Двухосный индикаторный гиростабилизатор телекамеры на ВОГ
Введение
Телевизионная техника применяется в различных областях человеческой деятельности - экономике, искусстве, военном деле и многих других. Область ее применения постоянно расширяется. Это объясняет активное развитие в настоящее время телевизионного и кинотехнического оборудования и применение новейших достижений техники при разработке и производстве устройств для различных видов теле и киносъемки.
К таким устройствам относят гироскопические стабилизаторы (ГС) углового положения телекамеры, которые применяются при съемках с подвижных объектов: вертолета, судна, автомобиля, а также с кранов.
Из требований, предъявляемых к этим устройствам, наиболее важными являются следующие:
— высокая точность стабилизации, обусловленная применением объективов с большим фокусным расстоянием;
— дистанционное управление стабилизатором и телекамерой, что связано с целесообразностью или даже необходимостью размещения телекамеры в месте, недоступном для оператора, например, на кране;
— защита от вибрационных возмущений как с целью обеспечения виброустойчивости гиростабилизатора, так и для повышения качества отснятого материала, снижающегося при поступательном движении телекамеры;
— удобство и простота в обращении, необходимость “защиты от дурака”;
— минимально возможные габариты и масса;
— удобство доступа к стабилизируемой камере;
— высокие скорости (до 120 град./с.) и ускорения (до 200 рад./с.) управления, для получения “динамичного” отснятого материала;
— большие углы прокачки, по некоторым осям равные 360°;
— минимально возможное энергопотребление, т.к. для работы часто используются автономные источники питания (аккумуляторы и т.д.).
— большой диапазон балансировок, необходимость которого вызывается использованием различных типов теле и кинокамер с сильно различающимися массогабаритными показателями.
Из устройств, в наибольшей степени удовлетворяющих перечисленным требованиям, в настоящее время известны и применяются следующие. Это силовой гироскопический стабилизатор "Wesscam" (Канада) и трехосные гиростабилизаторы 1ГСП (разработка МВТУ и НИКФИ), 2ГСП, 4ГСП (разработка МВТУ {МГТУ}).
Первый представляет собой платформу, помещенную в карданов подвес, на которой установлены три двухстепенных гироскопа. Компенсация внешнего момента осуществляется разгрузочным двигателем и маятниковым устройством. Сам карданов подвес крепится к основанию с помощью упругой связи, необходимой для аммортизации устройства при поступательных вибрациях вертолета, автомашины и т.п. Гиростабилизатор помещен в защитную сферу имеющую вырез напротив объектива киноаппарата.
Гиростабилизаторы 1ГСП, 2ГСП, 4ГСП индикаторного типа. Все они в качестве чувствительного элемента используют трехстепенный гироскоп типа МГТУ-05. Также все эти три гиростабилизатора имеют дистанционное управление киноаппаратом и пространственным положением стабилизированной платформы.
Особенностью гиростабилизатора 1ГСП является использование внутреннего карданова подвеса и двухконтурной системы стабилизации с применением маховиков совместно с двигателями стабилизации. К недостаткам этого стабилизатора относятся низкая скорость управления (10 град/сек) и отсутствие защиты от аэродинамических воздействий.
В гиростабилизаторе 2ГСП применен наружный карданов подвес с подшипником большого диаметра и также используется двухконтурная система стабилизации (маховик и двигатели стабилизации). Скорость управления до 30 град/сек. Для защиты от аэродинамических воздействий введен следящий частично прозрачный обтекатель, внутри которого расположен трехосный аммортизатор для предохранения платформы с киноаппаратом от линейных вибраций.
Гиростабилизатор 4ГСП также выполнен с наружным кардановым подвесом. Он имеет скорость управления до 60 град/сек., ограниченную, в основном, скоростью управления примененного чувствительного элемента. Защита от аэродинамических нагрузок отсутствует.
В данной работе продолжены исследования по возможности построения гироскопического стабилизатора углового положения телекамеры, в котором:
—скорость управления обеспечивается не менее 100 град/сек;
—предусмотрено дистанционное управление телекамерой и самим гироcтабилизатором;
—в качестве чувствительного элемента использован волоконно-оптический гироскоп.
