Разработка технологии получения электронных крупномасштабных планов сложных инженерных сооружений по результатам наземной лазерной съемки
Специальность 25.00.35 – Геоинформатика
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Общая характеристика работы
Актуальность диссертационной работы: Высокая оперативность сбора пространственных данных об объектах съемки делает наземное лазерное сканирование (НЛС) весьма перспективным методом получения информации при организации мониторинга сложных инженерных сооружений.
Однако, несмотря на все большее использование наземных лазерных сканеров при проведении геодезических работ, до сих пор не существует технологий, позволяющих определять точность данных НЛС, а соответственно и нормативов, определяющих возможность применения того или иного лазерного сканера при съемке определенного масштаба.
Наиболее сложным и трудоемким этапом работы в применении НЛС является обработка съемочных данных, которые изначально, для каждого положения лазерного сканера, представляют собой набор (облако) точек, несущих пространственную информацию о снимаемом объекте.
В полученном в результате сканирования облаке точек содержится, как правило, довольно значительное число точек, относящихся либо к шумовой составляющей, либо к избыточным точкам, что существенно усложняет процесс обработки данных наземного лазерного сканирования. Кроме того, при сканировании сложных объектов или сцен возникает необходимость проводить съемку при различном пространственном расположении лазерного локатора. Это приводит к тому, что получаются облака точек (сканы), расположенные в разных координатных плоскостях. Определенное влияние на точность сбора данных при проведении лазерной локации оказывают и условия съемки: температура, постороннее освещение, вибрации и др.
Отмеченные выше причины вызывают необходимость введения в технологию обработки данных НЛС этапа предобработки. Для получения крупномасштабных планов (1: 100 ÷ 1: 500) в число обязательных процедур этапа предобработки требуется включать калибровку данных лазерного сканера, сшивку различных сканов (сцен) одного снимаемого объекта, фильтрацию и сокращение избыточности данных лазерной локации.
Данная диссертационная работа посвящена разработке технологии проведения всего цикла работ по созданию крупномасштабных электронных планов сложных инженерных сооружений с использованием наземных лазерных сканеров.
Цель диссертационной работы: Исследование и разработка технологии получения и обработки данных наземной лазерной съемки для получения крупномасштабных планов сложных инженерных сооружений.
Основные задачи исследования:
Разработать методику проведения наземной лазерной съемки сложных инженерных сооружений для получения максимально полной и точной информации об объекте;
Разработать методику проверки и корректировки данных наземного лазерного сканирования;
Разработать методику создания электронных крупномасштабных планов из получаемого в результате сканирования облака точек;
Выполнить экспериментальное создание электронного крупномасштабного плана сложного инженерного сооружения и проанализировать результаты работы.
Научная новизна работы: Произведен анализ современных методов проведения наземной лазерной локации с целью разработки единой технологии, описывающей все этапы проведения полевых и камеральных работ по созданию крупномасштабных электронных планов с применением НЛС. Разработаны и описаны этапы работ, необходимые при создании крупномасштабных электронных планов: получение корректировочных коэффициентов для данных НЛС, полевая съемка с применением НЛС, корректировка результатов полученных измерений, сшивка откалиброванных облаков точек, фильтрация единого облака точек, выборка точек для создания нужных планов с применением специального ПО, создание и оформление по выбранным точкам электронных планов в CAD-системах.
Практическое значимость: Разработанная технология позволяет оптимизировать процесс получения крупномасштабных планов сложных инженерных сооружений. На основе результатов проведенных исследований сформулированы рекомендации по выполнению сканерной съемки сложных инженерных сооружений и обработке получаемых данных для решения практических задач.
Разработана компьютерная программа, имеющая следующие возможности:
Анализ точности лазерного сканера по результатам параллельной тахеометрической съемки.
Нахождение поправочных коэффициентов для данных, получаемых с НЛС.
