БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
кафедра ЭТТ
РЕФЕРАТ на тему:
«Протез предплечья с биоэлектрическим управлением двумя функциями. Биоуправляемые протезы плеча »
МИНСК, 2008
Основные характеристики протеза с устройством обратной связи
Порог срабатывания системы управления движениями пальцев кисти 20—30 при нормальных климатических условиях на частоте входного сигнала 100 Гц, мкВ.
Скорость свободного перемещения пальцев кисти изменяется плавно при — плавном изменении величины управляющего сигнала
Пределы регулирования силы схвата - 30Н.
Минимальная величина изменения силы схвата 1 -1,5Н.
Время достижения силы схвата до величины 30 Н, не более 3 с.
Минимальная частота вибрации, соответствующая минимальной силе 2—3 схвата, Гц
Максимальная частота вибрации, соответствующая максимальной силе 40—50 схвата, Гц
Время работы вибратора после прекращения подачи управляющего сигнала, с 1,5—3 Время непрерывной работы протеза при условии, что число циклов сгибания-разгибания пальцев кисти не превышает 500 в день, за один цикл заряда-разряда блока питания, не менее 8 ч.
Потребляемый ток в покое, не более 22 мА.
Напряжение источника питания 12,5 В.
Протез предплечья с биоэлектрическим управлением двумя функциями
Вопрос о биоэлектрическом управлении двумя функциями протеза — сгибанием и разгибанием пальцев искусственной кисти и пронацией и супинацией гильзы предплечья (кисти) может быть решен различными способами. Один способ заключается в создании четырехканальной системы управления, в которой каждый канал обеспечивает независимое управление одним из указанных выше четырех движений двух механизмов (кисти и ротации гильзы предплечья) от четырех мышц культи предплечья. Это может быть сделано простым повторением обычной двухканальной системы управления одной функцией. Достоинствами такой системы являются относительная простота построения схемы и возможность одновременного и независимого управления двумя движениями в различных сочетаниях: сгибание пальцев с одновременной пронацией гильзы предплечья, сгибание пальцев с супинацией гильзы предплечья и т. д. Кроме того, такая система более полно соответствует управлению конечностью в норме. Однако эта система обладает рядом существенных недостатков, снижающих перспективность ее широкого практического применения. Основными из них являются трудность получения четырех независимых сигналов с мышц культи при большом разнообразии травм, и характера ампутации, существенное увеличение габаритных размеров, массы и стоимости системы управления.
Другой способ заключается в последовательном управлении четырьмя движениями исполнительных механизмов от биоэлектрических сигналов двух групп мышц культи — сгибателем и разгибателей кисти, как это имеет место в протезах с одной управляемой функцией. Достоинствами такого способа являются небольшие габаритные размеры и масса системы управления, относительная простота управления, достаточная надежность работы всей системы управления, возможность использования ограниченного числа мышц для управления несколькими движениями, простота тренировки мышц на раздельную и комбинационную посылку управляющих сигналов. Недостаток этого способа — невозможность выполнения одновременно двух движений. Суть способа последовательного управлении состоит в том, что система управления при определенных условиях подключается либо к приводу искусственной кисти, либо к приводу механизма ротации.
Переключение системы производится произвольно, по желанию больного. В общем случае подобная система управления может быть представлена блок-схемой (рис. 1).
Двухканальная система управления состоит из токосъемного устройства 1, предварительных усилителей 2, преобразователей 3, оконечных усилителей 4 с нагрузкой в виде реле 5, как это имеет место в системах релейного управления для протезов с одной управляемой функцией, описанных ранее. Здесь вводится лишь одно новое звено — переключающее устройство б, имеющее в нагрузке реле РЗ, с помощью которого система может быть соединена с одним из двух электродвигателей Ml или М2 приводов кисти или механизма ротации соответственно. В исходном состоянии система управления соединена, например, с приводом кисти и управление осуществляется так же, как и в протезах с одной функцией: сигналы с мышц-сгибателей кисти управляют сгибанием, а с мышц-разгибателей — разгибанием пальцев искусственной кисти. При подаче кратковременного и резкого сигнала с управляющей мышцы срабатывает переключающее устройство б и к системе управления через контакты реле РЗ подключается электродвигатель М2 привода ротации гильзы предплечья. Управление электродвигателем М2 осуществляется так же, как и двигателем Ml , от тех же управляющих мышц, по более медленным сокращением их, чем при переключении, причем полярность включения двигателя М2 выбирают такой, чтобы мышцы-сгибатели управляли пронацией, а мышцы-разгибатели—супинацией гильзы предплечья. Переключение системы снова на управление искусственной кистью производится повторной посылкой кратковременного резкого сигнала с управляющей мышцы, в результате чего переключающее устройство возвращается в исходное состояние, т. е. контакты реле РЗ подключают к системе управления электродвигатель Ml . Переключение возможно как с одной, так и с обеих управляющих мышц.
