначале направлена на какую-нибудь звезду, то при любых перемещениях основания прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно земных осей.
Второе свойство гироскопа обнаруживается, когда на его ось (или рамку) начинают действовать сила или пара сил, стремящиеся привести ось в движение (т. е. создающие вращающий момент относительно центра подвеса), движение гироскопа безынерционно.
Наиболее существенными признаками, характеризующими применяемые в технике разнообразные гироскопические приборы, являются: тип гироскопа, физический принцип построения чувствительного гироскопического элемента, тип подвеса, назначение гироскопические приборы.
Типы
29-04-2015, 00:51