БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
кафедра ЭТТ
РЕФЕРАТ на тему:
«Протез плеча с тремя управляемыми функциями. Ортопедический аппарат на верхнюю конечность »
МИНСК, 2008
Протез плеча с тремя управляемыми функциями
Протез предназначен для больных после ампутации верхней конечности на уровне не ниже средней трети плеча. Культя плеча должна быть при этом не короче 6 см от края подмышечной впадины. Протез может быть назначен после односторонней пли двусторонней ампутации.
Конструкция состоит из следующих основных узлов: кисти 1 (рис. 1) с электромеханическим приводом и лучезапястным шарниром 2, гильзы предплечья 3, механизма активной ротации гильзы предплечья 4, механизма локтевого шарнира 5 с электромеханическим приводом, механизма пассивной ротации гильзы плеча 6, гильзы плеча 7, системы биоэлектрического управления 8 и блока питания 9.
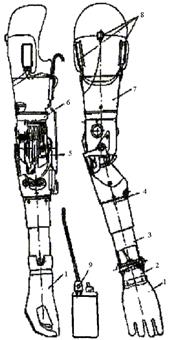
Рис. 1. Протез плеча с биоэлектрическим управлением тремя функциями.
Кисть с электромеханическим приводом заимствована от ранее описанных конструкций протезов предплечья и плеча с электроприводами и оснащена шаровым лучезапястным шарниром с клиновым фиксатором. Гильза предплечья изготовляется из полиэтилена. В гильзе предплечья размещаются механизм ротации и двухканальный усилитель мощности системы управления с двумя переключающими устройствами. Механизм ротации гильзы предплечья заимствован от протеза предплечья с двумя управляемыми функциями.Конструкция локтевого шарнира содержит несколько устройств: привод, состоящий из редуктора 1 (рис. 2) и электродвигателя 9, механизма фиксации локтевого шарнира 2 и уравновешивающего механизма 5, компенсирующего момент силы тяжести предплечья с кистью относительно оси локтевого шарнира.
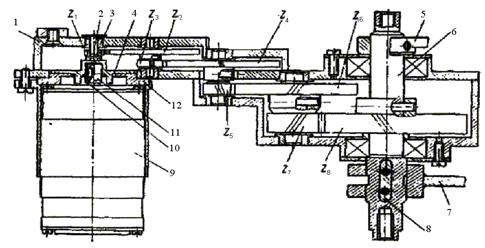
Рис. 2. Схема локтевого шарнира с электроприводом.
Редуктор состоит из четырех ступеней цилиндрических зубчатых колес Zl – Z8, причем первые две ступени ZI — Z 4 содержат прямозубые, а две последние Z5—Z 8 — косозубые колеса. Общее передаточное отношение составляет округленно 1: 590. Электродвигатель имеет поминальную мощность 5 Вт при номинальном напряжении 12 В. Электродвигатель связан с входной ступенью редуктора механизмом фиксации, состоящим из фрикционного диска 4 с полумуфтой и кулачковой полумуфты 11, жестко закрепленной на валу электродвигателя. Фрикционный диск 4 прижат к вкладышу 12 корпуса редуктора пружиной 3 и обеспечивает тормозной момент на входном валу редуктора при выключенном электродвигателе. Механизм фиксации работает следующим образом. При подаче на двигатель напряжения питания в соответствующей полярности кулачки 10 полумуфты 11, скользя по наклонным плоскостям полумуфты фрикционного диска 4, отжимают пружину 3 и фрикционный диск 4 от вкладыша 12 корпуса редуктора. Крутящий момент двигателя передается на редуктор через шестерню Zl , жестко закрепленную на входном валу. При отключении двигателя от источника питания пружина 3 возвращает в первоначальное положение фрикционный диск 4 и прижимает его к вкладышу 12 корпуса, проворачивая якорь двигателя, и обеспечивает этим фиксацию входного вала.
