Рассмотрим алгоритм определения угла между I1 и Y2 , лишенный вышеуказанных недостатков. Для обоснования алгоритма построим векторную диаграмму асинхронного двигателя с короткозамкнутым ротором, отложив вдоль действительной оси Ra ток намагничивания I0 , определенный по известным реактивным параметрам асинхронного двигателя и измеренным значениям фазных токов и напряжений [4].
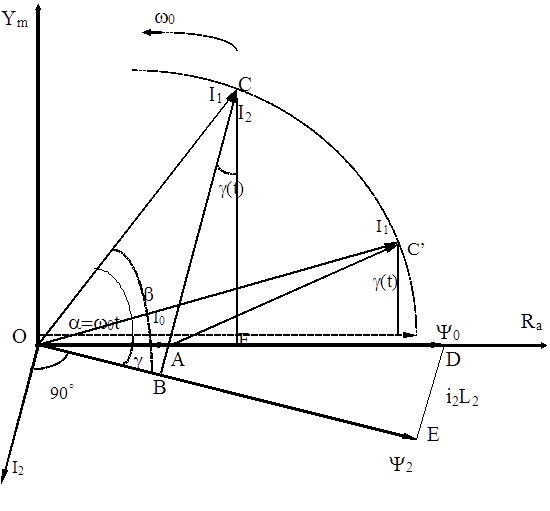
Значение углов между I1 и Y2 можно определить в реальном масштабе времени, когда вращение вектора тока статора статора I1 определяется частотой питания асинхронного двигателя и в ускоренном масштабе времени, когда вращение вектора тока I1 определяется в модели выбранным шагом временного интервала и быстродействием микропроцессорной системы. Второй вариант измерения углов более предпочтителен, так как позволяет осуществить больше измерений. По измеренным значениям фазных токов двигателя определяем величину вектора тока I1 и совмещаем его в модели с действительной осью Ra, а затем переводим (в произвольный момент времени t1 ) вектор тока I1 в неподвижную, относительно статора, систему координат, то есть начинает выполняться программа, согласно которой вектор тока I1 поворачивается против часовой стрелки со скоростью, определяемой быстродействием микропроцессорной системы и выбранным шагом временного интервала.
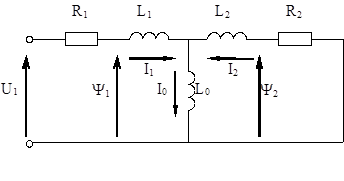
Из Т-образной схемы замещения (рис. 3) видно, что ![]() , то есть векторы тока и потокосцепления ротора взаимно перпендикулярны. В процессе поворота угол между векторами I0
и Y2
g(t) будет изменяться согласно выражения:
, то есть векторы тока и потокосцепления ротора взаимно перпендикулярны. В процессе поворота угол между векторами I0
и Y2
g(t) будет изменяться согласно выражения: 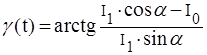 (1), где a=w0
t - текущий угол между вектором тока статора и действительной осью Ra. В момент времени t2
вектор тока статора I1
займет положение OC, при котором векторы тока ротора I2
и потокосцепления ротора Y2
взаимно перпендикулярны, то есть g(t2
)=g.
(1), где a=w0
t - текущий угол между вектором тока статора и действительной осью Ra. В момент времени t2
вектор тока статора I1
займет положение OC, при котором векторы тока ротора I2
и потокосцепления ротора Y2
взаимно перпендикулярны, то есть g(t2
)=g.
Из рис. видно, что при g(t2 )=g выполняется соотношение:
I1 ×sinb=BC=AC+AB.
Величина отрезка AB определяется из подобия треугольников OBA и OED:  .
.
Так как AC = i2 (из векторной диаграммы), то
BC = I2
+  =
=  .
.
Величина отрезка AC определяется из треугольника АFC:
![]() (2).
(2).
Таким образом, изменяющийся во времени угол g(t) будет равен углу между векторами тока намагничивания I0 и потокосцепления ротора Y2 асинхронного двигателя в момент выполнения равенства:
 . (3)
. (3)
Из векторной диаграммы (рис. ) видно, что искомый угол b между векторами тока статора I1 и потокосцепления ротора Y2 будет определяться как:
b = a(t2 ) + g(t2) = w0 ×t + g
2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ
2.1 Наименование и область применения
Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем.
Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом.
2.2 Основание для проведения разработки
Проектируемая АСУ предназначена для управления асинхронным двигателем и осуществляет регулирование и измерение его основных параметров.
