Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
бункерные загрузочные устройства. принцип действия, производительность.
Контрольная работа по дисциплине
«Автоматизация производственных процессов»
Студент:
Группа
Преподаватель:
2010
СОДЕРЖАНИЕ
Автоматизация загрузки заготовки…………………………………………..3
Бункерные загрузочные приспособления……………………………….…..6
Список литературы…………………………………………………………..12
БУНКЕРНЫЕ ЗАГРУЗОЧНЫЕ УСТРОЙСТВА
Автоматизация загрузки заготовок
Автоматизация загрузки металлорежущих станков, контрольных, сборочных и специальных технологических автоматов занимает особое место в общем комплексе задач по автоматизации производственных процессов и является одной из наиболее сложных.
Автоматические загрузочные приспособления превращают полуавтоматы в автоматы, позволяют пересмотреть режимы работы станков и других машин с целью их интенсификации, создают условия для рациональной компоновки автоматических поточных линий, повышают культуру производства и улучшают охрану труда работающих. В массовом и крупносерийном производствах создают специальные загрузочные и разгрузочные приспособления в соответствии с формой, видом, и размерами заготовки. В серийном и мелкосерийном производствах иногда приходится в течении одной смены обрабатывать всевозможные детали из разных заготовок. Поэтому применение различных загрузочно-разгрузочных приспособлений, соответствующих каждой из заготовок потребовало бы длительного времени на установку и наладку таких устройств. В серийном производстве следует использовать универсально-наладочные устройства, позволяющие быстро их переналадить под каждую из разных по форме и размерам заготовок. Таким образом, загрузочно-разгрузочные устройства рекомендуют как в массовом и крупносерийном, так и в серийном и мелкосерийном производствах.
Анализ вспомогательного времени показывает, что на универсальных станках затраты времени на загрузку и разгрузку заготовок являются самыми значительными и составляют от 20 до 70% всего вспомогательного времени. Автоматизация загрузки позволяет превратить простое оборудование в автоматическое и достигнуть сокращения вспомогательного времени, затрачиваемого на установку и съем изделий.
Задачи механизации и автоматизации загрузки различных заготовок – одни из наиболее сложных в общем комплексе работ по автоматизации технологических процессов. Сложность заключается в большом разнообразии технологических процессов обработки и сборки, форм и размеров заготовок.
Внедрение в производство твердосплавных режущих и измерительных инструментов, пуансонов и матриц, алмазных режущих инструментов привело к созданию быстроходных станков, прессов и других машин. На таких машинах основное (машинное) время обработки деталей уменьшается в несколько раз, однако это не приводит к значительному повышению производительности труда, если не уменьшается вспомогательное время.
Сокращение вспомогательного времени за счет ускорения загрузки и разгрузки заготовок может быть достигнуто путем внедрения автоматических быстродействующих загрузочных устройств. Кроме того, автоматизация загрузки и разгрузки освобождает рабочего от выполнения однообразных монотонных действий, а следовательно, облегчает и улучшает условия его труда, значительно повышает производительность как за счет ускорения движений при загрузке и разгрузке, производящихся специальными устройствами, так и за счет представляющейся возможности обслуживания рабочим нескольких станков.
Особое значение имеет вопрос ориентирования деталей и загрузки при автоматизации процессов сборки, так как форма готовых деталей, подаваемых на сборку, сложнее формы заготовок, предназначенных для обработки на станках.
В автоматических загрузочных устройствах большое внимание уделяют также транспортным операциям, так как при автоматизации загрузочных операций детали следует не только ориентировать, но и подать на рабочую позицию автоматического станка или иной рабочей машины в требуемом положении, т. Е. в процессе загрузки необходимо перемещать деталь, не нарушая приданной ей ориентации (или иногда менять одно ориентированное положение на другое). При этом для перемещения изделий используются три типа сил: сила тяжести, внешняя приложенная сила и сила инерции.
В зависимости от применения той или иной силы или комбинации их различают три вида транспортирования изделий:
1) самотечное, под действием силы тяжести;
2) принудительное, под действием приложенной внешней силы;
3) вибрационное, под действием инерционных сил
Самотечное транспортирование не требует ни источника энергии, ни двигателя, ни специальных механизмов и поэтому находит большое применение. Однако применение его ограничивается тем, что перемещение изделий происходит с ускорением и часто скорости бывают настолько велики, что оказываются опасными для изделий. Кроме того, самотечный транспорт можно использовать только в случае перемещений сверху вниз.
Самотечный способ транспортирования несколько улучшается при колебаниях, перпендикулярных направлению движения. Скорость скольжения при этом можно регулировать частотой колебаний, а само движение может осуществляться при наклонах значительно меньших угла трения. Установки для такого полусамотечного движения относительно несложны и занимают по высоте меньше места.
Принудительный транспорт позволяет перемещать объекты в любом направлении равномерно, ускоренно, замедленно и т. Д.