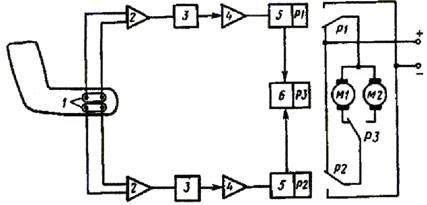
Рис. 1. Блок-схема системы биоэлектрического управления двумя функциями.
Протез предназначен для инвалидов после ампутации предплечья па уровне не ниже средней трети. Протез состоит из следующих основных узлов: кисти 1 (рис. 2) с электромеханическим приводом, механизма активной ротации 2 с электроприводом, гильзы предплечья 5, системы управления, состоящей из предварительных усилителей 3 со стабилизатором питания 4, оконечного усилителя б, переключающего устройства 7.
Оконечный усилитель и переключающее устройство расположены в дистальной части гильзы предплечья. Протез снабжен блоком питания. Кисть и механизм ротации вместе с оконечным усилителем и переключающим устройством образуют один общий узел-полуфабрикат.
Механизм ротации состоит из редуктора цилиндрической формы, в корпусе которого размещен электродвигатель. Редуктор состоит из двух ступеней зубчатой передачи Zi и Z2 (рис. 3), самотормозящейся винтовой пары Z3 и зубчатой передачи с внутренним зацеплением Z4, Z5.
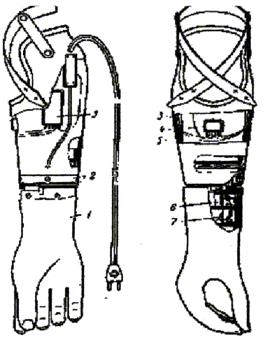
Рис. 2 Протез предплечья с биоэлектрическим управлением с двумя функциями
Максимальный вращающий момент привода составляет 0,5 - 5Н*м; число поворотов — не менее 15 об/мин; масса протезане превышает 1,2 кг.
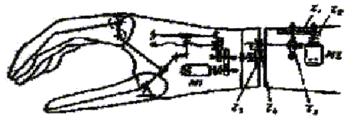
Рис. 3. Кинематическая схема привода ротации кисти.
Система управления в основном такая же, как и для протезов с одной управляемой функцией. В систему управления добавлено лишь электронное переключающее устройство для коммутации системы с управления сгибанием н разгибанием пальцев кисти па управление пронацией и супинацией предплечья и обратно. Блок питания в данном протезе используется такой же, что и в протезе с одной управляемой функцией. Блок-схема биоэлектрической системы пропорционального управления сгибанием и разгибанием пальцев кисти и ротации предплечья представлена на рис. 4.
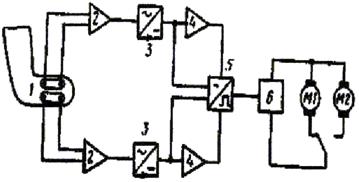
Рис. 4. Блок-схема системы биоэлектрического пропорционального управления двумя функциями.
Как видно из рисунка, принцип действия системы управления тот же, что и системы пропорционального управления кистью в протезе предплечья, а переключающее устройство такое же, как в протезе предплечья. Таким образом, система пропорционального управления двумя функциями действует так же, как и релейная система последовательного управления этими же функциями, с тем лишь различием, что здесь скорость исполнительных органов (пальцев кисти и ротации предплечья) изменяется пропорционально величине входного биоэлектрического (управляющего) сигнала.
