БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра ЭТТ
РЕФЕРАТ
На тему:
«Понятие биоэлектрического образа движения»
МИНСК, 2008
Впервые идея управления по типу донор — реципиент (относительно управления работой сердца) была высказана в 1941 г. У. Итоном, который предложил для стимуляции сердечной деятельности пациента использовать активность (механическую или электрическую) сердечной мышцы другого человека.
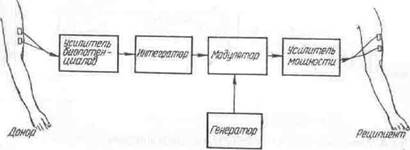
Рисунок 1 – Блок-схема одного канала устройства «Миотон».
В 1963 г. Лонг с сотрудниками (клиника Хайленд-Вью, Кливленд, США) разработали ортопедический аппарат - кистедержатель, в котором раскрытие кисти достигалось путем стимуляции паретических мышц — разгибателей. Источником сигналов для управления стимулятором служила мышца с сохранившейся иннервацией (в данном случае - трапециевидная). Отводимые от нее потенциалы после усиления поступали в стимулятор, частота и амплитуда импульсов которого были пропорциональны уровню биоэлектрической активности. Для осуществления раскрытия кисти пациент делал легкое движение плечом, посылая управляющее воздействие на стимулятор. Смыкание кисти достигалось пассивно за счет пружины. В дальнейшем исследования стимуляции мышц-разгибателей кисти с использованием в качестве управляющего сигнала преобразованных потенциалов трапециевидной мышцы провели Д. Томас и У. Крошетье, а также сотрудники группы кибернетических систем в инженерно-конструкторском центре Кейсовского технологического института (США) Л. Водовник к У. Маклауд.
Был изготовлен первый образец многоканального устройства биоэлектрического управления движениями человека, реализующий принципы биоуправляемой электростимуляции пропорционального типа. В основу действия устройства положен принцип многоканальной электростимуляции мышц реципиента, управляемой по программам, представляющим собой преобразованную биоэлектрическую активность мышц донора.
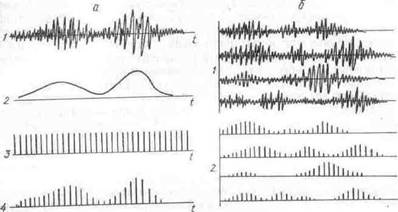
Рисунок 2 – Принцип действия устройства «Миотон»:а — эпюры сигналов в одном канале управлении (1 — на выходе УБП, 2 — на выходе интегратора, 3 — на выходе генератора, 4 — на выходе модулятора; б — вариант структуры многоканального сигнала (на примере четырех каналов) в устройстве, 1— на выходах УБП, 2 — на выходах модуляторов)
Отличительной особенностью устройства является то, что в качестве программы управления стимулирующими сигналами используется естественная электрическая активность мышц донора. Эта особенность в совокупности с многоканальностью позволяет учитывать в программе управления пространственно-временные отношения закономерностей участия различных мышечных групп донора в выполнении движения. Сигналы, отводимые при выполнении движения от тех или иных мышц донора с помощью поверхностных кожных электродов, после определенных преобразований управляют амплитудой стимулирующих сигналов, которые затем усиливаются и подаются на идентичные мышцы реципиента. В случае применения устройства в качестве программы управления работой мышц реципиента используется та последовательность включения работающих мышц донора и те изменения его мышечных усилий, которые наблюдаются при выполнении требуемого естественного двигательного акта. Реципиент при соответствующем подборе величины возбуждающих сигналов практически повторяет движение донора. Поскольку сигнал от донора может быть заранее записан в блоке магнитной памяти, то появляется возможность многократно повторять записанный алгоритм движения или делить предварительный «монтаж» с целью возобновления определенных движений. Благодаря наличию в устройстве нескольких каналов и применению в них в качестве управляющих воздействий преобразованной активности мышц, задающих программу движений, электростимуляции подвергается сразу несколько мышц человека (реципиента), движениями которого управляют в такой последовательности, в какой они сокращаются в естественных условиях. Это позволяет навязывать реципиенту ряд основных движении и повысить эффективность реабилитации при нарушениях двигательных функций, связанных с поражением центральной и периферической нервной системы.