Апробация работы: Результаты работы докладывались на Международном промышленном форуме “GEOFORM+” в 2005 и в 2007 годах; на научном конгрессе "ГЕО-Сибирь", направление "Геодезия, картография, маркшейдерия" в 2005г. в Новосибирске; на конференциях студентов, аспирантов и молодых ученых в МИИГАиК в 2005, 2006 и 2007гг.; на всероссийской выставке научно-технического творчества молодежи “НТТМ-2005” в Москве; на X Международной научно-практической конференции "Методы дистанционного зондирования и ГИС-технологий для оценки состояния окружающей среды, инвентаризации земель и объектов недвижимости" в Китае в 2006 году. Защищаемая методика, алгоритмы и сопутствующее программное обеспечение внедрены в практическое использование Гис-лаборатории кафедры ВТиАОИ МИИГАиК.
Основные положения, разработанные в диссертационной работе, реализованы в разработанной автором программе “L_tochnost”. Результаты экспериментальных исследований использованы для получения электронных крупномасштабных планов специального назначения кольцевой и радиальной станций “Проспект Мира” Московского метрополитена, нахождения калибровочных данных для наземных лазерного сканера Cyrax Leica 2500 и при выполнении следующих работ: Исполнительная съемка фасада здания по адресу Большая полянка, д.60/2, Исполнительная съемка цехов и трубопроводов завода Северсталь.
Публикации: По материалам диссертации опубликовано 5 работ, из них 1 – в журнале, включенном в перечень ВАК.
Структура и объем диссертации: Диссертация изложена на 106 страницах основного текста и состоит из введения, трех разделов, заключения и списка литературы. Работа иллюстрирована 20 рисунками, 11 таблицами и дополняется 3-мя приложениями. Библиографический указатель включает 83 источника, в том числе 26 иностранных.
Краткое содержание работы.
До недавнего времени получение качественной документации на сложные инженерные сооружения было невозможным из-за сложности проведения высокоточных геодезических измерений этих объектов. Благодаря появлению новых геодезических приборов - наземных лазерных сканеров (НЛС) - появилась возможность проведения таких измерений. Однако на практике, при проведении высокоточных измерений, НЛС практически не используются, и препятствует этому не только большая цена прибора. В нашей стране не существует ни официальных методик определения точности данных, получаемых с наземных лазерных сканеров, ни технологий проведения лазерной съемки, ни технологий обработки данных, получаемых в результате нее.
Принцип работы сканера аналогичен принципу работы безотражательного электронного тахеометра, но значительно превосходит его по эффективности, и основан на измерении расстояния до объекта с помощью безотражательного лазерного дальномера и задании двух углов направления лазерного луча, что в конечном итоге дает возможность вычислить пространственные координаты точки отражения. За самое короткое время объект съемки представляется в виде набора из сотен тысяч или миллионов точек. Процесс съемки с применением НЛС полностью автоматизирован, поэтому участие оператора сводится только к указанию области съемки и заданию ее параметров. Лазерный сканер позволяет проводить высококачественные измерения труднодоступных объектов: высотных зданий, башен, плотин, доменных печей, мостов.
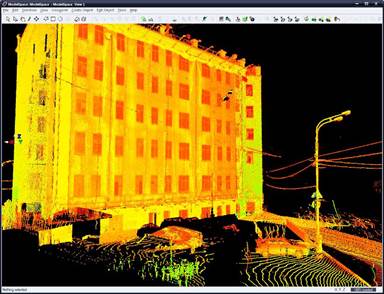
Рис.1 Облако точек.
Основной формой представления результатов наземного лазерного сканирования является массив (облако) точек (рис.1) лазерных отражений от объектов, находящихся в поле зрения сканера, со следующими характеристиками - пространственными координатами (X, Y, Z), интенсивностью и реальным цветом.
