Пронумеруем все звенья манипулятора от стойки (звено 0) до схвата (звена n) и свяжем с каждым из них свою систему декартовых координат, выбранную следующим специальным образом: ось Zi идет по оси кинематической пары (i, i+1); начало координат системы i, жестко связанной со звеном i, лежит на общем перпендикуляре к осям Zi-1 и Zi, либо в точке их пересечения, если таковая имеется, либо в любой точке оси кинематической пары, если ось Zi совпадает с осью Zi-1 или параллельна ей; ось Xi идет по общему перпендикуляру, проведенному к осям Zi-1 и Zi, и направлена от точки пересечения этого перпендикуляра с осью Zi-1 к точке его пересечения с осью Zi (или в любую сторону по нормали к плоскости, содержащей оси Zi-1 и Zi, если они пересекаются, или произвольным образом, если Zi-1 и Zi идут по одной прямой); ось Yi выбирается по правилу правой тройки векторов.
Начало координат системы 0, т.е. системы, жестко связанной со стойкой, может лежать в любой точке оси пары (0,1); ось Xо направляется произвольным образом.
Выбор системы n тоже выпадает из общего правила, так как звено n+1 отсутствует. Поэтому предлагается вообразить любого типа пару (n, n+1) и после этого выбрать систему по общему правилу. Начало выбранной таким образом системы называется центром схвата.
3.4.6 Расширенная матрица перехода для кинематической
пары. Определение положения и ориентации звеньев
Специальный выбор систем координат звеньев манипулятора позволяет с помощью лишь четырех параметров описать переход из одной системы в другую. Систему i-1 можно преобразовать в систему i с помощью поворота, двух сдвигов (переносов) и еще одного поворота, выполняемых в следующем порядке:
1) поворот системы i-1 вокруг оси Zi-1 на угол Qi до тех пор, пока ось Xi-1 не станет параллельной оси Xi;
2) сдвиг повернутой системы вдоль оси Zi на величину Si до тех пор, пока оси Xi-1 и Xi не окажутся на одной прямой;
3) сдвиг вдоль оси Xi на величину ai до тех пор, пока не совпадут начала координат;
4) поворот вокруг оси Xi на угол ai до совмещения оси Zi-1 c осью Zi.
Расширенная матрица имеет следующий вид:
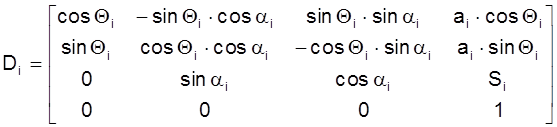
В расширенную матрицу Di входят четыре параметра: Qi , ai , Si , ai . Для любой кинематической пары три из них должны быть константами и только один - переменной величиной. Для вращательной пары переменной величиной является угол Qi , а для поступательной пары - перемещение Si .
Для определения положения и ориентации звена i в системе 0, следует найти произведение расширенных матриц А1, А2,... , Аi:
Ti = D1·D2· ... ·Di
Столбцы матрицы Ti имеют следующее геометрическое толкование: первые три элемента первого, второго и третьего столбцов представляют собой направляющие косинусы соответственно осей Xi, Yi, Zi в системе 0; три элемента четвертого столбца - это координаты xi, yi, zi центра системы i в системе 0.
3.4.7 Решение прямой задачи кинематики
Специальные системы координат выбираем в соответствии с указаниями (см. выше). Ось Z0 идет по оси поступательной пары (0,1), вдоль которой тело 1 поступательно перемещается относительно тела 0; ось Z1 идет по оси вращательной пары (1,2), т.е. по оси вращения тела 2; ось Z2 идет по оси вращательной пары (2,3); ось Z3 по оси поступательной пары (3,4); ось Z4 параллельна оси Z3 и проходит через центр схвата. Направление осей X, Y и положения начал координат показаны на конструктивной схеме (см. ниже).