При управлении движениями по типу донор - реципиент, осуществляемом с помощью устройства, система электростимуляции становится функционально более гибкой.
Возвращаясь к устройству, подытожим, что по своей структуре и функциональным характеристикам устройство можно классифицировать как разомкнутую систему непрерывного произвольного биоэлектрического управления. Система непрерывного управления: способ обработки регистрируемой интерференционной ЭМГ с целью выделения из нее полезной информации о движении дает возможность непрерывно осуществлять такое управление. Данная система произвольного управления, ибо оператор может произвольно, по собственному желанию, изменять степень сокращения скелетных мышц и тем самым изменять характеристику управляющих сигналов и давать команды о выполнении того или иного движения донору. Система - система пропорционального управления: параметры стимулирующего сигнала (в частности, амплитуда стимула) изменяются пропорционально изменению силовых характеристик сокращений мышцы. По технической реализации - разомкнутая система управления, ибо роль обратной связи в ней фактически выполняет оператор.
Физиологические предпосылки метода программного биоэлектрического управления. Управление движениями человека по методу многоканальной электростимуляции мышц с программным управлением преобразованными биопотенциалами (биоуправляемая электростимуляция) опирается на следующие предпосылки.
Функции аналогичных мышц управляющей конечности донора и управляемой конечности реципиента являются достаточно-идентичными. Это допущение вытекает из принципов функциональной анатомии и биомеханики. Те же самые мышцы действуют на суставы, обеспечивающие сходные движения. Идентичны принципы передачи силы, развиваемой мышцей, на костные рычаги.
Существует возможность селективного управления отдельной мышцей. Безусловно, селективное возбуждение отдельной мышцы без одновременного возбуждения других мышц требуете прежде всего правильного расположения электродов на мышцах,. выбора размеров и формы этих электродов. Только глубоко расположенные мышцы недоступны для поверхностных электродов, Если незначительное вовлечение дополнительных мышц и происходит, то оно не оказывает существенного влияния на процесс управления.
В некоторых пределах зависимости между силой и скоростью мышечного сокращения, с одной стороны, и параметрами интерференционной электромиограммы, отводимой поверхностными электродами,— с другой, почти линейны. Зависимости между параметрами стимула и силовыми характеристиками мышцы также близки к линейным . У изолированной мышцы развиваемая сила меняется при изменении длины.. Эти данные свидетельствуют, с одной стороны, о корреляции между силой, развиваемой мышцей, и ее длиной, с другой стороны, о том, что при постоянной величине силы, развиваемой мышцей, по путям нервной системы передаются разные сигналы, зависящие от длины мышцы.
Из п. 1 и 3 следует, что сила, развиваемая управляемой мышцей, пропорциональна силе, развиваемой управляющей мышце» (или величине стимула).
Подробные исследования параметров стимуляции показывают, что преобразованные потенциалы мышц, из которых извлекается полезная информация о характеристиках движения (об изменении суставною угла или усилия мышцы), можно использовать для управления стимуляцией более эффективно, чем непосредственно отводимые биопотенциалы.
В относительно простых (одноканальных) системах управления задач построения алгоритма управления ограничивается выделением из ЭМГ определенной мышцы того или иного ее параметра (огибающей, частоты и т. д.), несущего информацию о степени сокращения мышцы (мышечном усилии). В многоканальных системах биоэлектрического управления движениями человека, какой является устройство «Миотон», необходим еще один этап обработки управляющей информации, назначение которого состоит в выделении из совокупности данных об электрической активности разных мышц таких сочетаний, которые свойственны только этому движению и не встречаются при других. Такая совокупность временных, пространственных и амплитудных электромиографических характеристик получила название биоэлектрического образа движения.