Автоматизированная система управления асинхронным двигателем может применяться для замены уже установленных систем управления устаревших образцов. При этом требуются минимальные капитальные затраты, но достигается значительное улучшение работы объекта управления.
2.3 Цель и назначение разработки
Целью создания АСУ является повышение технико-экономических показателей работы асинхронного двигателя. При этом эффективность управления достигается за счет применения современных методов управления технологическими процессами, а также использования новейших технических средств автоматизации.
2.4 Требования к системе
Распределение функций АСУ должно быть выполнено с целью достижения высокой устойчивости системы к отказам ее структурных компонентов и сочетаться с централизацией функций принятия решений по управлению технологическим процессом.
В целях повышения надежности функционирования АСУ должно быть предусмотрено резервирование ее структурных компонентов.
АСУ должна быть реализована в виде структуры, состоящей из определенного количества функциональных подсистем и отражающей принципы декомпозиции АСУ как по технологическому признаку, так и в соответствии с иерархией реализуемых задач управления.
2.4.1 Требования к комплексу решаемых задач
Для реализации поставленных задач система должна обеспечивать:
пуск и останов двигателя;
изменение частоты вращения вала двигателя;
регистрацию (вывод на экран и печать) основных параметров двигателя (информация должна представляться на экране оператору в удобной для чтения форме: в виде таблиц и графиков);
экстренный останов двигателя в случае поступления аварийного сигнала от датчиков (при отклонении параметров от допустимых технологических пределов);
резервирование измерительных каналов.
2.4.2 Нижний уровень
Нижний уровень должен решать задачи сбора информации с датчиков технологических параметров, контроль исправности датчиков и линий связи, контроль параметров и сигнализация об отклонениях их за допустимые технологические пределы, а также передает их в АСУ верхнего уровня.
2.4.3 Верхний уровень
Верхний уровень АСУ выполняет функции диалогового взаимодействия с оператором, включающие в себя отображение, накопление и анализ данных по измеренным параметрам двигателя, рассчитанным значениям параметров двигателя.
2.4.4 Требования к надежности
В качестве комплексного показателя надежности (учитывающего безотказность и ремонтопригодность) согласно ГОСТ 24.701-86 должен использоваться коэффициент готовности, определяющий вероятность работоспособности системы в любой произвольно выбранный момент времени в соответствии с режимом работы объекта управления.
Коэффициент готовности для системы в целом должен составить :
для автоматического режима (с учетом надежности датчиков)
- Кг=0,995;
для автоматического режима (без учета надежности датчиков)
- Кг=0,998;
для режима ручного (дистанционного) управления
- Кг=0,998.
2.4.5 Требования к безопасности
При проектировании АСУТП должны быть пред усмотрены меры по обес печен ию безопасности при монтаже, эксплуатации, обслуживанию и ремонту технических средств в соответствии с действующими нормативными документами :
"Са нитарные нормы проектирования промышленных предприятий" СН 245- 71, утвержденные Госстроем СССР 05.02.71г.;
"Правила устрой ства электроустановок" ПУЭ-76;
"Пожа рна я автоматика зданий и сооружений" СНиП 2.04.09-8 4г. ;
"Система стандартов безопасности труда (ССБТ) . Оборудование производственное. Общие требования безопасности" ГОСТ 12.2.003 -74;
"ССБТ. Цвета сигнал ьные и знаки безопасности", ГОСТ 12.4.026- 76;
Уровень освещ енности рабочих мест персонала АСУ должен соот ветствовать характеру и условиям труда. Должны быть предусмотрены защита от слепящего дей ствия света и устранение бликов.
Для помещения микропроцессорной техники должна быть разрабо тана система автоматического пожаротушения. Все помещения, в которых размещаются средства АСУ, должны быть оборудованы автоматической пожарной сигнализацией .
Требования к безопасности электрических изделий, используемых в АСУ,
должны соответствовать
ГОСТ 12.2.007.0-
75.
Требования к безопасности средств вычислительной техники, используемой в АСУ, должны соответствовать ГОСТ 25861-83 .
Все внешние элементы тех нических средств АСУ, находящиеся под напряжением, должн ы иметь защиту от случайного прикосновения.
Все технические средства должн ы иметь защитное заз емление.
2.4.6 Требования к эргономи к е и технической эстетике
Отделка помещений микропроцессорной техники и центрального поста управления (ЦПУ) должна быть выполнена в светлых тонах.
Рабочее место технологическ ого персонала центрального поста управл ения должно соответств овать требованиям ГОСТ 22269-76 и ГОСТ 21958-76.
Конструк ция рабочих мест долж на обеспечить быстроту, простоту экономичность технического обслужив ания и ремонта в нормальн ых и аварийных условиях.