На выходном валу 6редуктора укреплены с одного конца, но уравновешивающего механизма 5, а с другого — рычагом к шпонке 8, внутри которой установлены пружины. Рычаг с помощью винтов соединяется с гильзой предплечья или плеча в зависимости от сборки протеза и при вращении выходного обеспечивает движение гильзы предплечья с кистью относительно, локтевого шарнира, осью которого является этот выходной.
Уравновешивающий механизм выполнен в виде четырехзнака, звено 12 (рис. 3) которого жестко закреплено на выходном валу редуктора и соединено посредством шарниров и серьги 13 с рычагом 10. В качестве упругого элемента использована пружина 11 кручения. При разгибании в локтевом шарнире звено 12 поворачивается вокруг оси по движению часовой стрелки, воздействует через шарнирное соединение на серьгу 13 и через нее на рычаг 10 и заводит пружину 11.
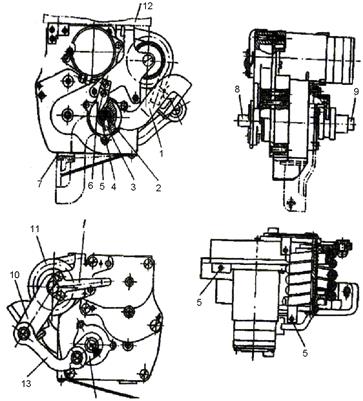
Рис. 3. Общий вид локтевого механизма с электроприводом.
При последующем сгибании в локтевом шарнире сила заведенной пружины 11 создает относительно оси локтевого шарнира момент, компенсирующий с достаточной полнотой момент силы тяжести звена предплечье — кисть.
Кроме сгибания и разгибания в локтевом шарнире приводобеспечивает также в определенных пределах свободные колебания (качания) звена предплечье — кисть. Для перехода из режима активного сгибания и разгибания в режим свободных колебаний необходимо с помощью привода выполнить полное разгибание в локтевом шарнире. При этом шпонка 3, достигнув упора б, переместится внутрь шпоночного паза вала 4, сожмет пружины 2 и удержится в этом положении упором 6, разъединив таким образом выходной вал 4 редуктора и рычаг 1, соединяющий привод с гильзой предплечья. В данном случае рычаг 1 и вместе с ним звено предплечье — кисть могут свободно прокручиваться относительно вала 4. В момент выхода шпонки из паза рычага пружинный ограничитель 7 сгибает протез в локтевом шарнире на угол до 30°.
Для перехода в режим активного сгибания необходимо включить электродвигатель привода так, чтобы выходной вал редуктора вращался в сторону сгибания в локтевом шарнире, В этом случае шпонка 3 соскальзывает с упора 6 и под действием пружин 2 входит в шпоночный паз рычага 1, связывая таким образом звено предплечье — кисть с валом 4 редуктора. При дальнейшей работе электродвигателя протез выполняет сгибание в локтевом шарнире. Привод может быть установлен в протезе как в гильзе плеча, так и в гильзе предплечья. При установке привода в гильзе плеча кольцо пассивной ротации 8 плеча крепится к корпусу редуктора в трех точках 5 с помощью винтов, звено предплечье — кисть посредством проушин одевается на шейки выходного вала 9, крепится на них и на рычаге / винтами. В случае установки привода в звене предплечье — кисть рычаг 1 крепится на гильзе плеча, а к корпусу редуктора — звено предплечье — кисть. Механизм пассивной ротации плеча такой же, как в тяговых протезах. Гильза плеча изготовляется индивидуально по гипсовому слепку с культи обычным способом из слоистого пластика. Схема биоэлектрического управления позволяет осуществлять последовательное управление движениями пальцев искусственной кисти, ротацией гильзы предплечья и движениями в локтевом шарнире от биопотенциалов двух мышц культи плеча: бицепса и трицепса. Биопотенциалами бицепса осуществляется последовательное управление сгибанием пальцев кисти, сгибанием в локтевом шарнире и пронацией гильзы предплечья. Биопотенциалами трицепса управляются разгибание пальцев кисти, разгибание в локтевом шарнире и супинация гильзы предплечья. Система управления содержит два канала и состоит из следующих основных узлов: усилителей напряжения; стабилизатора напряжения питания; усилителей мощности, в нагрузку которых включены реле; двух переключающих устройств, имеющих также в нагрузке реле, и блока питания. Контакты всех реле скоммутированы так, что к системе управления может быть последовательно присоединен один из трех электродвигателей: Ml (рис. 4)—привод механизма кисти или М2 —привод механизма локтевого шарнира, или МЗ — привод механизма ротации гильзы предплечья.