В частности, рассматриваются вопросы:
—обеспечения устойчивости канала стабилизации при существенно нежесткой конструкции ГС, нежестком креплении телекамеры к ГС и расположении чувствительного элемента не на стабилизируемом объекте;
—проведено исследование инерционных возмущающих моментов, в том числе моментов возникающих от несимметричности конструкции рам ГС;
— проводилась доработка усилителя мощности с ШИМ;
— предложена конструкция датчика угла фазового типа;
— разработана конструкция двухосного ГС.
Обоснование выбора подвеса гиростабилизатора.
Одним из основных факторов, определяющих выбор принципиальной схемы гиростабилизатора телекамеры, является тип карданова подвеса. В гиростабилизаторе телекамеры может быть использован как внутренний, так и наружный карданов подвес. Сравнительный анализ и конструктивная проработка схем подвесов [3] показывает, что применение наружного карданова подвеса для стабилизатора телекамеры представляется более целесообразным. Это объясняется следующими причинами.
Использование наружного карданова подвеса при больших углах прокачки позволяет получить более компактную конструкцию стабилизированной платформы. В этом случае момент инерции платформы относительно собственной оси вращения значительно снижается, и тогда величина максимального момента двигателя стабилизации, выбираемая из условия обеспечения необходимого углового ускорения платформы при управлении может быть уменьшена. Это позволяет повысить точность стабилизации за счет использования двигателя стабилизации меньших габаритов, имеющего меньший момент сухого трения вокруг оси вращения и меньший коэффициент демпфирования.
Габаритные размеры гиростабилизатора телекамеры с наружным кардановым подвесом оказываются меньше, чем с внутренним, т.к. в последнем случае для получения достаточных рабочих углов поворота платформы необходимо выполнение подвеса по гантельной схеме, что приводит к значительному увеличению одного габаритного размера гиростабилизатора по сравнению с другим. Применение наружного карданова подвеса позволяет добиться минимального различия между габаритными размерами гиростабилизатора по взаимноперпендикулярным осям, что является желательным.
В то же время схема гиростабилизатора с наружным кардановым подвесом имеет следующие недостатки:
— увеличенный возмущающий инерционный момент, действующий вокруг оси наружной рамы подвеса, который возникает при переносных поворотах основания гиростабилизатора;
— пониженная жесткость рам наружного карданова подвеса по сравнению с внутренним.
Возмущающий инерционный момент, действующий по оси наружной рамы карданова подвеса, вызывает появление ошибок стабилизации, а также создает дополнительные нагрузки на приводы. Однако, как показывают исследования, в реальных условиях эксплуатации гиростабилизатора киноаппарата на кране и на вертолете [8,9], величина инерционного момента при симметричной конструкции рам оказывается незначительной. В связи с этим первый из перечисленных недостатков наружного карданова подвеса оказывается несущественным.
В представленном двухосном гиростабилизаторе телекамеры применен наружный карданов подвес.
Конструкция подвеса гиростабилизатора позволяет получить угол прокачки по оси тангажа +60...-80 град., а по оси курса угол вращения не ограничен.
Описание особенностей конструкции гиростабилизатора.
Особенностью данного ГС является выполнение наружной рамы в виде Г-образной конструкции. Это позволяет уменьшить габариты ГС и упростить доступ к телекамере. Однако такая конструкция является существенно несимметричной, что вызывает появление дополнительных возмущающих моментов из-за значительных по величине центробежных моментов инерции рам. Исследование этих возмущающих моментов проведено в разделе “Анализ инерционных возмущающих моментов”.
Кроме того, требования по минимизации масс, моментов инерции, требования по динамике управления платформой приводят к тому, что наружная рама оказывается существенно нежесткой. А так как при этом необходимо учитывать требования по высокой точности стабилизации при значительных возмущающих моментах, то возникает необходимость в проведении специальных исследований по вопросам обеспечения устойчивости канала стабилизации. В частности, исследований по расположению ЧЭ в конструкции ГС. Исследование устойчивости канала стабилизации приведено в разделе “Исследование влияния нежесткостей элементов гиростабилизатора на его устойчивость”.
