СОДЕРЖАНИЕ
Задание на проектирование.
Введение.
1.Построениние переходной характеристики ОУ.
2.Апроксимация переходной характеристики ОУ.
3.Выбор типа регулятора и закона регулирования.
4.Определение стойкости АСР.
5.Разработка функциональной схемы АСР.
6.Выбор элементной базы.
7.Разработка принципиально - монтажной
схемы АСР.
8.Разработка информационного обеспечения АСР.
9.Выводы.
Литература.
ЗАДАНИЕ НА ПРОЕКТИРОВАНИЕ
Параметры объекта
Т1,с = 35
Т2,с =70
τтр,с =20
К0,% Х.Р.О.= 2
Требования технологии
Узад=Уст1,А=70
доп,А = 5
А1доп,А=12
tрег, доп,с = min,
t max,% ХРО = 20
Система регулирования должна отвечать следующим требованиям технологии:
Система должна быть максимально быстродействующей.
Реализовывать переходные процессы с заданным качеством.
Иметь внешнее управление заданием.
Иметь ручной режим управления ИМ.
Иметь дополнительные функции по сигнализации положения регулируемой величины.
ВВЕДЕНИЕ.
Автоматизация производства – одно из главных направлений комплексной программы научно-технического прогресса. Главная цель – обеспечить оптимальное течение технического процесса в реальных условиях при достижении заданного качества и эффективности.
Надёжность и достоверность технологического контроля и автоматического управления во многом определяются качеством наладки контрольно – измерительных приборов, средств автоматизации, систем и устройств технологической сигнализации, защиты и блокировки.
Пищевые производства основаны на химико-технических процессах. Развитие пищевой технологии привело к созданию аппаратов большой единичной мощности, и привело к необходимости созданию автоматизации этих производств.
Измерительные приборы и автоматические устройства обеспечивают оптимальное протекания технологического процесса, недоступное ручному управлению. Поэтому автоматизация позволяет наиболее эффективно использовать все ресурсы пищевого производство, улучшить качество выпускаемой продукции и значительно повысить производительность труда.
В зависимости от роли человека различают в управлении автоматически и автоматизированные системы управления (АСУ).
Автоматизированные системы управления технологическим процессом (АСУТП) представляет собой организационно техническую систему управления технологическим процессом. В целом в соответствии с принятым критериям управления, в котором для сбора и обработки информации используется вычислительная техника. Роль человека сводиться к содержательному участию в выработке решений там, где задачи могут быть формализованы и их выполнение, не может быть полностью автоматизировано.
В соответствии с существующей терминологией автоматические системы управления принадлежат к той же области АСУТП, но являются высшей ступенью их развития, на которой человек полностью выведен из процесса непосредственного управления.
Комплекс технических средств АСУТП включает и средство локального контроля, сигнализации, регулирования, которые могут функционировать автономно.
Автоматизация производства – непрерывно развивающийся процесс, причём истинностью его развития является то, что переход к более высокой ступени не означает помимо исчезновения характерных черт развития на лучшей ступени, так как каждая последующая ступень является продолжением и развитием низшей ступени.
Анализ структурных схем автоматической системы регулирования (АСР) показывает, что основным элементом системы является объект управления, без которого, какой либо разговор о системе управления теряет всякий смысл.
Объект управления (регулирования) – это промышленная установка, в которой есть необходимость управлять технологическим процессом автоматически, следовательно, без участия человека. Очевидно, что при создании АСР свойства объекта управления будет играть существенное значение при выборе элементов для реализации этой системы, а также на свойства системы в целом. При этом надо отменить, что если характеристиками элементов можно как – то варьировать, то свойства объекта управления остаются, практически неизменными. Поэтому изучение характеристик объекта управления относятся к одной из основных задач теории автоматического управления и регулирования.
В данной курсовой работе Я разрабатываю АСР для молотковой дробилки типа ДДМ-1, в соответствии с требованием данной технологии. Обеспечить оптимальный режим работы в выборе типа регулятора и закона регулирования, в соответствии с параметрами объекта. Моя система должна обладать достаточным запасом устойчивости.
Данная курсовая работа имеет следующие сокращения:
АСР – автоматическая система регулирования;
ОУ – объект управления;
РВ – регулируемая величина;
П; ПИ; ПИД – относительные законы
регулирования;
АР – автоматический регулятор;
АФЧХ – амплитудно фаза - частотная
характеристика;
ДУ – дифференциальное управление;
1. ПОСТРОЕНИЕ ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ ОУ.
