Традиц.мметод
D (H) мм
смоделированные
С целью проверки повышения точности определения деформаций при объединении циклов, автором составлены две таблицы № 7 и 8, аналогичные предыдущим таблицам № 5 и 6, соответственно таблица № 7 содержит данные, вычисленные программой, а таблица № 8 - «традиционным методом» в седьмом цикле.
Табл. 7
| 1 | 2 | 3 | 4 | 5 |
| № марки | Имя марки | D(H) ммпрограмма |
D (H) мм смоделированные |
Разности столбцов 3-4 |
| 1 | m9 | - 12.8 | - 12.0 | -0. 8 |
| 2 | m11 | - 24.6 | - 24.0 | -0.6 |
| 3 | m15 | - 10.9 | - 12.0 | +1.1 |
| 4 | m16 | - 11.9 | - 12.0 | +0.1 |
| 5 | Р3 | - 12.1 | - 12.0 | - 0.1 |
| 6 | Р12 | - 6.2 | - 6.0 | - 0.2 |
Табл. 8
| 1 | 2 | 3 | 4 | 5 |
| № марки | Имя марки | D(H) ммТрадиц.мметод |
D(H) мм смоделированные |
Разности столбцов 3-4 |
| 1 | m9 | - 1 9.1 | - 12.0 | -7.1 |
| 2 | m11 | - 33.3 | - 24.0 | -9.3 |
| 3 | m15 | - 16.8 | - 12.0 | - 4.8 |
| 4 | m16 | - 18.9 | - 12.0 | -6.9 |
| 5 | Р3 | -21.0 | - 12.0 | -9.0 |
| 6 | Р12 | -9.0 | - 6.0 | -3.0 |
Анализ данных таблиц № 7 и № 8 приводит к тому же заключению, что при объединении циклов с использованием программы величины определяемых деформаций ближе к тем, которые вводились при моделировании (в основном, отличаются до одного миллиметра), а используя «традиционный метод» разность между этими данными становится по величине больше, что говорит о низкой точности метода.
Четвертая глава «Анализ плановых деформаций по GPS – измерениям» .
Цель этой главы заключается в том, что определяют плановые деформации, а программное обеспечение SimGPS (для моделирования) ТЕRSPACE позволяет на выбранном эллипсоиде получить значения координат опорных точек и в последующем перейти к анализу деформаций. На основе выработанного алгоритма автором был составлен блок программы, по которой предусматривается обработка результатов GPS – измерений по параметрическому способу без вычисления правого верхнего элемента матрицы Q (третья глава данной диссертации).
Рис. 4
Последовательность работы программы следующая:
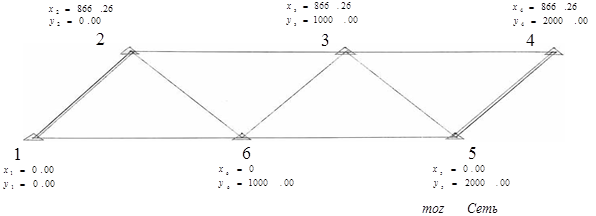
1.На основе данных из сети (рисунок №5), по программе SimGPS, задаются условные координаты плановых точек x, y, Н для заранее принятого числа пунктов в проекции Гаусса - Крюгера.
2. Вводятся связи между пунктами, которые образуют сеть.
3. Затем выполняется уравнивание плановой сети по программе «Ajust» с контролем грубых ошибок, основанном на рекуррентном алгоритме.
4. С помощью программы ТЕRSPACE переходят к преобразованию по цепочке: x, y, Н => B, L, H => X, Y, Z.
5. По координатам X, Y, Z с учетом связей между пунктами вычисляются базисные векторы ∆X, ∆Y , ∆Z.
6. Для каждой базисной линии вводятся ковариационные матрицы, при этом средняя квадратическая ошибка СКО(x)=CКО(y)=0.004, а СКО(z)= 0.007. Вводятся все коэффициенты корреляции, которые нами принимаются равными: r ( x/y) = 0.47, r ( x/z) = 0.4 и r( y/z) =0.4.