Особенностью данной конструкции ГС является то, что стабилизация положения телекамеры по курсу осуществляется косвенным образом, путем стабилизации положения наружной рамы карданова подвеса. Эта особенность также учтена в разделе “Исследование влияния нежесткостей элементов ГС на его устойчивость”.
Из требований по минимизации энергопотребления вытекает необходимость увеличения КПД канала стабилизации. Согласно этому требованию, а также с целью получения значительных по величине моментов привода, в качестве привода используется редукторный привод со встречным включением двигателей стабилизации серии ДПР. Кроме того, использование в качестве ЧЭ волоконно-оптического гироскопа позволяет снизить энергопотребление собственно ЧЭ до 3 Вт, как в режиме измерения, так и при управлении положением стабилизированной платформы.
Наиболее существенное влияние на КПД электронной части канала стабилизации оказывает коэффициент полезного действия УМ. Поэтому УМ выполнен импульсным, с использованием ШИМ модуляции выходного напряжения. Это позволяет примерно в два раза увеличить КПД УМ по сравнению с линейными схемами УМ. Однако все импульсные УМ являются мощными источниками электромагнитных помех, поэтому в данной конструкции ГС УМ располагается на самом ГС, в непосредственной близости от двигателей стабилизации. Кроме того, непосредственно на ГС расположены схемы защиты ВОГа.
Конструкция крепления телекамеры позволяет проводить установку на платформу телекамер отличающихся по массогабаритным параметрам от базовой на ± 30 %. При этом осуществляется независимая регулировка положения телекамеры по трем взаимоперпендикулярным осям.
Применение в качестве ЧЭ ВОГа вместо механических гироскопов позволяет практически снять ограничения по максимальным скоростям измерения и управления, накладываемых на канал стабилизации самим ЧЭ.
АНАЛИЗ ИНЕРЦИОННЫХ ВОЗМУЩАЮЩИХ МОМЕНТОВ.
При несимметричной конструкции рам гиростабилиза-тора и значительных угловых скоростях движения основания и управления платформой необходимо учитывать возмущающие моменты, вызываемые осевыми и центробежными моментами инерции рам.
В данной работе проводится исследование инерционных возмущающих моментов для двухосного гиростабилизатора, с учетом влияния центробежных моментов инерции рам и скоростей управления платформой.
Выражения для инерционных моментов получены путем раскрытия членов, зависящих от параметров движения основания и платформы входящих в динамические уравнения Эйлера. Основные математические преобразования выполнялись с помощью программы “DERIVE”.
Системы координат и обозначения используемые далее.
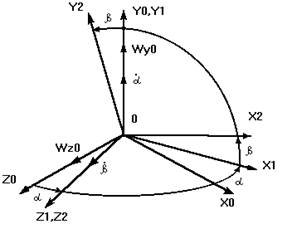
Рис.1.
X0 ,Y0 ,Z0 - система координат связанная с основанием.
X1 ,Y1 ,Z1 - система координат связанная с наружной
рамой.
X2 ,Y2 ,Z2 - система координат связанная с платформой.
Qij - момент количества движения j-го тела по i-й
оси.
wij - угловая скорость j-го тела по i-й оси.
wij ' - угловое ускорение j-го тела по i-й оси.
Ji - осевые моменты инерции тела относительно i-й
оси.
Jij - центробежные моменты инерции.
Mij - внешние возмущающие моменты действующие
на j-е тело по i-й оси.
a - угол поворота наружной рамы по оси Y1 .
a' - угловая скорость вращения наружной рамы по
оси Y1 .
a'' - угловое ускорение наружной рамы по оси Y1 .
b - угол поворота платформы по оси Z2 .
b' - угловая скорость вращ. платформы по оси Z2 .
b'' - угловое ускорение платформы по оси Z2 .