Cоставим матрицы для всех звеньев. Для этого пронумеруем и определим параметры кинематических пар, а результаты занесем в таблицу, приведенную ниже.
|
Тип пары |
№ звена i |
||||
| Q | a | S | A | |||
| 0,1 | поступа-тельная | 1 | 0 | 0 | S1 | 0 |
| 1,2 | враща-тельная | 2 | -Q2 | p/2 | S2 | 0 |
| 2,3 | потупа-тельная | 3 | 0 | 0 | S3 | 0 |
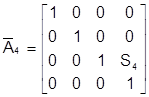
| 3,4 | поступа-тельная | 4 | 0 | 0 | S4 | 0 |
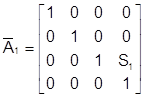
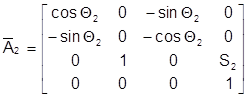
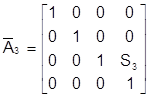
Для решения прямой задачи кинематики необходимо составить матрицы. В нашем случае матрицы A1 ,A3 и A4 - матрицы сдвига, а A2 - матрица вращения. Эти матрицы получаются из результирующей матрицы перехода, связывающей системы (i-1) и i.
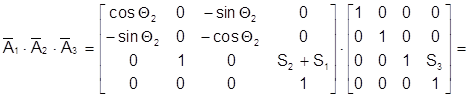
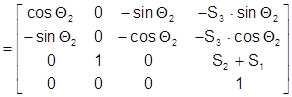
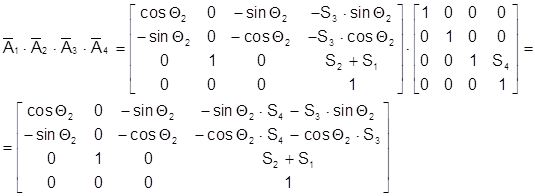
Рассчитаем результирующие матрицы перехода для заданной кинематической системы манипулятора.
 ;
;  ;
;  ;
;
Задача решается при помощи формулы:
![]()
Решение прямой задачи кинематики сводится к тому, что имея значения обобщенных координат определяются элементы матрицы T, которая однозначно устанавливает положение и ориентацию схвата в системе координат стойки.

Координаты центра схвата в системе, связанной со стойкой манипулятора:
3.4.8 Решение обратной задачи кинематики
Обратную задачу кинематики можно сформулировать так : задана кинематическая схема манипулятора и известны положение и ориентация схвата в системе координат стойки. Требуется определить значения обобщенных координат, которые обеспечат заданное положение схвата.
Задать положение схвата, как и любого твердого тела, можно с помощью шести величин. Обычно три из них - это координаты центра схвата, еще две - это направляющие косинусы одной из координатных осей схвата и последняя - это один из направляющих косинусов другой координатной оси схвата. Например, этими шестью величинами могут быть шесть наддиагональных элементов матрицы Тn.
Приравнивая шесть заданных величин соответствующим элементам матрицы Тn, получим систему шести уравнений (в общем случае трансцендентных), неизвестными в которых являются обобщенные координаты.
Если n = 6, то есть число неизвестных равно числу уравнений, то обычно можно отыскать вполне определенные значения обобщенных координат.
Если манипулятор имеет больше шести степеней свободы, то есть число неизвестных превышает число, то одному и тому же положению схвата могут соответствовать различные наборы значений обобщенных координат.
И наконец, если n < 6, то решения не существует, то есть за счет меньшего, чем шесть, числа обобщенных координат невозможно получить наперед заданные произвольные положение и ориентацию схвата.
Однако, если требуется лишь попадание центра схвата в определенную точку пространства ориентация схвата может быть любой, то для этой цели годится манипулятор с тремя степенями свободы. В этом случае при решении задачи потребуется составить лишь три уравнения для нахождения трех неизвестных.
Ниже, при решении обратной задачи кинематики всегда будем считать, что число неизвестных равно числу степеней свободы манипулятора.
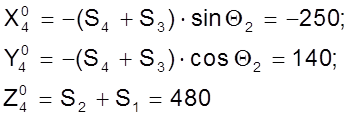
Приравнивая первые три элемента 4-го столбца матрицы T4 к заданным величинам X4 , Y4 и Z4 получаем систему трех уравнений.
(-250; 140; 480)
Принимаем S2 = 200, тогда S1 = 480 - 200 = 280
![]()
Принимаем S3 = 50, тогда S4 = 180.28 - 50 = 130.28
-150 = 180.28 * cos Q2 Þ cos Q2 = 0.832;
Q2 = 33°42¢ - 90° = -56°18¢
3.4.9 Проверка решения
Для подтверждения правильности выполненных расчетов сделаем проверку решения графическим методом.