Вибрационный транспорт является в некоторой мере промежуточным между самотечным и принудительным. Так как изделия движутся силами инерции, а не направляются сопровождающими изделие жесткими толкателями, то движение может приостановиться и ждать, пока освободится место для транспортируемых изделий, как это имеет место в самотечном транспорте. Изделия можно перемещать под очень небольшим углом вниз, горизонтально и даже под небольшим углом вверх, т. Е. так, как это позволяет принудительное транспортирование. Кроме того, на вибрационном транспорте очень удобно осуществлять ориентирование изделий сложной формы.
Несмотря на то что в русской и иностранной литературе можно встретить описания загрузочных приспособлений 60 -70-летней давности, еще до сих пор автоматизация загрузки и особенно ориентирования является далеко не изученным и весьма сложным вопросом. Однако в последние годы он выделяется в самостоятельную отрасль науки.
Бункерные загрузочные приспособления
Бункерные загрузочные устройства проектируются и изготавливаются под конкретную номенклатуру деталей. Кроме того, интенсивное перемешивание заготовок и деталей в бункере приводит к порче их внешних поверхностей. Эти недостатки бункерных загрузочных устройств явились причинами того, что они применяются реже, чем магазинные загрузочные устройства.
Загрузочные приспособления могут состоять из одних лотков, в которых изделия перемещаются самотеком непосредственно в зону обработки, как это имеет место, например, в бесцентрово – шлифовальных станках. При некотором усложнении к лотковым магазинам ЛМ (рис. 1, а) добавляют питатель П, действующий синхронно с другими исполнительными органами станка, т. Е. связанный с рабочим циклом станка. Этот питатель выбирает из выходного отверстия лотка по одной заготовке и подает ее в зону обработки.
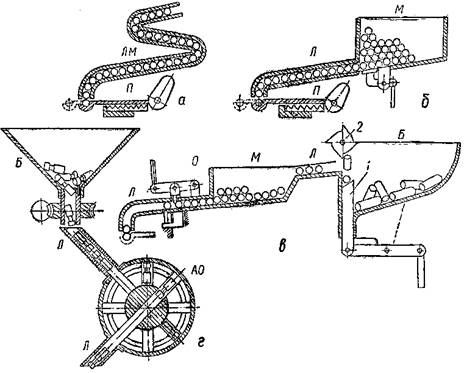
Рис. 1. Разновидности загрузочных устройств.
Для увеличения емкости лотку придают форму зигзага , спирали и т.п. В результате стремления еще больше увеличить емкость возникли так называемые ящично-магазинные загрузочные приспособления , состоящие из магазина М и лотка Л (рис.1,б). Следует иметь в виду ,что увеличение объема емкости ограничивается возникновением чрезмерного давления верхних слоев деталей на нижние ,что ведет к сводообразованию, затрудняющему выдачу изделий. Этот тип приспособлений не всегда удовлетворяет требованиям практики, так как в его емкость изделия укладываются в ориентированном положении.
В бункерные загрузочные приспособления изделия загружаются в неориентированном положении – навалом (рис.1,в). Емкость этих приспособлений принято называть бункером Б, откуда и возникло название приспособлений.
Формы бункеров весьма разнообразны. Наиболее распространены ковшеобразные и цилиндрические. Дно и стенки бункера расположены под углом к горизонтальной плоскости, благодаря чему отдельные детали под действием собственного веса и возникающих сил трения движутся в направлении к захватным органам.
В процессе этого движения детали, увлекаемые силами трения вращающегося диска, пересыпаются и одновременно перемешиваются, занимая в пространстве положение, благоприятное для захвата их захватными органами.
Захватные органы могут выполняться в виде крючков, штырей, стержней, которые применяются для захвата деталей типа гильз, колпачков, колец, шайб, полых роликов.
Бункерные загрузочные устройства проектируются и изготавливаются под конкретную номенклатуру деталей. Кроме того, интенсивное перемешивание заготовок и деталей в бункере приводит к порче их внешних поверхностей. Эти недостатки бункерных загрузочных устройств явились причинами того, что они в РТК применяются реже, чем магазинные загрузочные устройства.
Бункерные загрузочно-ориентирующие устройства (БЗОУ) выполняют значительно более сложные функции, чем магазинные. Эти устройства имеют захватывающие и ориентирующие механизмы, которые выбирают из общего навала изделия и выдают их в одном или нескольких определенных положениях на транспортное устройство, представляющее собой большей частью лоток. Таким образом, бункерные загрузочные устройства в отличие от магазинных несут функции ориентирования. В устройстве, показанном на рис. 1 в, ножевой толкатель 1 выбирает из навала и поднимает детали в ориентированном положении, а сбрасыватель 2 сталкивает с толкателя 1 лишние или неправильно ориентированные изделия.
Следует иметь в виду, что БЗОУ имеют непостоянную производительность, несколько колеблющуюся во времени. Так, например, при каждом ходе толкатель 1 может поднимать разное количество деталей. Для того чтобы компенсировать колебание производительности бункера при постоянной производительности обслуживаемого им станка, необходимо иметь накопленный запас деталей.