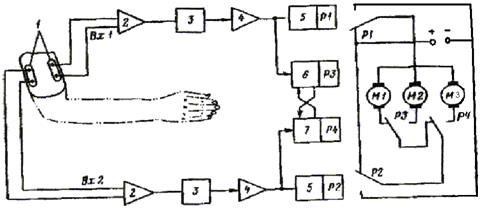
Рис. 4. Блок-схема биоэлектрического управления тремя функциями.
Работа системы управления может быть описана с помощью блок-схемы. Сигнал с управляющей мышцы, например бицепса, через электроды отведения биопотенциалов 1 подается па вход одного из каналов системы управления, например на Bx1. Если амплитуда сигнала с мышцы нарастает не очень быстро, т.е. не очень резко сокращается мышца, то после предварительного усиления по амплитуде, а затем по постоянному току соответственно в усилителе напряжения 2 и усилителе мощности 4 и при достижении определенной величины (порога) срабатывает реле Р1 в этом канале и через его контакты электродвигатель Ml подключается к источнику питания Б. Привод в этом случае выполняет сгибание пальцев искусственной кисти. Если после этого расслабить бицепс и не очень быстро сократить трицепс, то биоэлектрический сигнал с трицепса через вторую пару электродов токоотведения поступает на другой вход Вх2, т. е. на второй канал системы управления, и вызывает срабатывание реле Р2. В этом случае электродвигатель Ml присоединяется через контакты реле Р2 к источнику питания Б в противоположной полярности и кисть выполняет разгибание пальцев. Таким образом, при поочередной подаче па входы системы управления биоэлектрических сигналов с относительно медленным нарастанием амплитуды, несколько превышающей величину порога срабатывания каждого канала, можно управлять сгибанием и разгибанием пальцев искусственной кисти от двух усеченных мышц культи плеча — бицепса и трицепса.
При подаче быстрого и короткого по времени биоэлектрического сигнала достаточно большой амплитуды, например с бицепса на Bx1, этот сигнал усиливается по амплитуде в предусилителе 2, выпрямляется в активном детекторе 3 и создаст на выходе усилителя мощности импульс отрицательной полярности, который через цепь запуска, вызывает срабатывание переключающего устройства б, в нагрузку которого включено реле РЗ. Через контакты сработавшего реле РЗ электродвигатель Ml привода кисти отключается от системы управления и к ней подключается электродвигатель М2 привода механизма локтя, подобно тому как это имеет место в системе управления протезом предплечья с двумя функциями. Повторная подача переключающего сигнала с бицепса па это же переключающее устройство 6возвращает систему управления на привод кисти M 1.
Подача па вход Вх2 системы управления быстро нарастающего кратковременного сигнала с трицепса вызывает срабатывание переключающего устройства 7 и включенного в его нагрузку реле Р4. Через контакты реле Р4 в этом случае к системе управления подключается электродвигатель МЗ привода ротации предплечья. Относительно медленно нарастающими сигналами поочередно с бицепса и трицепса можно управлять движениями пронации и супинации предплечья. Повторная подача переключающего сигнала с трицепса возвращает переключающее устройство 7 и реле Р4 в исходное состояние, в результате чего к системе управления снова подключается электродвигатель M 1 привода кисти.