Протез предплечья с миотоническим управлением кистью
Протез предназначен для снабжения больных после односторонней или двусторонней ампутации предплечья на уровне не выше 7 см от локтевого сустава. Особенностью данного протеза является так называемая миотоническая система управления, в которой эффект увеличения периметра сокращенных мышц культи используется для воздействия на электронную систему управления через датчик, расположенный над управляющими мышцами.
Протез состоит из искусственной кисти 1 (рис. 5) с электромеханическим приводом, гильзы предплечья 2, системы управления 3 с датчиком 4, расположенных в специальных гнездах па гильзе предплечья, и блока питания 5. В комплект протеза входят также второй блок питания, зарядное устройство и запасная косметическая оболочка на кисть.
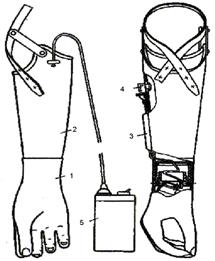
Рис. 5. Протез предплечья с миотоническим управлением кистью.
Кисть с электроприводом, блоки питания и зарядное устройство к ним используются те же, что и в протезах с биоэлектрическим управлением. Гильза предплечья изготовляется из полиэтилена или из слоистого пластика, как и в протезах с биоэлектрическим управлением, по индивидуальному гипсовому слепку. Крепление протеза также обычное, ремешковое или в виде неопадающей гильзы. Система управления состоит из электронного блока и датчика. В датчике в качестве преобразователя механического эффекта сокращающихся мышц в электрический сигнал применены микропереключатели 7 (рис. 6), заключенные в обойму 2 и скрепленные винтами 6. Обойма 2 соединена с основанием 4 датчика пружиной 3.
Усилие от группы управляющих мышц передается на микропереключатели через кнопку 1 и пружину 8. Исходное положение кнопки относительно культи регулируется винтом 5. Для того чтобы исключить строго одновременное срабатывание обоих микропереключателей, один переключатель параллельно смещен относительно другого.
Система управления работает следующим образом. При надавливании мышцами культи на кнопку датчика происходит последовательное переключение контактов микропереключателей, соединенных с различными цепями блока управления и соответственно с исполнительным реверсивным электродвигателем.
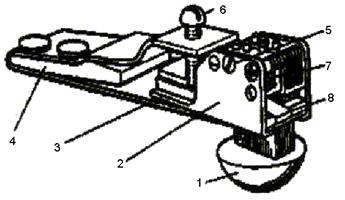
Рис. 6. Датчик миотонической системы управления кистью.
Сгибание или разгибание пальцев искусственной кисти определяется промежутком времени между срабатыванием переключателей.
Характеристики протеза в основном те же, что и в протезах с биоэлектрическим управлением, так как кисть и блок питания в них одинаковы. Разница в массе также незначительна из-за малого различия масс систем управления.
Биоуправляемые протезы плеча
Протезирование больных после ампутации на уровне плеча представляет собой более сложную задачу, чем протезирование на уровне предплечья. О повышением уровня ампутации необходимо возмещение большего числа утраченных функции, а число источников командных сигналов с мышц при этом уменьшается. Кроме того, создание приводов для возмещения утраченной функции локтя, ротации на уровне плеча, функции плечевого сустава представляет собой отдельную сложную техническую проблему. Приводы должны иметь малые габаритные размеры и массу, достаточную мощность для воспроизведения необходимой функции с соответствующей нагрузкой, высокий КПД и т. д. Системы управления протезами плеча должны обеспечивать минимальную физическую и психологическую нагрузку на человека и минимальные компенсаторные движения при управлении протезом, а источники внешней энергии должны обеспечивать дневной расход энергии при пользовании протезом. В настоящее время в практике протезирования применяются протезы с биоэлектрическим и электроконтактным управлением. Проводится протезирование протезами плеча с биоэлектрическим управлением двумя функциями и протезами с биоэлектрическим управлением тремя функциями, а также ортопедическими аппаратами па верхнюю конечность с биоэлектрическим управлением кистедержателем и локтевым шарниром.