3.5. Технические средства автоматизации систем управления гибких автоматизированных производств
Исходные данные.
1.Рабочий эскиз крышки подшипникового узла.
2.Геометрические параметры:
М=5х1;
ZMW =90мм;
диаметр фрезы dфр =210 мм;
размеры стола станка ХС=350 мм; YС=240 мм; ZС=390 мм;
значение шага интерполяции h=0,9 мм;
а также H=115мм; L=160мм; t=20мм;
l=150мм; b=50мм; d=35мм;
z1=55мм; z2=45мм; a=120
Разработка робототехнического комплекса и управляющей программы процесса сверления для изготовления крышки подшипникового узла.
Анализ эскиза показывает, что деталь имеет 3 отверстия Æ 4,2 мм и одно Æ 45 мм. Внешний контур детали имеет участок криволинейной поверхности. Чтобы изготовить деталь, нужен процесс фрезерования и процесс сверления, поэтому обработку целесообразно проводить на сверлильно-фрезерном расточном станке.
3.5.1 Выбор системы координат станка, детали и инструмента
![]()
ХMF =ХC /2=90мм
YMF =YC /2=80мм
ZFN =ZC =450мм
Рис 1. Выбор системы координат станка
![]() XMW=XMF-l/2=175-80=95 мм
XMW=XMF-l/2=175-80=95 мм
YMW=YMF-H/2+h=120-70+5=55 мм
(l=160 мм, H=140 мм, h=5 мм)
Рис 2. Выбор системы координат детали
![]()
Рис 3. Выбор системы координат инструмента
3.5.3. Выбор типовых переходов операций сверления
а) центрирование:
![]()
б) сверление 1:
![]()
сверление 2:
![]()
в) нарезание резьбы:
![]()
![]()
Рис 4. Выбор типовых переходов операции сверления
3.5.2 Составление эскиза процесса сверления
На основе выбранных типовых переходов и с условием размещения заготовки на столе стоставляем эскиз технологического процесса сверления.
Значения координат опорных точек
| № | Координаты опорных точек | ||||
| ХД , мм | YД , мм | ХС , мм | YС , мм | ZС , мм | |
| 1 | 54 | 25 | 79 | 35 | 210 |
| 2 | 132 | 70 | 157 | 80 | 210 |
| 3 | 54 | 115 | 79 | 125 | 210 |
| 4 | 80 | 70 | 105 | 80 | 210 |
ХД =80-52*sin30=54 мм
YД =70-52*cos30=25 мм
3.5.3 Кодирование управляющей программы процесса сверления
% LF
N1 G60 T0101, LF
N2 F40, S500, M06, LF
N3 G59 X25, Y10, Z210, LF
N4 X54, Y25, LF
N5 G82, R2, Z-3, LF
N6 X132, Y70, LF
N7 X54, Y115, LF
N8 G80 T0202, LF
N9 F100, S1400, M06, LF
N10 X54, Y25, LF
N11 G83 R2, Z-18, LF
N12 Z-32, F80, LF
N13 X132, Y70, Z-18, F100, LF
N14 Z-32, F80, LF
N15 X54, Y115, Z-18, F100, LF
N16 Z-32, F80, LF
N17 G80 T0404, LF
N18 F60, S360, M06, LF
N19 X80, Y70, LF
N20 G81 R2, Z-35, LF
N21 G80 T0505, LF
N22 F250, S250, M06, LF
N23 X54, Y25, LF
N24 G84 R2, Z-30, LF
N25 X132, Y70, LF
N26 X54, Y115, LF
N27 G80 G59 X0, Y0 , Z0, M09, LF
N28 G00 X0, Y0, Z390, M00, LF
Последовательность переходов операции сверления
| Переход | Номер отверстия | Схема рис.4 | Участок траектории | S, мм/мин | n, об/мин |
| Центриро-вание | 1,2,3 | а | 1-2 | 40 | 500 |
| Сверление | 1,2,3 | б1 | 1-2, 2-3 |
100, 80 |
1400 |
| Нарезание резьбы | 1,2,3 | в | 1-2 | 25 | 25 |
| Сверление | 4 | б2 | 1-2 | 60 | 360 |
![]()
![]()
![]()
3.6 Связь контроллера с ЭВМ верхнего уровня
(IBM PC)
В автоматизированной управления асинхронным двигателем, для которой разрабатывался рассматриваемый в данном дипломном проекте модуль ввода аналоговых сигналов, связь контроллера осуществляется через последовательный канал связи. При этом используется принятый фирмой IBM интерфейс RS-232C.