Динамические уравнения Эйлера для i-го тела имеют вид:
dQxi /dt - Qyi ×wzi + Qzi ×wyi = Mxi
dQyi /dt - Qzi ×wxi + Qxi ×wzi = Myi
dQyi /dt - Qzi ×wxi + Qxi ×wzi = Myi
В случае двухосного гиростабилизатора эти уравнения преобразуются в следующую форму:
а) для наружной рамы:
dQy1 /dt - Qz1 ×wx1 + Qx1 ×wz1 = My1
б) для платформы:
dQx2 /dt - Qy2 ×wz2 + Qz2 ×wy2 = Mx2
dQy2 /dt - Qz2 ×wx2 + Qx2 ×wz2 = My2 (1)
dQz2 /dt - Qx2 ×wy2 + Qy2 ×wx2 = Mz2
Полный момент количества движения наружной рамы в проекциях на оси X1 , Y1 , Z1 определяется следующими выражениями:
Qx1 = Jx1 ×wx1 - Jxy1 ×wy1 - Jxz1 ×wz1
Qy1 = Jy1 ×wy1 - Jyx1 ×wx1 - Jyz1 ×wz1 (2)
Qz1 = Jz1 ×wz1 - Jzx1 ×wx1 - Jzy1 ×wy1
Полный момент количества движения платформы в проекциях на оси X2 , Y2 , Z2 определяется следующими выражениями:
Qx2 = Jx2 ×wx2 - Jxy2 ×wy2 - Jxz2 ×wz2
Qy2 = Jy2 ×wy2 - Jyx2 ×wx2 - Jyz2 ×wz2 (3)
Qz2 = Jz2 ×wz2 - Jzx2 ×wx2 - Jzy2 ×wy2
Кинематические уравнения двухосного гиростаби-лизатора, для расположения координатных осей приве-денного на рис.1, имеют вид:
а) для наружной рамы:
wx1 = wx0 ×cos(a) - wz0 ×sin(a)
wy1 = wy0 + a' (4*)
wz1 = wx0 ×sin(a) + wz0 ×cos(a)
wx1 ' = wx0 '×cos(a) - wz0 '×sin(a)
wy1 ' = wy0 ' + a'' (4*')
wz1 ' = wx0 '×sin(a) + wz0 '×cos(a)
б) для платформы:
wx2 = wx1 ×cos(b) + wy1 ×sin(b)
wy2 = wy1 ×cos(b) - wx1 ×sin(b) (5*)
wz2 = wz1 + b'
wx2 ' = wx1 '×cos(b) + wy1 '×sin(b)
wy2 ' = wy1 '×cos(b) - wx1 '×sin(b) (5*')
wz2 ' = wz1 ' + b''
Из 2-го уравнения в (5*) следует, что:
wy1 =wx1 ×tg(b)+wy2 /cos(b)
Из 2-го уравнения в (5*') следует, что:
wy1 '=wx1 '×tg(b)+wy2 '/cos(b)
Тогда, учитывая, что wy2 , wz2 , wy2 ', wz2 ' являются параметрами движения стабилизированного объекта, т.е. заданы, кинематические уравнения можно переписать в следующем виде:
wx1 = wx0 ×cos(a) - wz0 ×sin(a)
wy1 = wx1 ×tg(b)+wy2 /cos(b) (4)
wz1 = wx0 ×sin(a) + wz0 ×cos(a)
wx1 ' = wx0 '×cos(a) - wz0 '×sin(a)
wy1 ' = wx1 '×tg(b)+wy2 '/cos(b) (4')
wz1 ' = wx0 '×sin(a) + wz0 '×cos(a)