Для выделения биоэлектрического образа производится текущая оценка электрической активности всех тех мышц, которые участвуют в данном движении. При этом параметры ЭМГ разных мышц (тянущих, стабилизирующих и антагонистов) учитываются с определенными весовыми коэффициентами. В результате формируется «матрица движения». Последняя является необходимым элементом в построении программы управления в «навязывании» реципиенту того или иного движения с помощью устройства.
Вторым необходимым элементом в получении конкретного движения является выбор основных мышц, участвующих в заданном движении, и разработка логики управления.
Ввиду того, что мышцы в живом организме действуют не изолированно и имеет место определенная координация сокращения различных мышц, получила распространение запись интегральных ЭМГ нескольких мышц данного сустава. Именно эта совокупность ЭМГ часто называется электромиографическим образом или ЭМГ картиной некоторого движения.
Каждому конкретному движению соответствует некоторый пространственно-временной образ, отображающий направление, степень и последовательность включения комплекса мышц, участвующих в выполнении этого движения.
Невыразительность и сравнительное однообразие ЭМГ картин о норме являются следствием того, что в норме совершаются одно временно не один, а несколько управленческих актов, т. е. как бы независимо работает не один, а несколько управляющих механизмов, передающих команды по одним и тем же эфферентным путям. Выключение некоторых отдельных управленческих систем в условиях нервно-мышечных патологий расчищает картину, делает ее более ясной и лучше «наблюдаемой» .
В основе понятия биоэлектрического образа движения лежит тот факт, что все движения (даже простейшие) реализуются группами мышц, вследствие чего обычно нельзя выделить какой-либо один «активный» участок для отведения ЭМГ. Понятие биоэлектрического образа движений уже четко просматривалось в работах тех исследователей, которые занимались проблемой биоэлектрического управления протезом конечности . Этим же понятием оперируют при рассматриваемом нами биоэлектрическом управлении движениями человека.
На процесс выполнения движений существенное влияние оказывают условия, при которых происходит движение. Если в процессе выполнения конкретного движения изменить внешние условия (например, положение частей тела человека), то двигательный образ выразит реакцию как на само изменение условий (переходный процесс), так и на результат этого изменения спустя некоторое время (установившийся процесс). Иными словами, тому же движению человека при новых внешних условиях будет соответствовать новый двигательный образ, «созданный» с учетом новых условий. Поэтому на практике обычно чрезвычайно трудно в точности повторить одно и то же относительно сложное движение многократно. Очень трудным является и получение конкретных величин составляющих двигательного образа, так как для этого необходимо измерить силу и скорость сокращения всех мышц, участвующих в движении в каждый момент времени. Электромиографический образ, представляющий собой электрический аналог движения, может быть получен путем одновременного снятия электромиограмм мышц, участвующих в движении. Хотя одновременное отведение электромиограмм всех мышц, участвующих в данном движении, также наталкивается на определенные технические трудности (например, связанные с взаимным влиянием электромиограмм в каналах отведения), получение электромиографического образа все же возможно.
Поэтому важно рассмотреть вопрос о соответствии электрической компоненты мышечной активности силе и скорости сокращения мышцы.
Ортодоксальный метод требует исчерпывающего знания характеристик огромного многообразия биоэлектрических сигналов. Возможности этого метода ограничены ввиду отсутствия подобной информации. При недетерминистском подходе принимается, что все биоэлектрические образы относятся к одному из двух статистических классов, причем каждый образ содержит множество переменных. Исследования по распознаванию комбинаций биоэлектрических сигналов мышц, возникающих при различных движениях, приводят к выводу о возможности различения некоторых двигательных актов с помощью биоэлектрического образа.
Сделана попытка идентификации движений тела с помощью определения формы электрических сигналов, связанных с этими движениями (при многоканальной регистрации).
