БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
кафедра ЭТТ
РЕФЕРАТ на тему:
« Искусственная коррекция движений »
МИНСК, 2008
Метод и устройство программируемой электростимуляции мышц при патологической ходьбе.
Реабилитация больных с вялыми параличами нижних конечностей до сих пор является актуальной проблемой. В течение длительного времени проблема восстановления двигательных функций сводилась к применению различных методов лечебной физкультуры (ЛФК), физиотерапии и протезирования.
Различают периферические (вялые) парезы и параличи (ограничение активных движений) возникающие при травмах или заболеваниях нервов, нервных сплетений, нервных корешков. Периферические парезы и параличи характеризуются дряблостью (вялостью) пораженных мышц. Другая группа - это центральные (спастические) парезы и параличи (ограничение активных движений) возникающие при травмах и заболеваниях головного и спинного мозга. Центральные парезы и параличи характеризуются плотностью (спастикой) пораженных мышц.
В результате углубленных клинических и биотехнических исследований разработаны метод и устройства искусственной коррекции движений (ИКД), предназначенные для медицинской реабилитации большого контингента больных с нарушениями опорно-двигательной системы.
Метод ИКД. Сущность метода ИКД состоит в применении многоканальной электростимуляции (ЭС) мышц в точном соответствии с естественной программой возбуждения и сокращения мышц в двигательном акте. Благодаря этому в процессе многодневной тренировки повышается жизнедеятельность мышц, корректируются нарушенные движения и вырабатывается приближенный к норме двигательный стереотип.
Помимо терапевтической функции (усиления работы мышц и выработки стереотипа) метод ИКД имеет диагностическую и прогностическую функции.
Диагностическая функция состоит в распознавании дефицита мышечной функции (ДМФ) при ходьбе, его степени и фазы проявления в цикле.
Прогностическая функция тесно связана с предыдущей: эффективная коррекция движений во время пробного сеанса ЭС мышц при ходьбе дает основание для благоприятного прогноза.
Установлено также, что метод ИКД имеет значительные преимущества перед ЛФК и ЭС в покое, благодаря высокой избирательности, точности воздействия и эффектам быстрого восстановления координации движений.
Благодаря этой концепции значительно расширяется сфера применения метода ИКД: практически она распространяется на пять областей медицины: неврологию, нейрохирургию, травматологию, ортопедию и протезирование, однако не исключена возможность ее применения в других медицинских дисциплинах (ангиологии и кардиологии).
Реализация метода ИКД складывается из пяти основных операций.
1. Выбор корректируемых движений и стимулируемых мышц, определяющий их наиболее рациональную комбинацию. Выдвинуты три основные принципа выбора: энергетический (применение наименьшего числа, но наиболее эффективных коррекций), синдромологический (независимость коррекционных воздействий от этиологии и патогенеза заболеваний) и динамический, в соответствии с которым в первую очередь к ЭС должны быть привлечены мышцы-разгибатели нижних конечностей и туловища, обеспечивающие устойчивость тела и локомоторную функцию при ходьбе, а лишь затем мышцы-сгибатели, имеющие коррекционную функцию. Предложена оригинальная классификация коррекционных воздействий: основные, дополнительные и вспомогательные.
2. Установление вида и параметров ЭС мышц. На основе биотехнических исследований определены следующие параметры стимулирующих импульсов (СИ): последовательность СИ прямоугольной формы (однофазных и бифазных) с частотой следования до 50 - 60 Гц, длительностью от 20 до 255 мкс, амплитудой до 60 - 70 В (или силой тока до 255 мА). Приведенные параметры обеспечивают в пределах комфортной (безболевой) зоны достаточный коррекционный эффект.
3. Определение алгоритма временной программы ЭС мышц в течение цикла. Построение временной программы ЭС в соответствии с фазами возбуждения и сокращения мышц в локомоторном цикле при разных темпах ходьбы. Во всех вариантах построения временной программы для согласования ЭС с фазами шага использованы датчики, регистрирующие угловые перемещения в суставах нижних конечностей.
4. Выбор типа, размеров накожных электродов. Разработаны эластичные многослойные электроды, содержащие углеродистую токопроводящую ткань; установлена прямоугольная форма электродов. Расположение электродов на теле соответствует анатомической локализации мышц.