Протез плеча с биоэлектрическим управлением кистью
Протез предназначен для снабжения больных после ампутации на уровне плеча в средней трети. Культя должна быть при этом не короче 6 см от переднего края подмышечной впадины и на 6 см должна быть короче плеча здоровой руки. В протезе предусмотрено биоэлектрическое управление от мышц культи сгибанием и разгибанием пальцев искусственной кисти и тяговое управление сгибанием и разгибанием, в локтевом шарнире с пассивной ротацией гильзы предплечья (или кисти). Для биоэлектрического управления кистью используются мышцы плеча: бицепс — для управления сгибанием пальцев, трицепс — для управления их разгибанием. Сгибание в локтевом шарнире осуществляется выборкой тяги за счет движения культи плеча вперед, а открывание и закрывание замка в локтевом шарнире — движением культи вдоль продольной оси. Протез состоит из следующих основных частей: кисти с электромеханическим приводом 1 (рис. 7), механизма пассивной ротации кисти 2, гильзы предплечья 3, локтевого шарнира 4, механизма пассивной ротации плеча 5, гильзы плеча 6, крепления с двумя тягами 7, системы управления 8 и блока питания.
Кисть с электромеханическим приводом и механизм пассивной ротации кисти использованы те же, что и в протезе предплечья.
Система биоэлектрического управления, токосъемное устройство и блок питания те же, что и в протезе предплечья. Общая масса протеза не превышает 1,6—1,8 кг.
Протез плеча с электроконтактным управлением кистью
Протез предназначен для больных после вычленения плеча и после вычленения плеча с удалением части ключицы и лопатки, если имеется возможность сокращать мышцы. Протез может быть назначен также при недоразвитии верхних конечностей, если сила мышц рудиментов превышает 1 Н. Особенностью данной конструкции протеза является наличие электроконтактной системы управления электромеханического привода механизма искусственной кисти.
Протез состоит из следующих основных узлов: кисти 1 (рис. 8) с электромеханическим приводом, гильзы предплечья 2, локтевого механизма 3, гильзы плеча 4, механизма пассивной ротации плеча 5, плечевого шарнира 7, надплечника 8 с креплением 9, системы управления 12 с элсктроконтактным датчиком 11, управляющей тяги 10, блока питании б. На кисть надевается косметическая оболочка (перчатка), изготовленная из поливинилхлорида. Гильзы предплечья и плеча взяты от серийно выпускаемых протезов с тяговым управлением. Плечевой шарнир и локтевой механизм заимствованы также от тяговых протезов. Последний оснащен устройством для компенсации момента силы тяжести предплечья с кистью относительно оси локтевого шарнира.
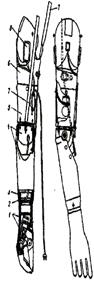
Рис. 7 Протез плеча с биоэлектрическим управлением кистью.
Рис. 8. Протез плеча с электроконтактным управлением кистью.
Система управления в данном протезе используется та же, что и в протезе предплечья с миотоническим управлением.
Управление сгибанием и разгибанием пальцев кисти осуществляется последовательным замыканием контактов микропереключателей посредством движений надплечья, сокращения управляющих мышц или усилий рудиментов недоразвитой конечности в зависимости от вида ампутации или нарушения функций верхней конечности.
ЛИТЕРАТУРА
1. Белова А.Н. Нейрореабилитация .-М. Антидор, 2000 г. – 568с.
2. Прикладная лазерная медицина. Под ред. Х.П. Берлиена, Г.И. Мюллера.- М.: Интерэкспорт, 2007г.
3. Александровский А.А. Компьютеризованная кардиология. Саранск; "Красный Октябрь" 2005: 197.
4. Разработка и постановка медицинских изделий на производство. Государственный стандарт Республики БеларусьСТБ 1019-2000.
5. Штарк М.Б., Скок А.Б. Применение электроэнцефалографического биоуправления в клинической практике. М. - 2004 г
6. Боголюбов В.М., Пономаренко Г.Н. Общая физиотерапия. М.,СПб.: СЛП, 2008.
7. Ультрафиолетовое излучение в профилактике инфекционных заболеваний./ А.Л. Вассерман, М.Г. Шандала, В. Г.Юзбашев. М. 2003г.
8-09-2015, 22:54