7. По программе GPS-1 выполняется уравнивание базисных линий с контролем грубых ошибок по рекуррентному алгоритму, при этом один из пунктов выбирают безошибочным (пункт 1). В результате получаются уравненные координаты X, Y, Z и их ковариационная матрица К(x, y, z).
8. По программе SPАCETER по цепочке выполняется преобразование: X, Y, Z => B, L, H => x, y, z.
Вычисляются плановые координаты в проекции Гаусса - Крюгера и вычисляется ковариационная матрица к(x, y, z).
При апробации составленной программы для анализа плановых деформаций обработаны 4 цикла с условными координатами.
Обработка геодезических данных первого цикла проходила по ранее указанной последовательности работы программы. В конце вычислений программа фиксирует имена файлов, где хранится на диске вся информация о результатах обработки геодезических данных по первому циклу. Полученная информация первого цикла следующая:
POINT 1 x = 6180000.000, m(x) = 0.000 ; y = 7400000.000, m(y) = 0.000
POINT 2 x = 6180866.261, m(x) = 0.002 ; y = 7399999.998, m(y) = 0.001
POINT 3 x = 6180866.257, m(x) = 0.002 ; y = 7400999.999, m(y) = 0.001
POINT 4 x = 6180866.258, m(x) = 0.003 ; y = 7401999.999, m(y) = 0.002
POINT 5 x = 6180000.000, m(x) = 0.003 ; y = 7401999.998, m(y) = 0.002
POINT 6 x = 6179999.996 , m(x) = 0.002 ; y = 7400999.997, m(y) = 0.001.
Во втором цикле в программу вводится общее имя файла, после чего указывается номер цикла (S = 2). Как только программа признает S>1,то она спрашивает, изменились ли координаты предыдущего цикла, с целью выявления возможных деформаций относительно предыдущего цикла. В данном случае были смоделированы деформации для точек 3 и 5, равные соответственно: - 0.015, - 0.010; - 0.017, - 0.012.
Далее, в программу вводятся деформации для выбранных точек, после чего вводятся те же ковариационные матрицы и корреляционные коэффициенты, что и в I цикле. Выполняется уравнивание рекуррентным способом для контроля грубых ошибок. Затем выполняется уравнивание параметрическим способом. Деформации получают на плоскости на эллипсоиде (WGS-84) в проекции Гаусса – Крюгера. Программа дает имена всех файлов, где хранится информация о втором цикле. Следующим пунктом программы выполняется анализ обнаруженных деформаций:
1. POINT3 Dx = -0.0154 Mx = 0.003; Dy = -0.0099 My = 0.002
2. POINT 5 Dx = -0.0162 Mx = 0.002 ;Dy = -0.0117 My = 0.002.
Обнаруженные программой деформации по величине близкие к модели.
Координаты, полученные в результате обработки данных второго цикла, отличаются от первого в тех точках, которые подвергались деформациям (в точках 3 и 5):
POINT 3 x = 6180866.245, m(x) = 0.003 ; y = 7400999.990, m(y) = 0.002
POINT 5 x = 6179999.986, m(x) = 0.004 ; y = 7401999.988, m(y) = 0.003.
При обработке данных третьего цикла, задача ставится так, чтобы те точки, которые подвергались деформациям во втором цикле, также должны деформироваться. Таким образом, проверим, выполняется ли объединение циклов с целью повышения точности определения плановых деформаций, что является одним из преимуществ данного алгоритма.
Для точек (3 и 5) смоделированы деформации равные:
0.0117, -0.0137; -0.0099, -0.0099.
В результате после уравнивания получены следующие координаты:
POINT 3 x = 6180866.233, m(x) = 0.003; y = 7400999.975, m(y) = 0.002
POINT 5 x = 6179999.975, m(x) = 0.004; y = 7401999.975, m(y) = 0.003.
Следует отметить, что координаты неподвижных точек не отличаются от предыдущих циклов.