Все щиты и пульты, расположенные в ЦПУ, должны б ыть совмеще нными (с размещением сред ств управления по проектам электрооборудования и АСУТП) и разработаны головным исполнителем.
Конструкция и расположение щитов, пультов в ЦПУ должны обеспечить обоз римость и простоту обслуживания.
Форма пре дставления информации на видеокадрах должна обеспечивать нагляд ность, достоверность и одно значное понимание представляемой инф ормации. Должны быть п риняты меры для снижения з рительной нагрузки на оператора. Видеокадры должны быть разработаны с учетом психофизиологических особенностей восприятия человека.
2.4.7 Требования к эксплуатации, техническому обслуживанию, ремонту и хранению ко мпонентов системы
В з ависимости от функционального назначения технических средств, а также для рацион альной компоновки и удобства обслуживания, технические средства должны располагаться в следующих помещениях :
центральном посту управления;
помещении микропроцессорной техники.
Площад ь помещений должна соответствовать требованиям предприятий-изгото вителей по размещению и обслуживанию технических средств и санитарных норм СН2 45-71.
В помещениях должны быть обеспечены санитарно- гигиенические условия эксплуатации комплекса технических средств ( КТС ) в соответствии со СННП 2.04.05-86, СН 245-71, СН 512-78.
В помещениях микропроцессорной техники и ЦПУ должно быть предусмотрено кондицион ирование в озд уха.
При проекти ровании электроснабжения и систем искусственно го освещ ени я помещ ений для размещ ен ия технических средств необходимо выполнять требования "Правил устройств электроустановок" (ПУЭ), СНИП П-4-79 , а также треб ования гла в СНИП по электрическим устройствам.
При определении предельно допустимых концентраций агрессивных примесей в помещении, предельно д опустимой амплитуды и частоты вибрации, воздействующей на средства АСУТП, необходимо руководствов аться СН 245- 71.
Все вышеперечисленные требования, а также требования к площадям для размещения средств АСУ, прорабатываются на стадии технического проекта и выдаю тся в задании на проектирование помеще ний.
Расположение кабельных трасс должно исключать воздействие высокой температуры, масла, воды, а также быть удобным для монтажа и демонтажа.
До лжны быть обеспечены условия хранения технических средств АСУ для микроклиматического района с умеренным климатом. Срок пребывания изделия в соответствующих условиях устанавливается техническими условиями хранения изделий.
В помещениях для хранения средств вычислительной техники (СВТ) не должно быть агрессивных примесей (паров, кислот, щелочей), вызывающих коррозию.
СВТ хранят в упаковке в складских помеще ниях при температуре воздух а 5¸ 35°С и относительной влажности не более 85%. Допускается хранение в более жестких условиях, если проведена консервация СВТ в соответствии с требованиями ГОСТ 9.014-78 способом, обеспечив ающим сохранность СВТ при сред них условиях хранения в течение 9 месяце в.
Для сокращения обще го времени обслуживания комплекса технических средств должно быть организовано параллельное обслуживание устройств этого комплекса в соответствии с инструкциями по эксплуатации на эти изделия.
Состав ЗИ П должен быть определен в процессе проектирования и включен в специф икацию оборудования.
2.4.8 Требования к з ащите информации от несанкционированного доступа
Должна быть обеспечена программная и аппаратная з ащита от неквалифицированных действий польз ователя и от попыток несанкционированного доступа пользователей к внутрисистемной инф ормации.
В зависимости от статуса пользователя должны быть предусмот рены различные уровни доступа к внутрисистемной информации.
2.4.9 Требования по сохранности информации при авариях
Требования по сохранности информации в системе обеспечиваются выбо ром технических средств, содержащих аппаратные и программные средства защиты информации, а также соответствующими организационными решениями.
Для обеспечения сохранности информации при авариях в системе электропитания, а также при кратковременных скачках напряжения пи тающей сети, необходимо осуществлять питание СВТ от отд ельных трансформаторов силовой подстанции по двум независимым стабилизи рованны м вводам.
