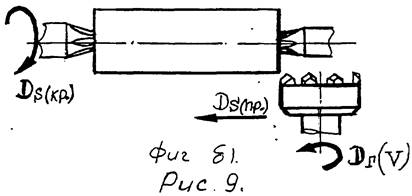
б) Если радиус инструмента Ru=/0, а его кромки представлена линией окружности и при этом на печать выводится условие Б=/(V); А=f(V), то из этого следует, что схема формообразования соответствует точению, а инструмент. ротационный резец. В противном случае: Б=f(V), А=f (S - движения подачи). Процесс соответствует фрезерованию, а инструмент - фреза, что также предусмотрено алгоритмом.
Таким образом, трансформация схемы формообразования определенной на ЭВМ как наиболее эффективная весьма проста. Поскольку печать ЭВМ конкретизирует движения, выполняемые в процессе формообразования, устанавливает равенство или неравенство нулю Ru=0 (Ru=/0). Определяет форму режущей кромки инструмента как линии и только в случае режущей кромки как пересечение двух линий (резец с углами в плане) представляет ее точкой. Поскольку трансформация информации полученной с ЭВМ в способ является простым изображением процесса как схемы резания со словесной констатацией типа инструмента, к которым следует отнести:
а) Фреза (Б=f(V); Ru=/0)
б) Резец простой (А=f(V); Ru=0)
в) Резец ротационный (Б=/(V); Б=/0; Ru=/0)
г) Фреза с винтовым зубом при конкретном значении угла подъема ее винтовой линии режущей кромки - (W=бО° - например) f1(р)=Ru sin(рA);
f2(р)=Ru cos(рA); fз(р)=РA.
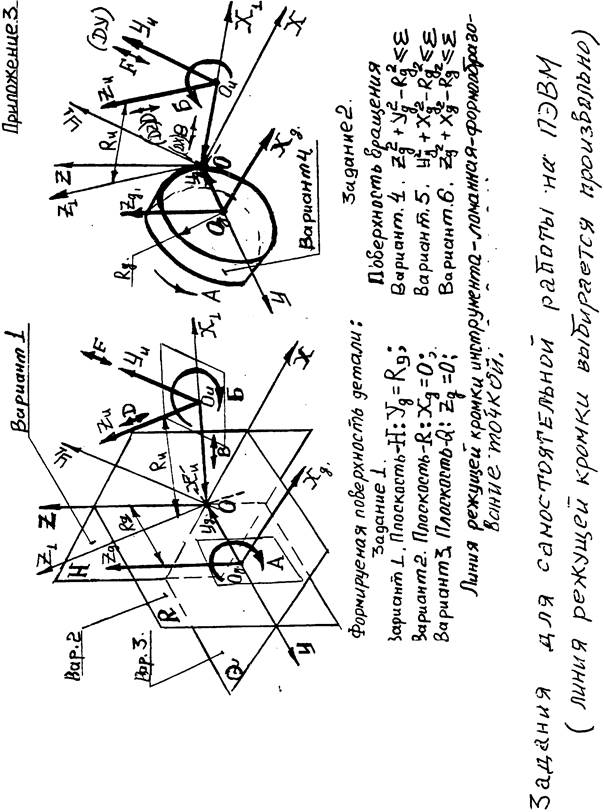
Наиболее сложные случаи трансформации схемы формообразования в способ механической обработки возникают при выводе на печать условий определяющих движение со скоростью, резания как результирующей, являющейся производной от двух выполняемых движений. Например: режущая кромка задана в виде винтовой линии с углом подъема от оси вращения лу=60° -произвольная величина. На печать выводится как самая производительная схема формообразования, эвольвентной поверхности прямозубого колеса схема содержащая три движения А=/0, Б=/0; Р=0. При их выполнении на скрещивающихся осях, когда угол поворота B=w, винта кромки инструмента. При этом скорость резания V=f(А и Б). В этом случае возникает несколько решений при трансформации схемы в способ формообразования. Чтобы избежать их требуется проанализировать процесс формообразования эвольвентной поверхности прямозубого колеса при задании линии кромки инструмента точкой и затем его кромки в виде окружности радиуса Ru.
Данная операция поможет установить те схемы резания, которые вытекают из первой сложной, с винтовой линией режущей кромки, при вращении которой существует переносное движение. Оно и будет найдено по величине если кромку представить точкой. Все схемы будут соответствовать зуботочению вдоль эвольвенты. Только в первом случае данное зуботочение будет осуществляться инструментом в виде фрезы, что легко устанавливается
28
Эскиз технологической операции на основании данной схемы может иметь следующий вид:
31
32
Литература
1.ЛашневС.И., Юликов М.И. Расчет и конструирование режущих инструментов с применением ЭВМ. М. 1975г.
2.КомаровВ.А. Некоторые вопросы теории формирования шероховатости поверхности в зависимости от технологических факторов обработки лезвийными инструментами. Кандидатская диссертация. М, ВЗМИ, 1978г.
33
29-04-2015, 04:05