В качестве ОУ для всех вариантов даны технологические аппараты, которые описываются дифференциальными уравнениями второго порядка, которые имеют вид:

где - рост температуры в печи (˚С)
t - время (мин; сек)
 - запаздывание
(мин; сек)
- запаздывание
(мин; сек)
Уравнение (1.1) - это обычное линейное дифференциальное уравнение второго порядка с постоянным коэффициентом и запаздыванием.
В ТАУ принято
ДУ записывать
таким образом,
чтобы в правой
половине находилась
входная величина
и её производная
и запись
показывает,
что с момента
введения входного
сигнала должно
пройти t времени
до того времени,
пока начнет
изменяться
выходная величина,
при изменении
на величину
ТАУ принято
ДУ записывать
таким образом,
чтобы в правой
половине находилась
входная величина
и её производная
и запись
показывает,
что с момента
введения входного
сигнала должно
пройти t времени
до того времени,
пока начнет
изменяться
выходная величина,
при изменении
на величину
,а в левой - выходная величина и ее производная.
Р
 ешением
уравнения (1.1)
есть уравнение
функции
ешением
уравнения (1.1)
есть уравнение
функции
по которой
можно построить
переходную
характеристику
ОУ при известном
значении входного
действия .
В результате исследования реального ОУ для вычисления его динамических параметров необходимо провести цикл экспериментов для вычисления Т1,
Т2, Ко.
В случае, когда эти параметры известны или заданы, по ним можно смоделировать переходной процесс.
Для этого выполняем следующие действия:
З
 аписываем
уравнение
статики
аписываем
уравнение
статики
которое получаем из уравнения (1.1).
2) Чтобы рассчитать переходной процесс в динамике необходимо решить уравнение 1.1. Его решение при нулевых начальных условиях имеет вид:

где e --- основа натурального логарифма
t --- время
С
помощью уравнения
(1.2) можно рассчитать
переходную
характеристику
объекта.
Вычисляем
приблизительную
длительность
процесса по
формуле:
tп ≈ 3(Т1+Т2) (1.3)
Время tп разделим на 20 – 25 одинаковых интервалов. Подставим свои значения в формулу 1.3.
tп ≈ 3(35+70) = 315;
Тогда интервал равен t ≈ 315:25=12,6 мин.
Примем интервал = 13.
Теперь подставим в уравнение (1.2) значение времени (t) кратные выбранному интервалу, найдём значение выходной величины в выборе момента времени.
Результат подсчетов запишем в виде таблицы.
Таблица 1.1
|
Время tмин (с) |
Регулируемая величина ∆У,С |
| 0,0 | 0,00 |
| 20,0 | 0,00 |
| 33,0 | 0,57 |
| 46,0 | 1,93 |
| 59,0 | 3,65 |
| 72,0 | 5,50 |
| 85,0 | 7,32 |
| 98,0 | 9,03 |
| 111,0 | 10,58 |
|
124,0 |
11,97 |
| 137,0 | 13,19 |
| 150,0 | 14,24 |
| 163,0 | 15,15 |
| 176,0 | 15,92 |
| 189,0 | 16,58 |
| 202,0 | 17,14 |
| 215,0 | 17,61 |
| 228,0 | 18,00 |
| 241,0 | 18,33 |
| 254,0 | 18,61 |
Необходимо иметь в виду, что из-за появления транспортного запаздывания, все значения ДУ будут сдвинуты на величину Т. По найденным значениям на мелиметровке строим график.
2.АППРОКСИМАЦИЯ ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ.
При анализе свойств элементов АСР в основном используют аппроксимированные характеристики для упрощения процесса анализа и уменьшения количества расчетов.
Так элемент, что является апериодическим типовым звеном второго порядка можно аппроксимировать, как апериодическое звено первого порядка последовательно соединенного с запаздывающим звеном.
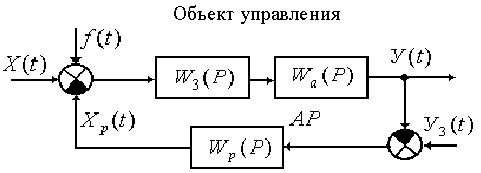
Таким образом, мой ОУ может быть представлен как аналогичное соединение с такой разницей, что запаздывающее звено будет иметь как чистое транспортное запаздывание, так и емкостное за счет инерционности апериодического звена. Соединение имеет вид: Рисунок 2.1

Объект управления.