2.4.10 Требования к защите от влияния внешних воздействий
Для защиты КТС АСУ от влияния внеш них воздействий необходи мо выполнить следующ ие мероприятия:
устрой ства, расположенные возле источников радиопомех, должны быть экранированы ;
для защиты линий связ и аналоговых, цифро-импульсных, кодированных сигналов и линий межмашинной связи от навод ок, выз ванных внешним переменным или импульсным электрическим полем, необходимо поместить линию в экранирующую оплетку, заземленную в одной точке ;
при выборе уровня напряжения дискретных сигнало в следует руководствоваться РТМ 25.212-85 ;
укла дка в один жгут цепей электропитания, слаботочных цепей и цепей пе ре дачи и нформа ции не до пускается ;
в необходимых случаях след ует предусмотреть экранирование помещений, в которых будут расположены технические средства АСУ ;
напряженность внешнего магнитного поля в местах размещения СВТ не должна превышать 400 А/м ;
СВТ должны иметь отдельные контуры з ащитного заз емления, организованные в соответствии с "Правилами устройства электроустановок" и техническими условиями эксплуатации технических средств. Заземление должно быть автономным. Подклю чение к нему силового об орудования и электроприемников другого назначения не допускается ;
в помещении микропроцессорной техники д ол жна быть предусмотрена отдельная (автономная) магистраль схемного зануления . Магистраль выполнить в соответствии с "Правилами устройства электроустановок" и техническими условиями на эти средства.
При проектировании помещений, в которых размещаются технические средства АСУ, необходимо принять меры, уменьшающие механические воз действия от работы оборудования прокатного цеха. Вибрация в этих помещениях не д олжна превыш ать по частоте 25 Гц, а по амплитуде - 0,1 мм.
2.5 Требования к видам обеспечения
2.5.1 Требования к математическому обеспечению
Состав математического обеспечения системы должен обеспечивать выполнение ф ункций всех ее компонентов (систем), реализ уем ых с помощью программируемых технических средств.
Математическое обеспечение системы содержит следующие компоненты :
общесистемные алгоритмы, обеспечивающи е функционирование системы в целом ;
алгоритмы сбора и обработки информации ;
алгоритмы реализации отдельных задач ;
Для реализации однотипных з ад ач необходимо использ овать однотипные алгоритмы.
Алгоритмы должны быть работоспособны при любых значениях вх одно й и обрабатываемой информации.
2.5.2 Требования к информационному обеспечению
База данных АСУ должна быть распределена в соответствии с принци пами декомпозиции комплекса технических средств и адекватна иерархической структуре АСУ с распределенными функци ями обработки инф ормации.
И нфо рмац ионный обмен между компонентами АСУ должен обеспечивать целостность распределен ной базы д анных системы.
И нформационный о бм ен м ежду систе мам и АСУТП в з ав исимости от уровня иера рх ии и распре деления их по т ехническим средств ам д олжен ос ущес тв ляться путем :
передачи унифицированных сигналов ;
передачи межсистемных сообщений и запросов ;
использования общих информационных баз.
Для обеспечения сохранности информации при сбоях или авариях в системе электропитания технических сред ств АСУТП должны быть предусмотрены следую щи е меры :
дублирование входного потока сигналов и сообщений ;
формирование дублирую щих баз данных на магнитных носителях;
применение энергонезависимых оперативных запоминающи х устройств;
квитирование межсистемных сообщений.
Должен быть предусмотрен контро ль в ход ной информации кажд ой системы на достоверность, в т. ч. контроль достоверности информации, вводимой оператором вручную.
Должна быть предусмотрена возможность восстановления базы данных АСУ с использованием дублирующей баз ы данных и архивной информации.
2.5.3 Тр е бования к лингвистическому обеспечению
Требования к применению языков программирования, яз ыков вз аимодействия пользовате лей и технических средств системы, а также требов ания к кодированию и декодированию данных, средствам манипулиров ания данными и с пособам организации диалога определяются применяемым для ре ализации АСУТП комплексом технических средств.
Человек о-машинное взаимодей ствие при вводе-выводе инф ормации должно осуществляться в интерактивном режиме с помощью клавиатуры и дисплея д ля подсистем верхнего и среднего уровней АСУ. Для подсистем нижнего уровня АСУ ввод исходных данных может осуществляться с помощью задатчиков и сервисных устрой ств комплекса технических средств.
До лжны быть об еспечены единство и однозначность кодирования информации раз личных уровней системы.
В целях защиты информации от несанкционированного доступа должна быть предусмотрена система паролей с различными уровнями доступа для различных категорий пользователей с разной мерой ответственности.
2.5.4 Требования к программному обеспечению
Программное обеспечение АСУТП должно быть достаточным для реализ ации всех функций системы.
Требования к независимости программных средств от используемых средств вычислительной техники и операционной системы не предъявляю тся.
Базовое и тестовое программное обеспечение должны поставляться в составе комплекса тех нических средств.