wx2 = wx1 ×cos(b) + wy1 ×sin(b) (5)
wx2 ' = wx1 '×cos(b) + wy1 '×sin(b) (5')
Подставляя выражения для полных моментов количества движения (2), (3) в динамические уравнения Эйлера (1), получаем следующий вид уравнений движения наружной рамы и платформы:
Jy1 ×wy1 ' + (Jx1 -Jz1 )×wx1 ×wz1 + Jzx1 ×wx1 2 - Jxz1 ×wz1 2 +
+ Jzy1 ×wx1 ×wy1 - Jxy1 ×wy1 ×wz1 - Jyx1 ×wx1 ' - Jyz1 ×wz1 ' = My1 (6.1)
Jx2 ×wx2 ' + (Jz2 -Jy2 )×wy2 ×wz2 - 2×Jzy ×wy2 2 + Jyz2 ×wz2 2 +
+ Jyx2 ×wx2 ×wz2 - Jzx2 ×wx2 ×wy2 - Jxz2 ×wz2 ' - Jxy2 ×wy2 ' = Mx2 (6.2)
Jy2 ×wy2 ' + (Jx2 -Jz2 )×wx2 ×wz2 + Jzx2 ×wx2 2 - Jxz2 ×wz2 2 +
+ Jzy2 ×wx2 ×wy2 - Jxy2 ×wy2 ×wz2 - Jyx2 ×wx2 ' - Jyz2 ×wz2 ' = My2 (6.3)
Jz2 ×wz2 ' + (Jy2 -Jx2 )×wx2 ×wy2 + Jxy2 ×wy2 2 - Jyx2 ×wx2 2 +
+ Jxz2 ×wy2 ×wz2 - Jyz2 ×wx2 ×wz2 - Jzx2 ×wx2 ' - Jzy2 ×wy2 ' = Mz2 (6.4)
При отсутствии моментов внешних сил правые части уравнений (6.2), (6.3), (6.4) обращаются в нуль, а правая часть (6.1) представляет собой момент реакции со стороны платформы на внешнюю раму вокруг оси Y1 . Обозначив левые части уравнений (6.1), (6.2), (6.3) буквами A, B и C, соответственно, получаем выражение для полного инерционного момента относительно оси внешней рамы:
My1ин = A + B × sin(b) + C × cos(b) (7)
Раскрыв в (7) сокращения A, B и C и преобразовав получаем выражение для полного инерционного момента Мy1ин .
Мy1ин =Jxz1 ·{wx1 2 -wz1 2 }+
+Jxz2 ·cos(b)·wx2 2 -Jyz2 ·sin(b)·wy2 2 +
+{Jyz2 ·sin(b)-Jxz2 ·cos(b)}·wz2 2 +
+{Jyz2 ·cos(b)-Jxz2 ·sin(b)}·wx2 ·wy2 +
+{Jxy2 ·sin(b)+(Jx2 -Jz2 )·cos(b)}·wx2 ·wz2 +
+{(Jz2 -Jy2 )·sin(b)-Jxy2 ·cos(b)}·wz2 ·wy2 +(8)
+{Jx2 ·sin(b)-Jxy2 ·cos(b)}·wx2 ' +
+{Jy2 ·cos(b)-Jxy2 ·sin(b)}·wy2 '-
-{Jxz2 ·sin(b)+Jyz2 ·cos(b)}·wz2 '+
+Jyz1 ·wx1 ·wy1 -
-Jxy1 ·wz1 ·wy1 +
+(Jx1 -Jz1 )·wx1 ·wz1 -
-Jxy1 ·wx1 '-
-Jyz1 ·wz1 '+
+Jy1 ·wy1 '
После подстановки в полученные выражения для инерционных моментов Мy1ин , Mz2ин кинематических уравнений (4), (4'), (5), (5') и преобразования, получим следующий вид выражений для Мy1ин , Mz2ин :