Аппроксимацию можно выполнить как аналитическим, так и графическим способом. Выполняем графическим способом. Наиболее простой из графических методов, является «метод касательной».
Определив параметры ОУ при помощи этого метода, по построенному графику.
У
равнение
апериодического
звена первого
порядка имеет
вид:
а
его решение
при начальных
нулевых условиях;
без учёта τ0
:
где Т0 – параметр, найденный по графику методом «касательной».
Аналогично первому графику рассчитаем график переходного процесса в аппроксимированном ОУ по уравнению (1.4), приняв tп=3Т0. tп=3143=429; Находим интервал таким же образом, но без учёта запаздывания.
Результаты записываем в таблицу: Таблица 2.1
|
Время tмин (с) |
Регулируемая величина ∆У(С) |
| 0,0 | 0,00 |
| 33,0 | 0,00 |
| 54,5 | 2,79 |
| 75,9 | 5,18 |
| 97,4 | 7,25 |
| 118,8 | 9,02 |
| 140,3 | 10,55 |
| 161,7 | 11,87 |
| 183,2 | 13,00 |
| 204,6 | 13,98 |
| 226,1 | 14,82 |
| 247,5 | 15,54 |
| 269,0 | 16,16 |
| 290,4 | 16,69 |
| 311,9 | 17,15 |
| 333,3 | 17,55 |
| 354,8 | 17,89 |
| 376,2 | 18,19 |
| 397,7 | 18,44 |
| 419,1 | 18,66 |
По данным таблицы нужно построить график аппроксимированного ОУ. Для этого на рис 1. налаживаем ещё одну ось, для аппроксимированного ОУ. После этого, что и график 1, в том же масштабе, строим аппроксимированный график.
По совпадению графиков делаем вывод про то, насколько точно аппроксимированные параметры аппроксимированного объекта соответствуют качествам реального объекта.
Свойства ОУ, его классификация.
Объект является статическим, классификация по окончанию переходного процесса регулирующая величина приходит к установившемуся значению.
Объект является с сосредоточенными параметрами, потому что ток, имеет определённое значение.
Дробилка является простым объектом, так как описывается простым ДУ второго порядка.
Дробилка является одно-емкостным объектом.
Дробилка обладает транспортным и небольшим емкостным запаздыванием.
Значениями динамических параметров определены в результате аппроксимации следующие: К0, Т0, τ0.
Из двух принципов по регулированию и по отключению, выбирают по отключению. Основное значение по отключению «точность»; хотя и есть недостаток – запаздывание по отключению и возмущающему воздействию.
3.ВЫБОР ТИПА РЕГУЛЯТОРА И ЗАКОНА РЕГУЛИРОВАНИЯ.
Выбор типа регулятора начинают с анализа требований технологии к качеству переходных процессов в АСР.
Из трех типовых оптимальных процессов (апериодического, с 20% перерегулированием, с минимальной площадью) выбираем тот, который максимально отвечает требованиям выходных данных.
Так как перерегулирование - это самое ответственное из показателей качества, то и выбор переходного процесса в АСР нужно начинать с него. Для этого нужно:
О
 пределить
допустимое
перерегулирование
в системе:
пределить
допустимое
перерегулирование
в системе:
(3.1)
(3.2)
Подставим свои значения в формулу (3.1), а=>u в (3.2);
Уmax=70+12=82;т.к. Уmax равен 82, то теперь
можно подставить все значения в формулу (3.1)
Следовательно
можно использовать
переходной
процесс с Fmin.
Определив тип переходного процесса, переходим к определению типа регулятора.
Тип АР выбирают из соотношения τ0/Т0.
Из моего графика я определил, что τ0=33; а Т0=143=>
=>33/143=0,23. Так как при отношении τ0/Т0 от 0,2 до 1, нужно выбрать непрерывный регулятор.
Определив тип регулятора, перехожу до определения закона регулирования. Для этого определяю
динамический коэффициент регулирования:
г
де
А1 – максимально
возможное
отклонение.
К0 – коэффициент передачи ОУ.
ƒmax – максимально возможное возбуждающее действие.
Подставим свои значения в формулу (3.3)
Кд=12/(220)=0,3.
Определив Кд и зная отношение τ0/Т0 по номограмме выбора закона регулирования, которые могут обеспечить требуемое значение А, в АСР. По номограмме мне подходит все законы регулирования, выбираю П – закон регулирования.