Большой объем получаемой информации не гарантирует ее высокую точность. Проверить достоверность измерений наземного лазерного сканера с помощью существующих методик исследования угловых и линейных точностей, применимых для классических геодезических приборов, не представляется возможным из-за особенностей конструкции НЛС, поскольку у сканера отсутствует зрительная труба или какое-либо другое устройство наведения. Нет у НЛС и устройства центрирования, отсутствует уровень - обязательный атрибут практически любого геодезического инструмента. На его корпусе нет метки, до которой возможно измерять высоту инструмента. Перечисленные особенности, относящиеся к категории конструктивных, не позволяют произвести проверку дальномера сканера на эталонированном базисе. Другая особенность сканера, относящаяся уже к категории технологических, не даст проконтролировать углы. НЛС сразу выдает окончательные результаты в виде трехмерных координат точек.
Для проверки точности данных, получаемых с наземного лазерного локатора, предложена методика, основанная на сравнении значений координат неких эталонных точек с точками, выдаваемыми сканером. Проблема измерения НЛС требуемой точки решается с помощью использования специальных светоотражающих мишеней. Методика основана на проведении эксперимента.
Сущность эксперимента заключается в следующем: в лабораторном помещении на разных высотах и удалении от НЛС размещаются и закрепляются специальные мишени (марки) (рис.2). Такие марки специализированы для каждого производителя, сделаны на основе маленького отражателя с известными характеристиками, и позволяют НЛС наводиться на центр марки с точностью 0.1 мм. Расстояние от сканера до мишеней должно достигать максимально возможного расстояния, при котором изготовителем сканера гарантируется точность измерений или до которого планируется проводить измерения при полевых работах. Для определения координат центров мишеней следует использовать предварительно поверенный тахеометр заведомо более высокой, нежели у НЛС, точности.
Сканирование следует выполнять таким образом, чтобы все марки вошли в один скан. Это необходимо для избежание влияния механизма поворота головки сканера на точность получения координат центров марок.
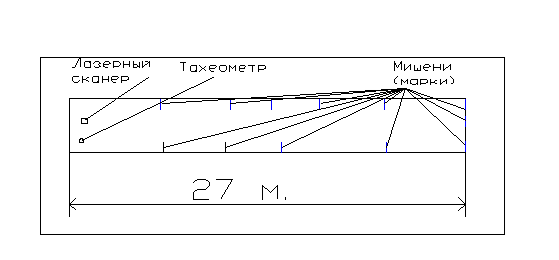
Рис.2 Схема лаборатории для проверки точности НЛС.
В работе предложена и апробирована следующая технология. Сначала полученные координаты измеренных точек выводятся из приборов в текстовые файлы через специальные программы, распространяемые совместно с оборудованием. Затем структура данных в файле с координатами, полученными с тахеометра, приводится в соответствие со структурой данных в файле, получаемых с лазерного локатора, а именно меняется направление и порядок осей координат прибора.
Увидеть ошибки измерений ЛЛ, просто сравнивая полученные файлы, нельзя, т. к. начальные координаты и направления осей измерений у тахеометра и лазерного сканера не совпадают, а соответственно не совпадают и получаемые измерения. Первоначальный вывод о точности измерения НЛС можно получить, сравнивая и анализируя расстояния между всеми парами точек, измеренных тахеометром и сканером соответственно.
Расстояние между двумя точками с координатами (x1,y1,z1) и (x2,y2,z2) определяется по формуле:
![]() (1)
(1)
При проверке по описанной методике лазерного сканера HDS-2500 с. н.336 был получен следующий график расхождения длин отрезков, соединяющих все пары центров измеренных марок:
|

Рис.3 График расхождения длин отрезков, соединяющих все пары центров марок, измеренных НЛС, в зависимости от расстояния до измеряемого объекта
Полученные результаты позволяют сделать 2 вывода:
величина ошибок измерения зависит не только от расстояния до объекта (при съемках в пределах расстояний, указанных производителем НЛС);
максимальные ошибки измерений не превышают заявленной производителем точности (6мм) для безотражательных измерений.
Для подробной информации об ошибках определения координат точек НЛС необходимо проанализировать непосредственно координаты, полученные с тахеометра, и координаты точек скана, приведенные в единую пространственную систему координат.