Прикладное программное обеспечение подсистем нижнего уровня может быть соз дано путем конфигурирования стандартных программных модулей с использованием инструментального комплекса техническим средств. При не обходи мости должны быть разработаны допо лнительные програ ммные модули и средства.
Требов ания к необходимости согласования вновь разрабатыв аемых программных средств с фо ндом ал горитмов и программ не предъявляю тся.
2.5.5 Требования к техническому обеспечению
В качестве средств вычислительной техники должны быть применены персональные ЭВМ (ПЭВМ ) на верхнем уровне АСУ и микропроцессорный комплекс технических средств на нижнем уровне системы. Техническое обеспечение АСУТП должно быть построено по иерархическому принципу и обеспечивать выполнение функций , описанных в техническом задании данного дипломного проекта.
Комплекс технических средств АСУТП должен обеспечивать бесперебой ное функционирование системы.
Для получения первичной входной информации должны быть ис п ольз ованы датчики, измерительные и нормирующие преобразователи с унифицированными характеристиками.
Комплекс технических средств АСУТП должен отвечать следую щим критериям :
обеспечение минимального времени на обслуживание ;
наглядность и простота польз ования средствами отображения, сигнализации и дистанционного управления ;
высока я автоматизация процессов запуска, останова и сервисного обслуживания ;
удобство пользования справочными, архивными и сервисными данным и.
3. СПЕЦИАЛЬНАЯ ЧАСТЬ
3.1 Выбор технических средств
Исходя из формулировки задачи определим технические средства необходимые для реализации устройства с заданными характеристиками и свойствами.
Для контроля скорости вала двигателя будем использовать тахогенератор сопряженный с валом рабочего двигателя, сигнал от которого заведем на аналогово-цифровой преобразователь находящийся непосредственно в разрабатываемой системе. Для преобразования непрерывного сигнала в цифровую форму представления выберем микросхему 1113ПВ1.
Сигналы от АЦП будем передавать на однокристальный микроконтроллер КР1816ВЕ51 выбранный по причине его аналогичности контроллеру Intel87C51FX, соответствия команд этих контроллеров и соответствия по уровням сигналов с ЭВМ выпускаемыми Intel, а также необходимости оперирования с данными представленными в параллельном формате, а также передачи обработанной информации в последовательном формате. Для ведения статистики работы системы потребуется ЭВМ типа IBM AT286 или более поздние модели.
Для получения информации о процессах, происходящих в системе, потребуются датчики. Для коммутации датчиков с модулем микроконтроллера используем принцип опроса и передачи информации о состоянии дискретных датчиков. Сопряжение будет осуществляться по линии связи посредством кабеля ТРШ.
Для гальванической развязки цепей линии связи и цепей микроконтроллера будем использовать оптроны, которые необходимы для преобразования сигналов представленных в линии связи импульсами тока в импульсы напряжения ТТЛ-уровня.
3.2 Разработка структурной схемы
Разработку структурной схемы автоматического управления асинхронным двигателем начнем с необходимости контроля температуры корпуса двигателя, частоты вращения вала двигателя.
Кроме того для получения информации о скорости вращения вала двигателя расположим тахогенератор, вал которого жестко сопряжен с валом рабочего двигателя. Двухпроводная линия связи соединяет тахогенератор с блоком управления.
Для контроля работы двигателя и ведения статистики этой работы контроллер соединяется с ЭВМ верхнего уровня.
Таким образом структурная схема будет содержать систему датчиков, устройства сбора и промежуточной передачи информации, устройство управления работой установки и машины верхнего уровня.
3.3 Разработка функциональной схемы
Функциональную схему можно условно разбить на блоки:
блок центрального процессора;
блок ввода и преобразования аналоговых сигналов;
блок ввода-вывода дискретных сигналов;
линейные модули;
блок гальванических развязок.
3.3.1 Блок центрального процессора
Блок центрального процессора содержит однокристальный микроконтроллер КР1816ВЕ51, далее - контроллер, микросхему ППЗУ и устройства сопряжения. Для обеспечения доступа к памяти на разрешающий вход микросхемы ППЗУ - К537РФ6 заведен стробирующий выход адреса контроллера ALE, который свидетельствует об установке адреса ячейки памяти ППЗУ на шине адреса. При наличии сигнала выбора микросхемы для ППЗУ, оно (ППЗУ) выставляет на шину данных содержимое ячейки по указанному адресу. В остальных случаях выходы микросхемы памяти находятся в высокоимпедансном состоянии.
Также один из портов контроллера используется как вход от блока ввода и преобразования аналоговых сигналов, как строб завершения преобразования.
Четыре бита этого же порта используются для управления
29-04-2015, 01:59