Теперь провожу проверку на статическое отклонение по формуле;
=(К0ƒмах)/(1+КС) (3.4)
где Кс=К0Кр – коэффициент передачи системы, его находим по формуле:
Кс=в/(τ/Т0); (3.5)
где в=1,0 т.к. у меня Fmin.
Кс=1,0/0,23=4,3
Теперь у меня есть все данные для того, чтобы произвести проверку на статическое отклонение.
=220/1+4,3=7,5 (3.6)
У меня статическое отклонение превышает допустимое значение и поэтому я и выбираю ПИ закон регулирования.
Соответственно с типом переходного процесса и законом регулирования определяем:
tp=τ0Кп (3.7)
где Кп – относительный коэффициент т.к. у меня
ПI – закон регулирования и типовой переходной
процесс Fmin , то принимаю Кп=16, в соответствии с
таблицей.
Подставляю значения в формулу (3.7)
tp=3316=528;
Следовательно подходит ПИД – регулятор потому, что tр в ПИД законе регулирования получается меньше, так как мы стремимся к минимальному значению.
После окончания выбора типа регулятора необходимо определить параметры качества процесса регулирования с выбранным регулятором.
А именно:
максимальное динамическое отклонение
А1=КдК0ƒmax (3.8)
т.к. все значения есть, то подставим в формулу:
А1=0,3220=12
Последним пунктом является вычисление параметров настройки АР, для этого по таблице, методом Котельникова выбираем необходимые параметры настройки. По таблице Котельникова нашёл пересечение ПИД – регулятора и Fmin; получилась формула:
Кр = 1,4 / K0 ( τ0 / Т0 )
Подставляем значения:
Кр = 1,4 / 2 ( 33 / 143) = 0,16
Tи = 1,3 τ0
Подставляем значения:
Tи = 1,3 33 = 42,9
Tп = 0,5 τ0
Подставляем значения:
Tп = 0,5 33 = 16,5
4.ОПРЕДЕЛЕНИЕ СТОЙКОСТИ АСР.
Для определения стойкости работы проектируемой АСР при расчетах параметрах настройки АР воспользуемся ( критерием Найквиста ).
В основе критерия лежит анализ АФЧХ разомкнутой АСР. При провидении эксперимента, схему АСР разбиваю в любой точке, получаю разомкнутую систему, подаю постоянные по амплитуде и по частоте от 0 до ∞ синусоидальная комбинация, фиксирующая зависимость амплитуды и фазы выходных колебаний от частоты входных, получают АФЧХ. Данные по её положению на комплексной площади, делают вывод про стойкость системы.
Выполняем следующие действия:
а. Строим упрощённую структурную схему разработанной АСР.
Рисунок 4.1.
Где АР – передаточная функция выбранного типа регулятора (ПИД – регулятора).
б. Разорвали главную обратную связь, получили разомкнутую систему вида:
Рисунок 4.2.
С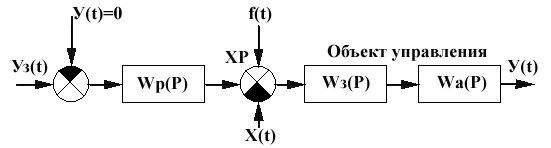
оединение
типовых динамических
звеньев которыми
является АР
и ОУ будет иметь
общую передаточную
функцию:
Wр.с(Р) = Wар(Р)W3(P)Wа(Р)
где Wар(Р) – передаточная функция выбранного АР.
W3(P) – передаточная функция запаздывающего звена.

Wа(Р) – передаточная
функция апереодического
звена.
где для ПИД – регулятора
Wа.р.(Р) = ( Kp Tи Tп PІ + Tи P + 1 ) / Tи Р (4.2)
Дальше посчитаем частотные функции элементов соединения:
Запаздывающее звено:

А
периодическое
звено:
ПИД – регулятор:
 (4.5)
(4.5)
АФЧХ соединение может быть представлено как сумма АФЧХ каждого из элементов соединения. Воспользуюсь самым простым вариантом. С точки функций получим модуль характеристики и её фазу для каждого из элементов:
Запаздывающее звено: А(ω)=1; ƒ(ω)=-ωt;
Апериодическое звено:
ƒ
(ω)=jarctg
T0ω
ПИД – регулятор:
( Kp Tи Tп PІ + Tи P + 1 ) / Tи Р = Wа.р.(Р) (4.2)
Дальше для построения АФЧХ разомкнутой системы подставлю в уравнение А(ω) и ƒ(ω) значение соответствующих параметров (К0 и Т0). Таким образом, получу выражение, для решения АФЧХ звеньев соединения. Аналогично получаю выражение для регулятора.