Деформации реперов в третьем цикле относительно второго цикла:
POINT 3 Dx = - 0.0116 Mx = 0.002; Dy = - 0.0139 My = 0.001
POINT 5 Dx = - 0.0097 Mx = 0.002; Dy = - 0.0099 My = 0.002.
Проверку объединения циклов можно сделать с помощью информации о векторе суммарных деформаций, так как он представляет деформации относительно и первого цикла, и второго цикла.
POINT 3 CYKLE 1- 2 Dx =- 0.014, Dy = -0.011; CYKLE 2- 3 Dx =- 0.012, Dy =- 0.014
ВЕКТОР СУММАРНЫХ ДЕФОРМАЦИЙ:Dx =- 0.026, Dy =-0.025
POINT 5 CYKLE 1- 2 Dx =- 0.017, Dy =- 0.011; CYKLE 2- 3 Dx =-0.010, Dy =-0.010
ВЕКТОР СУММАРНЫХ ДЕФОРМАЦИЙ: Dx = -.028, Dy = -.021
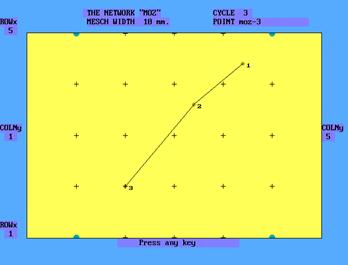
На рисунке № 5 показаны не только деформации, которым подвергается точка в текущем цикле, но и деформации предыдущего цикла.
Рис 5
Достоверность работоспособности программы для анализа плановых деформаций по GPS - измерениям.
С целью проверки работоспособности составленной программы, в четвертой главе выполнен детальный анализ полученных результатов. Обработаны четыре цикла тех же данных проекта, но «традиционным методом». Здесь под «традиционным методом» понимается метод, когда деформации определенных точек определяют по формуле:
![]() ;
; ![]() , (9)
, (9)
где ![]() – горизонтальное перемещение ( определяемая деформация),
– горизонтальное перемещение ( определяемая деформация),
![]() и
и ![]() – координаты второго и первого циклов.
– координаты второго и первого циклов.
Средние квадратические ошибки определения этих координат находят следующим образом: ![]() и
и ![]() , (10)
, (10)
где ![]() – средняя квадратическая ошибка определения деформации;
– средняя квадратическая ошибка определения деформации;
![]() ;
; ![]() – СКО определения деформаций текущего и предыдущего циклов.
– СКО определения деформаций текущего и предыдущего циклов.
Тогда: ![]() и
и ![]() . (11)
. (11)
Результаты обработки данных «традиционным методом» ІІ цикла:
Табл. 9
| № | Имя марки | Х у ΙΙ цикла |
СКО х,у(м) |
Х у Ι цикла |
СКО х,у(м) |
D х,у(м) | СКО (D)(м) |
| 1 | moz-1 | 6180000.000 7400000.000 |
0.000 0.000 |
6180000.000 7400000.000 |
0.000 0.000 |
0.000 0.000 |
0.000 0.000 |
| 2 | moz-2 | 6180866.265 7400000.003 |
0.003 0.002 |
6180866.261 7399999.998 |
0.002 0.001 |
0.004 0.005 |
0.004 0.002 |
| 3 | moz-3 | 6180866.248 7400999.987 |
0.003 0.002 |
6180866.257 7400999.999 |
0.002 0.001 |
-0.009 -0.012 |
0.004 0.002 |
| 4 | moz-4 | 6180866.260 7401999.997 |
0.004 0.003 |
6180866.258 7401999.999 |
0.003 0.002 |
0.002 -0.002 |
0.005 0.004 |
| 5 | moz-5 | 6179999.981 7401999.982 |
0.004 0.003 |
6180000.000 7401999.998 |
0.003 0.002 |
-0.019 -0.016 |
0.005 0.004 |
| 6 | moz-6 | 6180000.003 7401000.002 |
0.003 0.002 |
6179999.996 7400999.997 |
0.002 0.001 |
0.007 0.005 |
0.004 0.002 |
Таблица № 9 в столбцах 3 и 4 содержит уравненные координаты реперов и СКО их определения во втором цикле. Аналогичная информация первого цикла содержится в столбцах 5 и 6. Последние два столбца заполнены деформациями второго цикла и СКО определения этих деформаций.