Если необходимо перейти на управление приводом ротации, а система управления переключена на привод локтя, т. е. сработало переключающее устройство 6, то надо подать с трицепса быстро нарастающий сигнал на вход Вх2 системы управления. В этом случае срабатывает переключающее устройство 7, которое через контакты реле Р4 присоединяет к системе управления электродвигатель МЗ привода ротации кисти. Переключающий сигнал с бицепса возвращает систему управления на электродвигатель М2 привода локтя. Таким образом, быстро нарастающими по величине сигналами с управляющих мышц можно подключать к системе управления один из трех электродвигателей приводом кисти, локтевого механизма и механизма ротации гильзы предплечья по максимально простому и экономичному коду, не требующему сколько-нибудь значительной психологической нагрузки от человека.
В качестве блока питания в данном протезе может быть использована батарея аккумуляторов ЮЦНК-0,45, как и в других протезах верхних конечностей с электроприводами.
Основные характеристики протеза: масса, кг, не более 2.
Сила схвата на концах пальцев кисти, Н 20 Угол сгибания и разгибания в локтевомшарнире, град 125. Максимальный момент, развиваемый приводом локтевого механизма, Н-см 640
Данный протез может быть оснащен и биоэлектрической системой пропорционального управления, как и в протезах предплечья. Схема последовательного управления с использованием переключающего устройства остается прежней.
Ортопедический аппарат на верхнюю конечность
Аппарат предназначен для снабжения инвалидов с вялым параличом верхней конечности при отсутствии активного сгибания и разгибания пальцев кисти и локтевого сустава. Конструкция аппарата состоит из следующих основных частей: кистедержателя 1 (рис. 5) с электромеханическим приводом б, гильзы предплечья 2, гильзы плеча 10, электромеханического привода 5 локтевого шарнира 3 с замком, наплечника 11, крепления 4, токосъемного устройства 9, системы управления 7, двух источников питания 8.
Кистедержатель состоит из рычагов 2 и 5 (рис. 6), соответствующих I, II и III пальцам; планки 3 и шины 4. Элементы 2, 3, 4 и 5 образуют механизм антипараллелограмма, неподвижным основанием которого является опорная шина 4. На рычагах 2 н 5 укреплены полукольца 1, охватывающие фаланги пальцев. К рычагам и опорной шине кистедержателя кнопками прикреплены ремешки, фиксирующие кисть и пальцы в кистсдержателе. Шарниры рычагов расположены соосно с суставами I, II и III пальцев по принципу кинематического подобия.
Электромеханический привод кистедержателя такой же, как в протезах кистей. Ползун редуктора привода с помощью тяги шарнирно соединен с рычажной системой кистедержателя. Гильзы предплечья и плеча шарнирно соединены между собой механизмом локтя с замком в виде зубчатого сектора и защелки. На гильзе плеча установлен электромеханический привод локтя, состоящий из трех ступеней зубчатых колес и выходной винтовой пары. Ползун винтовой пары шарнирно соединен тягой с гильзой предплечья. При выключенном замке механизма локтевого шарнира привод позволяет осуществлять активное сгибание и разгибание в локтевом суставе. Электронная система управления, как и в протезах с биоэлектрическим управлением, состоит из токоотводящих электродов, усилителя, преобразователя биоэлектрических сигналов, отводимых с паретичных мышц, и источника питания.
Биоэлектрические сигналы паретичных мышц отличаются от сигналов усеченных в результате ампутации мышц и от сигналов мышц в норме. Если биоэлектрические сигналы с усеченных или нормальных мышц имеют непрерывный характер, то сигналы паретичных мышц носят явно выраженный импульсный характер, причем чем выше степень пареза, тем отчетливее он проявляется.
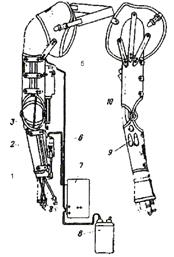
Рис. 5. Ортопедический аппарат на верхнюю конечность с биоэлектрическим управлением.
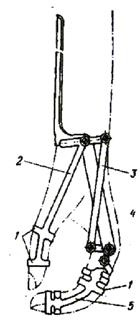
Рис. 6. Кистедержатель.
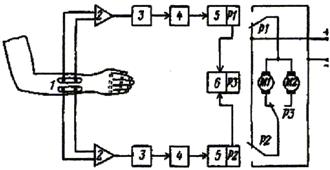
Рис. 7. Блок-схема системы биоэлектрического управления ортопедическим аппаратом.