MZ2ИН ={cos(2·b)-2}·cos(a)2 ·tg(b)2 ·Jxy2 (·wx0 2 +wz0 2 )+
+{2·tg(b)2 ·sin(b)2 -2·cos(b)2 +4}·sin(a)·cos(a)·Jxy2 ·wx0 ·wz0 +
+{(Jy2 -Jx2 )/cos(b)-2·Jxy2 ·sin(b)(1+tg(b)2 )}·cos(a)·wx0 ·wy2 +
+Jyz2 ·wz0 ·wz2 ·(sin(a)-cos(a))/cos(b)-
-Jxz2 ·wx0 '·cos(a)/cos(b)+
+{2·Jxy2 ·(sin(b)·tg(b)2 +sin(b))·sin(a)+(Jx2 -Jy2 )·sin(a)/cos(b)}·wy2 ·wz0 +
+Jxz2 ·wz0 '·sin(a)/cos(b)+
+{Jxz2 -Jyz2 }·wy2 ·wz2 ·tg(b)+
+{(Jy2 -Jx2 )·tg(b)+Jxy2 ·(1-tg(b)2 )}·wy2 2 -
-{Jxz2 ·tg(b)+Jyz2 }·wy2 '+
+Jz2 ·wz2 '
(9)
My1ин ={[Jxz2 ·(tg(b)4 +2/cos(b)2 -1)·cos(b)3 +Jyz1 ·tg(b)+Jxz1 ]·cos(a)2 +
+[[(Jx1 -Jz1 )-Jxy1 ·tg(b)]·cos(a)-Jxz1 ·sin(a)]·sin(a)}·wx0 2 +
+{[[Jxy1 ·tg(b)+(Jz1 -Jx1 )]·sin(a)-Jxz1 ·cos(a)]·cos(a)+
+[Jxz2 ·cos(b)3 ·[2/cos(b)2 +tg(b)4 -1]+Jyz1 ·tg(b)+Jxz1 ]·sin(a)2 }·wz0 2 +
+{(Jx1 -Jz1 )·cos(2·a)+[1-tg(b)4 -2/cos(b)2 ]·Jxz2 ·cos(b)3 ·sin(2·a)-
-[Jyz1 ·tg(b)+2·Jxz1 ]·2·sin(a)·cos(a)-
-Jxy1 ·tg(b)·cos(2·a)}·wx0 ·wz0 +
+{[Jxy2 ·sin(b)·cos(b)(tg(b)2 +1)+(Jx2 -Jz2 )]·cos(a)}·wx0 ·wz2 +
+{[Jxz2 ·sin(b)·cos(b)+Jxz2 ·sin(b)3 /cos(b)+Jyz2 ]·cos(a)+
+[Jyz1 ·cos(a)-Jxy1 ·sin(a)]/cos(b)}·wx0 ·wy2 -
-{[Jxz2 ·sin(b)·cos(b)·(1+tg(b)2 )+Jyz2 ]·sin(a)+
+[Jyz1 ·sin(a)+Jxy1 ·cos(a)]/cos(b)}·wz0 ·wy2 +
+{-[tg(b)2 +1]·sin(b)·cos(b)·Jxy2 +(Jz2 -Jx2 )]·sin(a)}·wz0 ·wz2 +
+{[Jx2 ·sin(b)·cos(b)·(1+tg(b)2 )+Jy1 ·tg(b)-(Jxy1 +
+Jxy2 )]·cos(a)-Jyz1 ·sin(a)}·wx0 '+
+{[-Jx2 ·sin(b)·cos(b)·(1+tg(b)2 )+(Jxy1 +Jxy2 )-
-Jy1 ·tg(b)]·sin(a)-Jyz1 ·cos(a)}·wz0 '+
+{Jyz2 ·sin(b)-Jxz2 ·cos(b)]·wz2 2 -
-{Jxz2 ·sin(b)+Jyz2 ·cos(b)}·wz2 '+
+{(Jx2 -Jy2 )·sin(b)+Jxy2 ·cos(b)·(tg(b)2 -1)}·wz2 ·wy2 +
+{Jx2 ·sin(b)2 /cos(b)-2·Jxy2 ·sin(b)+Jy2 ·cos(b)+Jy1 /cos(b)}·wy2 '
Анализ инерционных возмущающих моментов для различных режимов работы гиростабилизатора.
Численный анализ инерционных возмущающих моментов (9) провожу для различных режимов работы ГС, типовая конструкция которого приведена на рис 2.
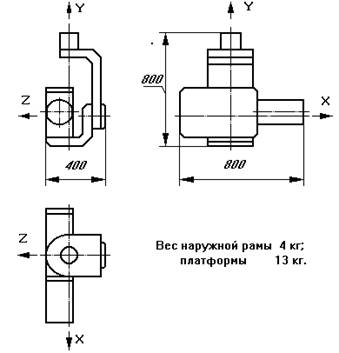
Рис.2.