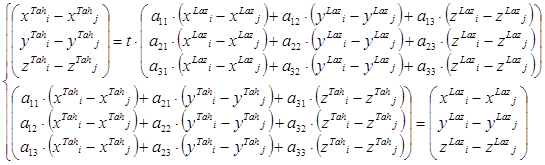
Для приведения координат мишеней, полученных в результате измерений с помощью лазерного сканера в систему координат тахеометра, использовалась наиболее общая формула перевода точек из одной системы координат в другую.
![]() , где (2)
, где (2)
![]() - координаты точки в системе координат тахеометра,
- координаты точки в системе координат тахеометра,
![]() - координаты точки в системе координат лазерного локатора,
- координаты точки в системе координат лазерного локатора,
![]() - коэффициент масштабирования системы координат тахеометра относительно системы координат лазерного локатора,
- коэффициент масштабирования системы координат тахеометра относительно системы координат лазерного локатора,
![]() - матрица перехода от одной системы координат к другой,
- матрица перехода от одной системы координат к другой,
![]() - постоянная, отражающая сдвиг начала координат первой системы координат относительно второй.
- постоянная, отражающая сдвиг начала координат первой системы координат относительно второй.
Как видно из вышеприведенной формулы, для правильного перехода из системы координат тахеометра в систему координат сканера и наоборот необходимо знать 3 параметра. Нахождение этих коэффициентов делится на несколько этапов:
Рассматривая разность координат двух точек в обеих системах координат находится коэффициент масштабирования системы координат тахеометра относительно системы координат НЛС по каждой паре марок (t):
 (3)
(3)
После нахождения коэффициентов по имеющимся данным, они усредняются:
 (4)
(4)
Полученное в результате эксперимента значение масштаба равно 0,9997429, что позволяет говорить об очень низком влиянии этого параметра при дальнейших расчетах.
Нахождение матрицы перехода T.
Для нахождения матрицы перехода нужно рассмотреть систему двух уравнений:
![]() (5)
(5)
![]()
Второе уравнение получается из предположения ортонормированности матрицы перехода T (т. к. системы координат, как тахеометра, так и лазерного локатора, прямоугольны).
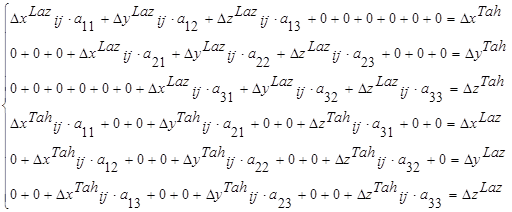
Расписывая эти две формулы, получаем систему уравнений с 9-ю неизвестными – матрицей перехода от 1-й системы координат ко 2-й:
 (6)
(6)
Складывая по 3 уравнения, получаем следующую систему уравнений:
 (7)
(7)
Получив такие системы уравнений для каждой пары точек, можно получить переопределенную систему уравнений с девятью неизвестными – и, соответственно, найти решение данной системы.
Нахождение постоянной, отражающей сдвиг начала координат первой системы координат относительно второй
Для нахождения последней из неизвестных нужно вычесть из координат точек целей, полученных тахеометром, координаты, полученные ЛЛ, после поворота их по вычисленной матрице перехода.
![]() (8)
(8)
Эту операцию следует провести для всех точек и найти среднее значение всех полученных результатов.
 (9)
(9)
После нахождения всех неизвестных параметров становится возможным привести измерения лазерного сканера в систему координат тахеометра, найти и проанализировать отклонения в измерениях координат марок (рис.4).
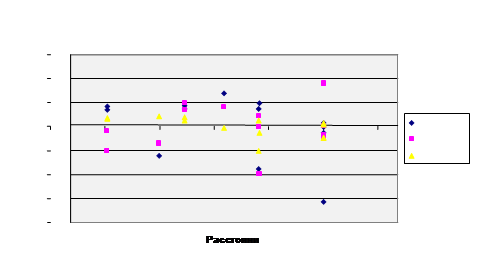
Рис.4. График ошибок измерения координат НЛС, в зависимости от расстояния до марок.