Зависимость параметров биоэлектрического сигнала паретичных мышц от степени напряжения (сокращения) последних сложна. При небольших напряжениях мышц растет сначала амплитуда, а затем с увеличением напряжения растет частота следования их при относительно постоянной амплитуде.
В связи с этим для управления механизмами аппарата выбран частотный способ биоэлектрического управления. Соответственно этому и строится система управления. Отводимый с мышц сигнал поверхностными электродами 1 (рис. 7) усиливается по амплитуде в усилителе напряжения 2 и поступает в блок частотного выделения информации 3. Если амплитуда импульсов биоэлектрического сигнала превышает порог срабатывания, блок 3 отвечает прямоугольными импульсами определенной амплитуды и длительности. Далее эти импульсы сглаживаются фильтром 4 и усиливаются по мощности в усилителе 5, в нагрузку которого включено реле. Порог срабатывания этого реле определяется числом импульсов в единицу времени, вызывающих срабатывание блока 3.
При срабатывании реле электродвигатель привода подключается к источнику питания. Срабатывание реле во втором канале обеспечивает подключение этого же двигателя к источнику питания в противоположной полярности. Таким образом, двухканальное управление обеспечивает реверсивную работу исполнительного механизма. При подаче сигнала на входы обоих каналов системы управления одновременно срабатывает переключающее устройство 6 и переключает систему управления на другой электродвигатель, как это имеет место и в протезах с двумя управляемыми функциями. Для перехода с управления локтевым механизмом на управление кистедержателем необходимо снова подать на входы системы управления одновременно сигналы с обеих управляющих мышц. В этом случае переключающее устройство снова переключится, но уже в исходное состояние, и реле РЗ возвратится также в исходное положение, а его контакты отключат от системы управления электродвигатель М2 и присоединят к ней электродвигатель Ml .
Питание системы управления, включая и электродвигатели приводов, осуществляется от двух источников. Электронная часть, т. е. усилительные каналы и переключающее устройство питаются от одной батареи аккумуляторов, а электродвигатели Ml и М2 вместе с реле Р1 и Р2 от другой батареи пли от сетевого источника питания. Сетевой источник питания представляет собой обычный двухполупериодный выпрямитель с П- образным индуктивно-емкостным сглаживающим фильтром, питающийся от электроосветительной сети через понижающий трансформатор. Снабжение системы управления двумя источниками питания нацелено на то, чтобы обеспечить дневной расход электроэнергии при пользовании аппаратом в бытовых или производственных условиях.
Основные технические характеристики аппарата
Масса без узла управления и источников питания, не более 1,5 кг
Масса груза, поднимаемого при сгибании в локте, не менее 0,5 кг
Сила схвата, развиваемая кистедержателем, не менее 5 Н
Номинальное напряжение аккумуляторной батареи, не более 15,5 В.
Номинальное напряжение сетевого источника питания 12В.
ЛИТЕРАТУРА
1. Белова А.Н. Нейрореабилитация .-М. Антидор, 2000 г. – 568с.
2. Прикладная лазерная медицина. Под ред. Х.П. Берлиена, Г.И. Мюллера.- М.: Интерэкспорт, 2007г.
3. Александровский А.А. Компьютеризованная кардиология. Саранск; "Красный Октябрь" 2005: 197.
4. Разработка и постановка медицинских изделий на производство. Государственный стандарт Республики БеларусьСТБ 1019-2000.
5. Штарк М.Б., Скок А.Б. Применение электроэнцефалографического биоуправления в клинической практике. М. - 2004 г
6. Боголюбов В.М., Пономаренко Г.Н. Общая физиотерапия. М.,СПб.: СЛП, 2008.
7. Ультрафиолетовое излучение в профилактике инфекционных заболеваний./ А.Л. Вассерман, М.Г. Шандала, В. Г.Юзбашев. М. 2003г.
8-09-2015, 22:54