Пусть ГС имеет следующие инерционные параметры наружной рамы и платформы:
Jx1 = -------//------ Jx2 = 2000 гсмс2 = 0.2 кгм2
Jy1 = 1500 гсмс2 = 0.15 кгм2 Jy2 = 9500 гсмс2 = 0.95 кгм2
Jz1 = -------//------ Jz2 = 10000 гсмс2 = 1 кгм2
Jxy1 = Jyx1 = 0 Jxy2 = Jyx2 = 0.0085 кгм2
Jxz1 = Jzx1 = 0 Jxz2 = Jzx2 = 0.023 кгм2
Jzy1 = Jyz1 =1500 гсмс2 = 0.15 кгм2 Jzy2 = Jyz2 = 0.04 кгм2
Угловые скорости и ускорения основания и управления платформой принимаю равными их типовым значениям при работе гиростабилизатора на кране.
wx0 = ±1 рад/с wy2 = ±2 рад/с
wy0 = ±1 рад/с wz2 = ±2 рад/с
wz0 = ±1 рад/с wy2 ' = ±3 рад/с2 (10)
wx0 '= ±0,2 рад/с2 wz2 ' = ±3 рад/с2
wy0 '= ±0,2 рад/с2
wz0 '= ±0,2 рад/с2
Углы прокачки рам изменяются в диапазоне:
a = ± 2 рад. »± 120 град. (10)
b = ±1 рад. »± 60 град.
Исследование величины численных значений инерционных возмущающих моментов провожу с помощью программы “MOMIN” листинг которой приведен в “Приложении 1”.
Анализ инерционных возмущающих моментов провожу для следующих случаев работы гиро-стабилизатора:
1) Работа на неподвижном основании при наличии скоростей управления платформой;
2) Работа на подвижном основании при неподвижной платформе;
3) Работа на подвижном основании при управляемой платформе;
1) Работа ГС на неподвижном основании при управляемой платформе,
т.е. при условии:
wx0 = wy0 = wz0 = wx0 ' = wy0 ' = wz0 ' = 0 (11)
a¹ 0; b¹ 0; wy2 ¹ 0; wz2 ¹ 0; wy2 ' ¹ 0; wz2 ' ¹ 0
Тогда подставляя (11) в выражения для инерционных моментов (9), получаем следующий их вид:
MZ2ИН =+{Jxz2 -Jyz2 }·wy2 ·wz2 ·tg(b)+
+{(Jy2 -Jx2 )·tg(b)+Jxy2 ·(1-tg(b)2 )}·wy2 2 -
-{Jxz2 ·tg(b)+Jyz2 }·wy2 '+
+Jz2 ·wz2 '
MY1ИН =+{Jyz2 ·sin(b)-Jxz2 ·cos(b)}·wz2 2 -
-{Jxz2 ·sin(b)+Jyz2 ·cos(b)}·wz2 '+
+{(Jx2 -Jy2 )·sin(b)+Jxy2 ·cos(b)·(tg(b)2 -1)}·wz2 ·wy2 +
+{Jx2 ·sin(b)2 /cos(b)-
-2·Jxy2 ·sin(b)+Jy2 ·cos(b)+Jy1 /cos(b)}·wy2 '
Максимальные значения инерционных моментов, полученные при выполнении условий (10), следующие:
а) ось Y1 : Мy1ин = Мин + Мцб = 5.68 + 0.14 = 5.82 Н×м.
при a = 0.067 рад.
b = 1 рад.
wy2 = -2.0 рад/с.
wy2 ' = 3.0 рад/с2 .
wz2 = 2 рад/с.
wz2 ' = -3.0 рад/с2 .
где Мин - вклад в Мy1ин возмущающих моментов, связаных с осевыми моментами инерции наружной рамы и платформы;
Мцб - вклад в Мy1ин возмущающих моментов, связаных с центробежными моментами инерции наружной рамы и платформы;
Вклад Мцб в суммарный возмущающий момент составил:
К=2.38 %
б) ось Z2 : Мz2ин = Мин + Мцб = 7.67 + 0.33 = 8.0 Н×м.