Далее, составлены несколько таблиц для сравнения вычисленных разными методами деформаций с теми величинами, которые вводились при их моделировании. Проанализируем результаты обработки данных второго цикла:
Табл. 11
| 1 | 2 | 3 | 4 | 5 |
№ марки |
Имя марки | D(х,у)(мм) программа |
D(х,у) (мм) смоделированные |
Разности столбцов 3-4 |
| 1 | moz-3 | Х = -0.0154 У =- 0.0099 |
Х = -0.015 У = -0.0100 |
Х = -0.0004 У = 0.0001 |
| 2 | moz-5 | Х = -0.0162 У = -0.0117 |
Х = -0.0170 У = - 0.0120 |
Х = 0.0008 У = 0.0003 |
В этой таблице в столбце 3 отражены деформации, полученные при использовании программы. В четвертом столбце величины деформаций, которые вводились для деформирования точек, имена которых содержатся в столбце 2. Последний столбец заполнен разностью между смоделированными и вычисленными программой деформациями.
В таблице № 12 отражена информация аналогичная той, которая содержится в таблице № 11, но обработанная «традиционным методом».
Табл. 12
| 1 | 2 | 3 | 4 | 5 |
№ марки |
Имя марки |
D(х,у) мм) Трад. метод |
D(х,у) (мм) Смоделирован-ные |
Разности столбцов 3-4 |
| 1 | moz-3 | Х = -0.009 У =- 0.012 |
Х = -0.015 У = -0.010 |
Х = +0.006 У = -0.002 |
| 2 | moz-5 | Х = -0.019 У = -0.016 |
Х = -0.017 У = - 0.012 |
Х = -0.002 У = -0.004 |
Анализ этих двух таблиц показывает, что вычисленные деформации с использованием составленной программы ближе по величине к смоделированным. При обработке тех же данных «традиционным методом» разность между смоделированными и вычисленными деформациями значительно отличается от полученных по программе.
Таким образом, анализ данных по всем циклам даёт возможность с учётом их объединения получить желаемые результаты, учитывая все реально существующие деформации на данном объекте.
Заключение
1. До сих пор применяемый «традиционный метод» как вычисление разности между предыдущим и текущим циклами менее точный, чем вычисления с использованием алгоритма последовательного объединения циклов.
2. С целью экономии памяти компьютера удалось разделить процесс контроля грубых ошибок, учитывая только необходимые измерения, а для избыточных измерений вычисляются только их свободные члены уравнений поправок, и выполняется контроль грубых ошибок. При этом отпадает необходимость вычислять всю матрицу (5).
3.Объединение циклов выполняется параметрическим способом, при этом порядок матрицы коэффициентов нормальных уравнений определяется только числом пунктов, тогда как применение формулы (5) требует удвоенное число.
4.Экспериментальные исследования, выполненные в данной диссертации, направлены на применение современных геодезических методов для анализа высотных и плановых деформаций инженерных сооружений и земной поверхности.
5.Эти программы особо актуальны для республики Мозамбик, так как из-за периодических наводнений необходимо контролировать состояние всех сооружений, находящихся в зоне наводнений.
ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИИ
1. Ассане Антонио Алфредо. Анализ плановых деформаций по GPS – измерениям. Деп. в ОНИПР ЦНИИГАиК, 14.11.2006, № 886.
2. Ассане Антонио Алфредо. Методы определения деформации инженерных сооружений. Деп. в ОНИПР ЦНИИГАиК, 14.11.2006,№ 887
3. Ассане Антонио Алфредо, Ю.И. Маркузе, Е.П. Власенко. Анализ плановых деформаций инженерных сооружений и земной поверхности. Геодезия и картография, № 3 март 2007, с. 28-32.
29-04-2015, 00:34