В поисках закономерностей проявления биоэлектрического образа немалую роль играют вопросы, связанные с определением порога выделения биоэлектрического образа, т. е. с определением усилий, при которых возникает четкое различие в активности мышц, характеризующее биоэлектрический образ.
Выбор мест отведения и подачи стимулирующих сигналов. Управление движениями в организме основано на формировании в ЦНС двигательных программ и их передаче по эфферентным путям к исполнительным органам - мышцам, отвечающим на поступление к ним нервных импульсов реакцией возбуждения, проявляющейся в виде механических и электрических феноменов.
При искусственном управлении движениями на основе биоэлектростимуляции мышц нужно, во-первых, обеспечить отведение ЭМГ мышц, участвующих в программном движении, и, во-вторых, провести обработку отведенных миопотенциалов, в результате которой они были бы превращены в сигналы управления электростимуляцией мышц.
Успешная реализация системы биоэлектрического управления движениями связана прежде всего с вопросом о выборе мест отведения командных сигналов. Поиски таких мест продиктованы стремлением получить наиболее выгодное соотношение сигнал/шум. Первостепенное значение приобретает вопрос о выборе тех мест отведения сигналов, которые обеспечивают получение информации, наиболее полно отражающей структуру произвольного движения.
Согласно современным представлениям, управление движениями человека и животных осуществляется многоуровневой иерархически организованной системой. Остановимся на возможности использования нервных команд, поступающих к мышцам при произвольных движениях, для целей управления.
Известно, что наряду с моторной зоной коры, дающей начало пирамидной системе, важную роль в формировании произвольных движений играют и другие корковые поля, отделы ЦНС, объединяемые обычно в экстрапирамидную систему. Уже по этой причине нельзя считать, что существует одна, строго локализованная область, ответственная за инициацию первичных двигательных команд. Далее полагают, что начальные двигательные команды содержат лишь самые главные характеристики будущего движения («скелет движения»), пополняющиеся необходимыми деталями по мере включения в деятельность других нервных центров - базальных ганглиев, ядерных структур мозгового ствола, ретикулярной формации, мозжечка. По этим причинам, а также в связи с техническими трудностями отведения и выделения из электроэнцефалограммы информации, относящейся к произвольным движениям, в настоящее время не представляется возможным использовать сигналы нервных структур, ответственных за инициацию движения.
Можно использовать нервные команды произвольных движений, отводя соответствующую электрическую активность не в ЦНС, а на периферии. Так, вполне доступно отведение сформированных двигательных команд от двигательных нервов, которые являются выходом ЦНС. В этом случае мы воспринимаем сигналы, прошедшие все этапы формирования. Однако и здесь возникают существенные трудности. Во-первых, периферические нервы являются обычно смешанными, включающими волокна двигательных и чувствительных нервных клеток. Поэтому при отведении такой активности мы будем иметь дело не только с двигательными командами, но и с сенсорными сигналами (эфферентные и афферентные команды). Во-вторых, суммарная электрическая активность нервного ствола обычно содержит эфферентные команды, адресованные не к одной, а к нескольким мышцам.
В силу приведенных соображений наиболее удобным оказывается отведение двигательных команд непосредственно от мышцы. В этом случае регистрируемая активность имеет достаточно точный адрес, она прошла все уровни формирования. Технически значительно проще и надежнее отводить импульсы от мышцы, чем от нерва. Наконец, амплитуда миограммы при используемых на человеке приемах отведения больше, чем амплитуда нейрограммы. Речь идет не об отведении электрической активности отдельной двигательной единицы (ДЕ), которая в силу ряда причин не может служить характеристикой активности всей мышцы и избирательное отведение от которой представляется сравнительно сложной задачей, а об отведении интерференционной ЭМГ поверхностными электродами, которая обусловлена сложением множества случайных некогерентных потенциалов отдельных ДЕ. В этом случае производится измерение некоторой функции от общего числа возбужденных в данный момент времени ДЕ. Такая интерференционная ЭМГ дает возможность участие мышц в различных движениях, последовательность их включения и выключения, интегральный уровень возбуждения, соотношение активности мышц в разные периоды формирования двигательных навыков и т. д. Таким образом, для задач биоэлектрического управления движениями отведение ЭМГ поверхностными электродами оказалось наиболее удобным.