Дальше подставляя в выражение значение ω, рассчитаю характеристику. Результаты расчётов запишу в таблицу.
Таблица 4.1.
| АФЧХ системы с ПИД – регулятором | ||||||||
| Частота | А-звено | Зап. Звено | ПИД-регулятор | Результирующая | ||||
| W | A(w) | ф(w),гр | A(w) | ф(w),гр | A(w) | ф(w),гр | A(w) | ф(w),гр |
| 0 | 2,000 | 0,0 | 1 | 0,0 | Бескон. | -90,0 | Бескон. | -90,0 |
| 0,005 | 1,627 | -35,6 | 1 | -9,5 | 0,765 | -73,2 | 1,245 | -118,2 |
| 0,007 | 1,414 | -45,0 | 1 | -13,2 | 0,560 | -66,7 |
0,792 |
-125,0 |
| 0,01 | 1,146 | -55,0 | 1 | -18,9 | 0,411 | -57,4 | 0,471 | -131,4 |
| 0,03 | 0,454 | -76,9 | 1 | -56,7 | 0,226 | -11,5 | 0,103 | -145,1 |
| 0,032 | 0,427 | -77,7 | 1 | -60,5 | 0,224 | -8,2 | 0,096 | -146,4 |
| 0,07 | 0,199 | -84,3 | 1 | -132,4 | 0,258 | 30,7 | 0,051 | -186,0 |
| 0,09 | 0,155 | -85,6 | 1 | -170,2 | 0,296 | 41,5 | 0,046 | -214,2 |
| 0,1 | 0,140 | -86,0 | 1 | -189,1 | 0,317 | 45,7 | 0,044 | -229,4 |
| 0,11 | 0,127 | -86,4 | 1 | -208,0 | 0,339 | 49,2 | 0,043 | -245,2 |
| 0,13 | 0,107 | -86,9 | 1 | -245,8 | 0,385 | 54,8 | 0,041 | -277,9 |
| 0,15 | 0,093 | -87,3 | 1 | -283,6 | 0,432 | 59,2 | 0,040 | -311,8 |
| 0,18 | 0,078 | -87,8 | 1 | -340,4 | 0,506 | 64,0 | 0,039 |
-364,1 |
| 0,22 | 0,064 | -88,2 | 1 | -416,0 | 0,606 | 68,6 | 0,038 | -435,6 |
где А(ω)=Аа(ω)Аз(ω)Ар(ω)
ƒ(ω)=ƒа(ω)+ƒз(ω)+ƒр(ω)
По значением результирующей характеристики строим на комплексной площади годограф.
Из графика я могу сделать вывод, что как запас по фазе ∆ƒ=57˚, и по амплитуде ∆l=0,94˚, то система устойчива так как имеет большой сравнительно запас и по амплитуде и по фазе. Приложение 3-годограф.
5.РАЗРАБОТКА ФУНКЦИОНАЛЬНОЙ СХЕМЫ АСР.
В данном разделе требуется разработать функциональную схему АСР. Для этого необходимо определить тип датчика, наличие нормирующего преобразователя и др.
Функциональная схема АСР молотковой дробилки ДДМ-1 предусмотрена для размола сыпучих продуктов.
Привод осуществляется от электродвигателя, который запускается в свою очередь через магнитный пускатель (NS) и сеть (напряжением 380 В).
Для того чтобы FC «ПРОТАР» знал когда нагрузка на электродвигатель больше или меньше и подавал сигнал на магнитный пускатель (NS), чтобы ИМ закрывал заслонку больше или меньше, у меня стоит трансформатор, который следит за одним из проводов, подходящих к электродвигателю, следовательно когда нагрузка на электродвигатель больше,то по проводу идёт и ток больше, и наоборот, когда меньше тогда и ток идёт меньше.
У меня также есть и другой трансформатор к нему подсоединяется амперметр, что вдруг если выйдет из строя FC «ПРОТАР» то оператор переключась в ручной режим, может следить по нему за изменением управляющим воздействием (GI) и регулировать по показаниям прибора «амперметра» (EI), заслонкой.
А также у меня есть сигнализация (А), она срабатывает при превышении рассогласования.
Отсюда можно сделать вывод, что при нагрузке двигателя, ИМ автоматически призакрывает задвижку, до освобождения дробилки от сыпучего продукта. А также при не загруженности приоткрывает задвижку.
6.ВЫБОР ЭЛЕМЕНТНОЙ БАЗЫ.