3.6.1 Схема гальванической развязки приемопередатчика микроконтроллера
Схема гальванической развязки приемопередатчика микроконтроллера предназначена для гальванической развязки линии связи и микроконтроллера, а также для преобразования сигнала передатчика TxD из ТТЛ-уровня в токовый параметр линии связи и сигнала поступающего из линии связи в сигнал RxD приемника ТТЛ-уровня.
Функциональная схема гальванической развязки приемопередатчика микроконтроллера приведенная на рис. , состоит из двух частей: гальванической развязки передатчика (VT1, VT2, VT3, U2, R2, R4, R6, R7) и схемы гальванической развязки приемника (U1, D1.1, R1, R3, R5). Диод VT1 выполняет защитную функцию при неправильной полярности подключения линии связи.
Схема гальванической развязки приемопередатчика работает следующим образом: в исходном состоянии с выхода передатчика TxD микроконтроллера подается уровень "логической единицы" (ТТЛ) на базу ключа VT3 через токоограничительный резистор R7. При этом транзистор VT3 открыт и шунтирует низким сопротивлением перехода коллектор - эмиттер светодиод оптоэлектронной пары U2. Это ведет к тому, что светодиод оптопары U2 не излучает и транзисторный ключ оптопары U2 закрыт. Из этого следует что транзисторный ключ, собранный на элементах VT1 и VT2, открыт током протекающим через резистор R2. В следствии этого линия связи будет закорочена через открытый переход коллектор - эмиттер транзистора VT1 и сравнительно низкое сопротивление R1. При этом на резисторе R1 создается падение напряжения, достаточное для открывания светодиода оптоэлектронной пары U1, что влечет за собой открытие транзисторного ключа оптопары U1. В этом случае на входе логического элемента триггера Шмитта присутствует уровень "логического нуля", а на его выходе - "логическая единица", что соответствует неактивному входному сигналу не входе RxD микроконтроллера.
При приеме информации, что равносильно размыканию линии связи, светодиод оптопары U1 закрывается, а значит и закрывается транзисторный ключ оптопары. На входе логического элемента триггера Шмитта появляется уровень "логической единицы", а на его входе "логический ноль", что соответствует активному сигналу на входе RxD микроконтроллера.
При передаче информации в линию связи уровень "логического нуля" на выходе TxD (что соответствует активному состоянию выхода) ключ на транзисторе VT3 закрывается, а светодиод оптопары U2 открывается вследствие протекания тока через резистор R6. Это приводит к открыванию транзисторного ключа оптопары U2 и, соответственно к закрыванию ключа на транзисторах VT1 и VT2, что соответствует разомкнутому состоянию линии связи.
Исходя из вышеописанного принципа работы модуля гальванической развязки следует отметить, что передаваемые сигналы от контроллера в линию связи будут дублироваться на входе приемника (RxD) микроконтроллера. Это обстоятельство должно быть учтено при программной реализации протокола обмена микроконтроллера с машиной верхнего уровня.
3.6.2 Интерфейс последовательного канала связи ЭВМ
с контроллером
Последовательный интерфейс обычно используется для большинства периферийных устройств, таких как плоттер, удаленный принтер, мышь, внешний модем, программатор ПЗУ и т. д. До настоящего времени для последовательной связи IBM PC-совместимых компьютеров используются адаптеры с интерфейсом RS-232C (Recommended Standart 232 Version C) (новая ревизия - EIA-232D). Описание этого интерфейса было опубликовано Американской промышленной ассоциацией еще в 1969 году. Европейским аналогом RS-232 являются два стандарта, разработанные CCITT (Comite Consultatif Internationale de Telegraphique et Telephonique) - МККТТ (Международный консультативный комитет по телеграфии и телефонии): V.24 (механические характеристики) и V.28 (электрические характеристики). Сегодня эта организация носит название ITU-T. Хотя первоначально RS-232 был предназначен для связи центральной машины с терминалом, его простота и богатые возможности обеспечили ему более широкое применение. В современном IBM PC-совместимом компьютере может использоваться до четырех последовательных портов, имеющих логические имена соответственно COM1, COM2, COM3 и COM4. Базовые адреса портов и соответствующие прерывания приведены в таблице
Таблица
| Обозначение | Диапазон адресов |
Прерывание |
| COM1 | 2F8h - 2FFh | IRQ4 |
| COM2 | 3F8h - 3FFh | IRQ3 |
| COM3 | 2E8h - 2Efh | IRQ10(IRQ2) |
| COM4 | 3E8h - 3Efh | IRQ11(IRQ5) |
Следует обратить внимание на тот факт, что использование прерываний IRQ10 и IRQ11 для последовательных портов возможно только на плате ввода-вывода для PC/AT (двойной слот). В компьютере, совместимом с PC/XT, для этой цели можно задействовать только два прерывания (IRQ4 и IRQ3) или использовать, если возможно, прерывание IRQ2 или IRQ5.