При поверхностном отведении электроды располагаются на поверхности кожи тела, измеряя тем самым разность потенциалов между точками электрического поля, образованного на поверхности активностью генераторов, находящихся в глубине ткани. Изменение величины потенциалов в зависимости от удаления электродов от источника колебаний подчиняется общим законам проведения. Потенциала в объемном проводнике. Например, при удалении от источника на 0,36 мм амплитуда потенциала ДЕ уменьшается в 10 раз.
Поверхностные электроды характеризуются большей поверхностью отведения, удобны в изготовлении и эксплуатации и не травмируют пациента. В простейшем случае такой электрод состоит из двух металлических неполяризующихся дисков (например, из серебра, покрытого слоем хлористого серебра), укрепленных на некотором расстоянии друг от друга на одной изолирующей основе. Крепят такие электроды над так называемой двигательной точкой мышцы с помощью резиновых ремней или лейкопластыря. Для уменьшения сопротивления между электродами и кожей применяются различные электропроводимые пасты и растворы.
При электростимуляции с помощью поверхностных электродов различают стимуляцию «мышечную» и «нервную» (прямую и непрямую). Такое разделение условно, поскольку по мере увеличения интенсивности стимула наступает сначала возбуждение афферентных нервных волокон, а затем эфферентных, которые в свою очередь возбуждают мышцы. Порог возбуждения непосредственно мышечной ткани при этом обычно не достигается. Условно можно считать, что мы имеем дело с мышечной стимуляцией, когда раздражают двигательные точки мышц, имеющие минимальные пороги возбуждения (при этом можно возбуждать отдельные мышцы), и с нервной стимуляцией, когда электрод на коже располагают над нервным стволом (при этом часто стимулируются целые группы мышц, иннервируемые данным нервом, что не всегда необходимо).
Для сокращения мышцы активный электрод располагают на точке, помещающейся примерно на середине мышечного брюшка. Считается, что этот участок соответствует зоне разветвления нервных ветвей, идущих в глубину мышцы, либо области наиболее поверхностного расположения нервных волокон.
При стимуляции мелких мышц активный электрод располагают непосредственно над двигательной точкой данной мышцы.На крупных мышцах голени, бедра и т. п. электроды часто располагают ближе к области перехода мышцы в сухожилие (в силу анатомических особенностей этих мышц, в частности характера развития подкожной клетчатки).
В процессе сокращения мышцы двигательная точка (точнее, двигательная область) может смещаться, в связи с чем, возникает проблема поддержания локализации электрода над двигательной областью. Размеры двигательной области определяют размеры, форму электродов и требования к их креплению на конечности человека. Известно, что различные мышцы имеют разную относительную локализацию двигательной области. Практически протяженность двигательной области можно ограничить областью расположения электродов, в пределах которой момент развиваемой мышцами силы падает не более чем, например, до 50% максимальной величины момента.
Размеры применяемых электродов зависят от того, что необходимо стимулировать - нерв или мышцу. В первом случае площадь электродов меньше. В некоторых случаях применение больших электродов нецелесообразно, поскольку они могут инициировать двигательные области разных мышц, одновременная стимуляция которых может оказаться нежелательной. В то же время иногда необходима и одновременная стимуляция группы мышц-синергистов (например, для коррекции разгибания в коленном суставе).
В мышцах с параллельными волокнами нервно-мышечные окончания образуют зону максимальной плотности иннервации, расположенную поперек мышцы, в двуперистых и других сложно устроенных мышцах эта зона может иметь другую форму. В некоторых мышцах имеются две зоны иннервации и более в связи с тем, что он» состоят из
8-09-2015, 22:49