Как видно из полученных отклонений, обнаруживаются некоторые постоянные ошибки измерений НЛС. Для их исправления необходимо найти корректирующие коэффициенты. Для нахождения корректирующих данных необходимо сравнить координаты марок, измеренные сканером, и координаты марок, измеренные тахеометром, приведенные в систему координат НЛС.
Из анализа принципа действия сканеров видно, что метрические характеристики изображений, получаемых с помощью НЛС, зависят от погрешностей измерения углов и расстояний. Углы измеряются одним инструментальным способом, поэтому координаты по осям X и Z, которые получаются угломером, будем считать связанными. Координаты по оси Y не зависят от координат по оси X и Z, т. к. они получаются путем измерения расстояния до точки лазерным дальномером.
Установлено, что для качественных коэффициентов преобразования для осей X и Z достаточно полинома 2-го порядка (9,10).
∆Xi = Xi’-Xi~ = a0 + a11X + a12 Z + a21X2 + a22XZ + a23 Z2 (10)
∆Zi = Zi’-Zi~ = b0 + b11Z + b12 X + b21Z2 + b22XZ + b23 X2 (11)
Для калибровки дальномерных измерений по оси Y необходим полином более высокой, 3-ей степени. Для его нахождения достаточно 4-х координат.
∆Yi = Yi’-Yi~ = c0 + c1Y + c2Y2 +c3Y3 (12)
При решении систем уравнений получаются коэффициенты, позволяющие вводить поправку в координаты точек, получаемые непосредственно с НЛС. Сравнение откорректированных значений координат с исходными в проводимом эксперименте показало разницу до 2 мм, что позволяет рекомендовать применение данного математического механизма на практике при необходимости высокоточных измерений.
Для автоматизации анализа использовалась созданная программа ”L_tochnost” (рис.5). В ней определяются параметры связи двух пространственных систем координат - сканера и тахеометра - по файлам, содержащим измерения координат марок. Программа определяет уклонения координат сканера от рассчитанных по найденным параметрам, считает корректировочные коэффициенты для данных НЛС и пересчитывает исходные данные.
При вводе данных в программу, помимо файлов с координатами мишеней, необходимо указывать следующие параметры:
Разделитель точек (Point Separator) – символ, разделяющий координаты точек;
Десятичный разделитель (Decimal Separator) – символ, разделяющий целую и дробную часть;
Так же в программе есть дополнительные настройки, созданные для облегчения восприятия получаемой информации:
Единицы измерений – в каких единицах будет показываться получаемое расстояние между точками;
Ошибка – в каких единицах будет показывать разность расстояний.
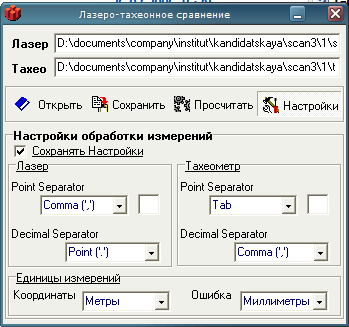
Рис.5 Окно программы ” L_tochnost”
Вышеописанная технология определения ошибок и корректировки измерений позволяет узнавать истинную точность измерений каждого отдельно взятого НЛС и определяет возможность использования того или иного сканера для получения данных для создания планов требуемого масштаба. Период времени между требуемыми проверками НЛС зависит от многих факторов (интенсивности использования НЛС, видов транспортировки, ее дальности и т.п.).
После нахождения корректирующих коэффициентов можно приступать непосредственно к съемке объекта. До начала съемки необходимо продумать такое расположение точек стояния лазерного сканера, чтобы соседние сканы перекрывались на площади не менее нескольких метров, и расположить в местах перекрытия специальные марки, которые позволят сшить сканы с максимальной точностью. Если результаты работы необходимо представить в единой геодезической системе координат, то желательно определить геодезические координаты этих марок с помощью GPS или других приборов.
Основные условия размещения марок:
• количество марок для каждой пары соседних сканов должно быть не менее трёх;
• марки не должны лежать в одной плоскости;
Также существует особенность установки лазерного локатора, связанная с его устройством.Т. к. дальномерный узел
29-04-2015, 01:02