В адресном пространстве IBM PC-совместимых компьютеров последовательный адаптер занимает восемь последовательных адресов, включая базовый. Однако через эти восемь адресов происходит обращение к 12 регистрам, которые программируются соответствующим образом (приложение ).
По существу, сердцем последовательного адаптера является микросхема UART (Universal Asynchronous Receiver/Transmitter - универсальный асинхронный приемопередатчик). В IBM PC и PC/XT для этой цели использовалась микросхема типа 8250. После того как в ней были обнаружены ошибки, появились ее версии с буквами A и B. Для PC/AT решено было применить микросхему 16450, которая превосходила по скорости 8250. Улучшенной версией UART 16450 стала микросхема 16550. В настоящее время обычно используется UART 16550A. Данная микросхема имеет 16-символьный буфер на прием и на передачу, и, кроме того, может использовать несколько каналов прямого доступа в память DMA (Direct Memory Access). Другая версия этой микросхемы - 16550AFN.
Стандарт передачи и приема использует высокие уровни сигналов до +/-15 В или +/-12 В. Уровень логического нуля соответствует напряжению +12В, а логической единицы - -12 В. При передаче микросхема UART преобразует параллельный код в последовательный и передает его побитно в линию, обрамляя исходную последовательность битами старта, останова и контроля. При приеме данных UART преобразует последовательный код в параллельный (опуская служебные символы).
Основным преимуществом последовательной передачи является возможность пересылки данных на расстояния 1000 метров. В простейшем случае для приема и передачи через последовательный порт необходимо только три сигнала : TxD (Transmit Data - Передача данных), RxD (Recevive Data - Прием данных) и GND (Ground - "Земля").
В IBM PC-совместимых компьютерах существует два основных типа кабелей для интерфейса RS-232 : 25-сигнальный, изначально предусмотренный стандартом RS-232, и 9-сигнальный, используемый в соответствии с EIA-232D. При использовании последовательного интерфейса одно из устройств выступает как DTE (Data Terminal Equipment - Оконечное оборудование данных), а другое как DCE (Data Communication Equipment - Оборудование для передачи данных). Различие между ними состоит в направлении используемых сигналов. То есть, если сигнал для DTE является входным, то для DCE этот же сигнал будет выходным и наоборот.
Электрические параметры сигналов RS-232C:
Входное напряжение ± 3V ¸±15V ;
Входное сопротивление 3kOm ¸ 7kOm ;
Входное напряжение при нагрузке
3¸7 kOm .. 7,5±2,5V.
3.6.3 Организация обмена по последовательному каналу
Протокол информационного канала реализуется при помощи программного обеспечения, зашитого в ПЗУ. Информационный канал придает передаваемому сообщению определенную форму и в соответствии с этой формой упаковывает сообщение при передаче и распаковывает при приеме.
Аналогичную задачу должно решать программное обеспечение абонента.
Сообщение - это оформленная по определенным правилам последовательность байтов, имеющих помимо функционально законченной смысловой части также признак начала и конца сообщения.
Для передачи данных составим протокол обмена между контроллером и ЭВМ по последовательному каналу.
Обмен терминал-контроллер: посылки состоят из 5-ти байт.
1-й байт:
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 1 | 1 | X | X | X | X | X | X |
D7-D6 - признак старт-байта;
D5-D0 - поле команды.
2-й и 3-й байт:
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 0 | 0 | X | X | X | X | X | X |
D5-D0 -
29-04-2015, 04:12