С целью обеспечения наиболее высокой точности сканирования необходимо выполнить прогрев лазерного сканера в течение времени, установленного производителем, который позволит вывести сканер на максимально стабильный режим работы, и ввести параметры атмосферы (температуру и давление).
Процесс сканирования никаких сложностей не представляет и зависит только от используемого программного обеспечения. Но в любом случае на экране портативного компьютера нужно выделить тем или иным способом область сканирования на предварительно получаемом с помощью фото - или видеокамеры, входящей в состав НЛС, изображении, указать параметры сканирования и запустить процесс съемки.
Плотность точек на поверхности снимаемого объекта определяется следующими параметрами сканирования: задаваемым количеством измеряемых точек и расстоянием до объекта.
В результате съемки лазерным сканером получается несколько облаков точек. Для того чтобы измерить сложный инженерный объект полностью, его нужно отсканировать со всех сторон. После уравнивания (объединения) всех облаков точек в единое геометрическое пространство получается единое описание объекта съемки.
Регистрация (или сшивка) представляет собой уравнивание данных сканирования с разных станций, в единую систему координат. Существует несколько методов сшивки:
• сшивка по специальным плоским маркам-отражателям (расклеиваются на объекте и сканируются отдельно во время полевого этапа);
• сшивка по маркам-сферам (аналогично плоским маркам);
• сшивка по характерным точкам (не требует на полевом этапе использования марок вообще);
• автоматическая подгонка (программный способ сшивки, когда итерационный алгоритм смещает один скан относительно другого и находит оптимальное положение по минимальному расстоянию между точками этих сканов);
• геопривязка (позволяет привязать каждый скан или все измерения в заданную систему координат).
Для построения крупномасштабных планов оптимальным является первый способ. Хотя, в отличие от сшивки по характерным точкам, он требует дополнительной работы в поле (развешивания и последующего собирания марок), сшивка по специальным плоским маркам-отражателям дает большую точность сшивки, а также уменьшает время камеральных работ. Сшивка методом автоматической подгонки или по характерным точкам мало подходят для высокоточных измерений из-за влияния вероятностного расположения исходных точек сканирования, не позволяющая точно проконтролировать результаты сшивки, но это единственные методы сшивки, которым можно воспользоваться в случаях съемки объектов, размещение светоотражающих марок на которых не представляется возможным или связано с большими трудностями. Например, при съемке воздушного газопровода, свода крыши и т.д.
Для оптимизации количества точек в облаке следует провести фильтрацию облаков точек. Наиболее часто используются 2 метода фильтрации:
• Фильтрация вылетевших точек. Метод основан на нахождении одиноких или групп точек, находящихся на большом расстоянии от оставшегося облака точек. Выполняется в автоматическом режиме. Для запуска процедуры необходимо указать максимальное количество точек в группе, которая может быть признана вылетевшей, а также минимальное расстояния от вылетевшей группы до ближайшей точки оставшегося облака точек.
• Прореживание облака точек. Метод основан на нахождении точек, находящихся на расстоянии меньше определенного от соседних точек. Выполняется в автоматическом режиме. Для выполнения этой задачи необходимо указать минимальное расстояние между соседними точками (Рис.6).
![]()

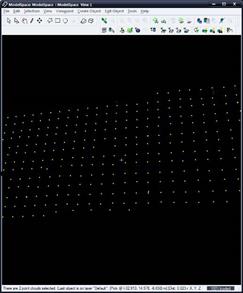
Рис.6. Фильтрация облака точек.
Перед передачей в CAD-программы сшитые откалиброванные облака точек необходимо обработать. Эти работы можно производить в программном обеспечении Cyclone, которое позволяет оперативно обрабатывать сотни миллионов точек, благодаря системе управления Уровнем Детализации (Level of Detail) отображаемой графической информации.
Существует программный инструментарий, позволяющий выделить слой точек, лежащих в определенном сечении облака точек и на заданном расстоянии от него. По результатам отфильтрованного облака точек, лежащего в таком слое, можно получить векторные изображения объектов, спроецировав оставшиеся точки в плоскость сечения и соединив соседние точки отрезками прямых.
Полученное векторное изображение объектов дорабатывается до получения планов с отображением конструкций, расстановкой размеров и нанесением иной технической информации в условных обозначениях, принятых в технической инвентаризации в CAD-программах (рис.7).
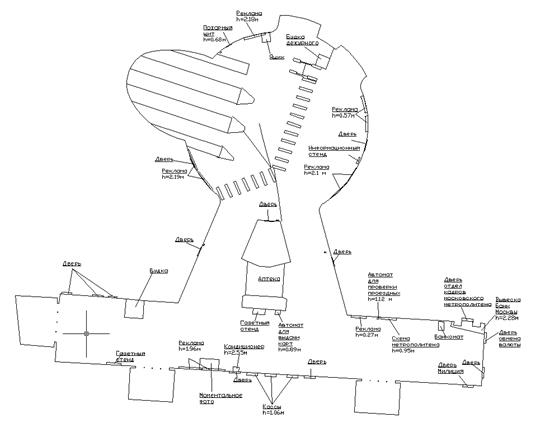
Рис.7 План специального назначения вестибюля радиальной станции “Проспект Мира”, построенный по измерениям НЛС.
Выводы и основные результаты
Предложена полная технология проведения работ по получению высокоточных планов сложных инженерных сооружений с применением НЛС. Практическое применение разработанной технологии лабораторией ГИС-технологий кафедры ВТиАОИ МИИГАиК, продемонстрировало ее высокую эффективность. В процессе работы разработаны и исследованы следующие методики и технологии:
· методика исследования точности НЛС;
· методика калибровки данных НЛС, основанная на получении корректировочных полиномов для координат точек, измеренных лазерным сканером. На основе предложенной методики выполняется корректировка данных при полевых высокоточных работах;
· методика проведения высокоточной съемки сложных инженерных сооружений с применением наземного лазерного сканера;
· технология получения высокоточных крупномасштабных планов специального назначения по данным наземной лазерной локации.
Разработана программа, позволяющая автоматизировать процесс определения метрических характеристик данных, получаемых наземными лазерными сканерами и их корректировки.
Публикации по теме диссертации
1. Журкин И.Г., Волкович Е.В., Жигалов К.Ю. Обновление картографического материала с помощью данных, полученных методом лазерной локации // Журнал геодезия и картография – Москва, 2007, №5 – с.35-37.
2. Журкин И.Г., Волкович Е.В., Жигалов К.Ю. Технология обработки данных лазерной локации для получения крупномасштабных планов сложных инженерных сооружений // Материалы международного промышленного форума GEOFORM+ Москва, 2007 – с. 20.
3. Журкин И.Г., Волкович Е.В. Факторы, влияющие на точность измерений лазерного локатора // Материалы X международной научно-практической конференции "Методы дистанционного зондирования и ГИС-технологий для оценки состояния окружающей среды, инвентаризации земель и объектов недвижимости – Китай, 2006 – с.21-26.
4. Журкин И.Г., доцент Кавешников М.Б., аспирант Волкович Е.В. Исследование и разработка методов лазерного сканирования и ГИС-технологий для координатной привязки объектов съемки городских и урбанизированных территорий // Материалы научно-технической конференции профессорско-преподавательского состава "МИИГАиК – 227" - Москва, 2006 – с.27.
5. Журкин И.Г., Жигалов К.Ю., Волкович Е.В. Применение лазерных технологий для создания 3d-модели архитектурной композиции "Золотые комнаты МИИГАиК // Материалы всероссийская выставка научно-технического творчества молодежи – Москва, 2005 – с.34.
29-04-2015, 01:02