В данном разделе мне нужно выбрать элементную базу для разработанной АСР, следовательно, выбрать конкретный АР, ИМ, пускового устройства, датчика и других элементов схем.
Выбор элементной базы.
От того как Я рассчитал значения регулирования и необходимые дополнительные функции, а также учитывая количество возможных в объекте контуров регулирования выбираем регулирующий прибор «Протар-110». Что создаёт новые возможности при создании схем автоматизации, но одновременно требует новых подходов и АСУП. Для программирования и настройки прибор имеет выносной пульт оператора. Прибор имеет средства самодиагностики и отказа, облегчающие поиск неисправностей. Специальных знаний в области математического программирования от персонала, осуществляющего наладку и обслуживание, не требуется.
Далее мне необходимо выбрать нормирующий преобразователь. Выбираю нормирующий преобразователь Е-842, предназначенный для преобразования тока трансформатора в унифицированный сигнал 0-5А. Для измерения регулируемой величины в качестве датчика используем трубу Вентури.
Ставим два трансформатора тока; один предназначен для регулирования, а второй для измерения регулируемой величины, используем амперметр. В качестве нормирующего преобразователя использую преобразователь, который преобразует сигнал в унифицированный сигнал ГСП.
Выбираю тип пускового устройства.
Регулируемым параметром дробилки является ток нагрузки электрического двигателя, который контролирует трансформатор тока ТА и электродвигатель, и регулирует подачу продукта при помощи регулируемой задвижки.
В качестве ИМ выбираю МЭО, так как этого требует данная технология.
На станции ручного управления предусмотрел кнопки для переключения на автоматическое и ручное управление.
Управление электродвигателем осуществляется через ключ F1, через контакт магнитных пускателей NS, а также контакт теплового реле КК1.
Спецификация приведена в таблице 6.1.
Таблица 6.1.
|
Наименование элемента. |
Тип, марка |
Кол-во. |
| Первичный преобразователь | Е842 | 1 |
| Трансформатор тока | ТА | 2 |
| Исполнительный механизм |
МЭО 0,63/125-0,25 |
1 |
| Ключ управления | КУ, ТП1 | 1 |
| Авторегулятор | П-110 | 1 |
| Сигнализация | ТСБ-2 | 1 |
| Клемболтовое соединение | КБС | 4 |
| Магнитный пускатель | ПБР-2 | 1 |
| Кнопки | КН | 2 |
7.РАЗРАБОТКА ПРИНЦИПИАЛЬНО – МОНТАЖНОЙ СХЕМЫ.
В данном разделе на основе монтажных схем разрабатывается ПМС системы регулирования.
Описание принципа действия принципиальной монтажной схемы АСР заключается в следующем.
Управление электро двигателем молотковой дробилки осуществляется по сети напряжением 380 (В). Также управление электродвигателем осуществляется через ключ F1, также контакт теплового реле КК1.
Для измерения и подачи тока на амперметр, я установил трансформатор ТА1. Трансформатор будит следить за нагрузкой двигателя, чтобы оператор мог при неработоспособности «ПРОТАР» переключившись сначала в ручной режим ПК2 , заслонкой, через кнопки Zб Zм через МЭО заслонкой.
Когда в дробилке будет большое количество сыпучего продукта, тогда двигатель будит больше нагружен, следовательно к трансформатору ТА2 пойдёт ток больше чем при недосыпании дробилки.
У меня также есть и второй измеряющий трансформатор ТА2. Он измеряет нагрузку на двигателе, тоисть ток идущий к двигателю. Следовательно чем ток больше, тогда и «ПРОТАР» изменяет положение заслонки, закрывая её через реле подведённое к контактам МЭО, и наоборот.
Поскольку регулирующий прибор типа «Протар - 110» имеет входной ток до 5 мА, то устанавливаем преобразователь Е842 который преобразует ток 5А в ток 5мА. Для преобразования 5мА в 0,2 ставится шунт.
Также на схеме предусмотрена сигнализация ТСБ/2, которая, срабатывает при превышении рассогласования.
8.РАЗРАБОТКА ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ АСР.
Данный раздел выполняется в зависимости от типа выбранного регулятора.
Так как для информационного обеспечения недостаточно функциональной и принципиально-монтажной схем, прибор «Протар-110» требует программирования. Для получения оптимального использования возможностей прибора необходимо самостоятельно разработать программу
Записываю разработанную программу:
Таблица 8.1
-
29-04-2015, 04:06
Разделы сайта