Детали накапливаются в магазине А1 и запас их играет роль своего рода аккумулятора: в период пониженной производительности бункера детали подаются в станок за счет расходования запаса в магазине, который пополняется в период повышенной производительности бункера. Часто роль магазина играет обычный лоток и специального ящичного магазина А1 делать не нужно.
Детали выдаются из БЗОУ с помощью отсекателя О, который работает по циклу, диктуемому станком, или с помощью питательного механизма. В некоторых, довольно редких случаях, необходимо применять как отсекатель, так и питатель (питатель на рис. 1,в показан пунктиром).
Автоматическое ориентирование деталей сложных форм полностью осуществить в бункере обычно не удается. Так, например, детали в виде валиков с несимметрично расположенной проточкой могут выходить из бункера проточкой вперед или проточкой назад, т. Е. в двух возможных положениях. В бункере только уменьшается количество возможных положений, или, как говорят, деталям придается первичное ориентирование. В таких случаях необходимо дополнительно произвести в специальных устройствах вторичное ориентирование, после которого детали движутся к рабочей зоне только в одном, определенном положении.
В приведенном на рис. 1, г устройстве имеется специальный механизм автоматической ориентации АО, окончательно ориентирующий все детали проточкой вперед.
Итак, бункерное загрузочно-ориентирующее устройство представляет собой группу механизмов, принимающих детали навалом и подающих их к рабочей зоне машины строго ориентированными в пространстве и во времени.
На практике все описанные типы загрузочных приспособлений не изживают друг друга, так как каждый из них имеет свои преимущества и недостатки. Иногда отдельные типы приспособлений комбинируются друг с другом, например, бункерный с магазинным (рис. 1, в).
Несмотря на то, что БЗОУ являются наиболее совершенными устройствами и имеют наиболее высокую степень автоматизации, они все же не могут применяться во всех случаях. Часто препятствием к их применению является громоздкость устройства, хрупкость, ажурность изделий и склонность их к слеживанию и сцеплению.
Ознакомление с различными типами загрузочных приспособлений позволяет сделать вывод, что они состоят из следующих целевых механизмов: бункеров, лотков, магазинов, отсекателей, питателей и автоматических ориентирующих устройств (для вторичного ориентирования). Ниже рассматривается подробнее каждый из этих типов целевых механизмов.
Своеобразие работы бункера заключается в том, что почти все известные рабочие механизмы загружаются сырьем или полуфабрикатами в строго определенном положении; в бункер же детали засыпаются навалом и занимают в нем произвольные положения. Цель бункера – выбрать из навала по одной детали и придать ей первичную ориентацию.
Бункер выдает детали неритмично, через различные промежутки времени. Однако в определенные отрезки времени производительность бункера можно считать примерно постоянной, т. Е. бункер имеет некоторую среднюю производительность Qср.
Для деталей сравнительно простых форм первичная ориентация в бункере является достаточной, все детали выходят из бункера в одном определенном положении и вторичного ориентирования в специальных ориентирующих устройствах не требуют.
Вынос деталей из навала может осуществляться принудительно специальными механизмами по одной или по несколько штук с одновременным приданием им первичной ориентации (табл. 1). Принудительный вынос выполняется карманами, крючками, лотками или лопастями. Применение тех или иных устройств для выноса деталей из навала определяет тип бункера.
Таблица 1
1. Способы выноса деталей из навала
Способ выноса |
Принудительно специальными механизмами |
Параметрически | |||||
| Поштучно | Партиями | Непрерывным потоком | |||||
| Карманом | Крючком | Лотком | Лопастью | Собственным весом | Силой трения | Силой инерции | |
| Тип бункера | Карманчиковый | Крючковый, штырьевой |
Секторный, ножевой дисковый |
Лопастный, щелевой, барабанный | Трубчатый | Фрикционный | Вибрационный |
Параметрически, т. Е. без механизмов, вынос и первичное ориентирование деталей в бункерах можно осуществлять, используя собственный. Вес деталей, силы трения между деталями и рабочими поверхностями бункера или с помощью сил инерции, возникающих в результате сообщения рабочим поверхностям бункера колебательного (вибрационного) движения.
Магазины накапливают и сохраняют детали в ориентированном положении.
Лотки осуществляют в основном транспортные операции по перемещению деталей между целевыми механизмами БЗОУ или к рабочим органам машин. В некоторых случаях они одновременно играют роль магазина, а иногда используются также для вторичного ориентирования.
Отсекатели и питательные устройства работают синхронно с рабочими органами машин, подавая детали к рабочим органам в определенные периоды рабочего цикла, т. Е. ориентируют детали во времени.
Устройства автоматического ориентирования осуществляют, как указывалось выше, вторичное ориентирование деталей сложных форм.
СПИСОК ЛИТЕРАТУРЫ
1. Белоусов А.П., Дащенко А.И. Основы автоматизации производства в машиностроении: Уч. пособие..- М.: Высшая школа, 1982.
2. Белоусов А.П. и др. Автоматизация процессов в машиностроении: Уч.пособие.. – М.: Высшая школа, 1973.
29-04-2015, 02:46