при a = 0.067 рад.
b = 1 рад.
wy2 = 2.0 рад/с.
wy2 ' = -3.0 рад/с2 .
wz2 = -2 рад/с.
wz2 ' = 3.0 рад/с2 .
Вклад Мцб в суммарный возмущающий момент составил:
К =4.2 %
2) Работа ГС на подвижном основании при неподвижной платформе,
т.е. при:
wy2 = wy2 '= wz2 = wz2 ' = 0; a¹ 0; b¹ 0; (12)
wx0 ¹ 0; wy0 ¹ 0; wz0 ¹ 0; wx0 ' ¹ 0; wy0 ' ¹ 0; wz0 ' ¹ 0
Тогда подставляя (12) в выражения для инерционных моментов (9) получаем следующий их вид:
MZ2ИН ={cos(2·b)-2}·cos(a)2 ·tg(b)2 ·Jxy2 (·wx0 2 +wz0 2 )+
+{2·tg(b)2 ·sin(b)2 -2·cos(b)2 +4}·sin(a)·cos(a)·Jxy2 ·wx0 ·wz0 +
-Jxz2 ·wx0 '·cos(a)/cos(b)+
+Jxz2 ·wz0 '·sin(a)/cos(b)+
MY1ИН ={[Jxz2 ·(tg(b)4 +2/cos(b)2 -1)·cos(b)3 +Jyz1 ·tg(b)+
+Jxz1 ]·cos(a)2 +
+[[(Jx1 -Jz1 )-Jxy1 ·tg(b)]·cos(a)-Jxz1 ·sin(a)]·sin(a)}·wx0 2 +
+{[[Jxy1 ·tg(b)+(Jz1 -Jx1 )]·sin(a)-Jxz1 ·cos(a)]·cos(a)+
+[Jxz2 ·cos(b)3 ·[2/cos(b)2 +tg(b)4 -1]+Jyz1 ·tg(b)+
+Jxz1 ]·sin(a)2 }·wz0 2 +
+{(Jx1 -Jz1 )·cos(2·a)+[1-tg(b)4 -2/cos(b)2 ]·Jxz2 ·cos(b)3 ·
·sin(2·a)-[Jyz1 ·tg(b)+2·Jxz1 ]·2·sin(a)·cos(a)-
-Jxy1 ·tg(b)·cos(2·a)}·wx0 ·wz0 +
+{[Jx2 ·sin(b)·cos(b)·(1+tg(b)2 )+Jy1 ·tg(b)-(Jxy1 +Jxy2 )]·cos(a)-
-Jyz1 ·sin(a)}·wx0 '+
+{[-Jx2 ·sin(b)·cos(b)·(1+tg(b)2 )+(Jxy1 +Jxy2 )-Jy1 ·tg(b)]·sin(a)-
-Jyz1 ·cos(a)}·wz0 '+
При этом получены следующие максимальные значения инерционных возмущающих моментов:
а) ось Y1 :
Мy1ин = Мин + Мцб = 0.154 + 0.551= 0.705 Н×м.
при a = - 0.82 рад.
b = 1 рад.
wx0 = wz0 = 1 рад/с.
wx0 ' = wz0 ' = 0.2 рад/с2 .
wy0 = 0.167 рад/c.
wy0 ' = 0.167 рад/с2 .
Вклад Мцб в суммарный возмущающий момент составил:
К= 78.14 %
б) ось Z2 :
Мz2ин = Мин + Мцб = 0 + 0.07= 0.07 Н×м.
при a = - 0.785 рад.
b = 1 рад.
wx0 = wz0 = 1 рад/с.
wx0 ' = wz0 ' = 0.2 рад/с2 .
wy0 = 0.167 рад/с.
wy0 ' = 0.167 рад/c2
Вклад Мцб в суммарный возмущающий момент составил:
К = 100 %
3) Работа ГС на подвижном основании при управляемой платформе.
При подвижном основании и управляемой платформе инерционные возмущающие моменты
29-04-2015, 01:59