5. Поиск рационального режима ЭС при ходьбе. Выяснена средняя интенсивность электрического раздражения мышц, вызывающая прирост на 20 - 25% их произвольного сокращения при ходьбе, выбрано время коррекционной тренировки (40 - 60 мин.), предельное расстояние, проходимое больным с коррекцией движения (2 км), максимальное число ежедневных сеансов (15 - 20 в течение месяца).
Средства аппаратной реализации метода ИКД.
На основе метода ИКД разработаны два типа многоканальных корректоров, представляющих собой электронные стимуляторы, обеспечивающие подачу стимулирующих сигналов в соответствующие фазы шага.
В настоящее время разработан восьмиканальный корректор движений, управляемый персональным компьютером. Главное его отличие от ранее применявшейся системы коррекции движений состоит в том, что этот корректор полностью адаптирован к темпу выполняемых движений.
Алгоритм работы корректора состоит в том, что измеряется длительность цикла между экстремальными значениями суставных углов и программируются фазы электростимуляции мышц в % к длительности цикла в соответствии с электромиографическим профилем мышц. Параметры ЭС: последовательность электрических прямоугольных импульсов по восьми каналам частотой 40 - 100 Гц, амплитудой от 30 до 255 мА (дискретность установки 1 мА), длительностью от 20 до 255 мкс (дискретность установки 1 мкс). Точность выполнения временной программы ЭС - 1% цикла предыдущего шага.
Портативные системы предназначены для использования средств ИКД с целью закрепления двигательных навыков, сформированных во время лечения в стационаре.
В 1987г. начат серийный выпуск портативного корректора движений, названного аппаратом ортопедическим АН8-27. Прибор предназначен для коррекции ходьбы больных с парезами ног и инвалидов на протезах нижних конечностей.
Ортопедический аппарат АН8-27 предназначен для коррекции элементов ходьбы больных с паралитическими заболеваниями нижних конечностей, а также для тренировки ослабленных мышц посредством их стимуляции при ходьбе и в покое с целью улучшения стояния и ходьбы больного.
Стимулятор питается от аккумулятора напряжением 9 В. Масса стимулятора 310 г. Габаритные размеры 124 х 93 х 43 мм.
Аппарат состоит из двухканального портативного электростимулятора, датчиков синхронизации стимуляции с фазами шага, электродов и креплений узлов аппарата на теле больного (см. рис. 1).
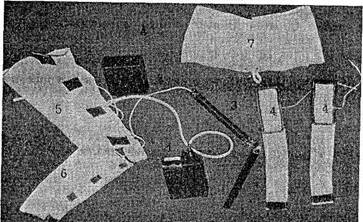
Рис. 1. Ортопедический аппарат АН8-27.
Основные части аппарата: 1—двухканальный электростимулятор, 2—зарядное устройство, 3—датчик синхронизации, 4 — электроды, 5 — манжета бедра, 6 — манжета голени, 7—бандаж.
Внутри пластмассового корпуса электростимулятора расположены печатная плата, источник питания — аккумуляторная батарея, подстроечные резисторы и переключатель режимов работы. На передней панели электростимулятора находятся элементы управления.
Переключатель предназначен для выбора режима работы электростимулятора: «Т» — тренировка, «К»— коррекция. Электроды и датчики синхронизации подключают к электростимулятору с помощью многоштырькового разъема. Для визуального контроля стимулирующего сигнала на выходе стимулятора на его передней панели находится световой индикатор.
В конструкции печатной платы предусмотрена возможность переключения входа узлов, задающих программу электростимуляции, к датчикам синхронизации в фазу сгибания или разгибания в суставе конечности. Для каждого больного по усмотрению врача осуществляется выбор фазы синхронизации. С помощью переключателя амплитуды напряжение стимулирующих импульсов можно устанавливать в пределах 30 или 60 В.
Внутри корпуса на печатной плате находятся подстроечные резисторы. С их помощью индивидуально подбирают задержку стимулирующих сигналов относительно момента синхронизации в пределах от 0,09 до 0,90 с, а также устанавливают частоту следования стимулирующих импульсов в диапазоне от 30 до 60 Гц и длительность стимуляции.
Датчик синхронизации представляет собой устройство контактного типа и содержит верхнюю и нижнюю бранши, соединенные осью вращения. На оси установлен кулачок, с помощью которого при заданной величине угла между браншами осуществляется включение контактного элемента. Вращением кулачка с последующей его фиксацией можно установить необходимый угол срабатывания датчика синхронизации.
Тканные электроды, имеющие многослойную структуру и содержащие токопроводящую ткань, укрепляют на теле больного над стимулируемой мышцей. Электроды имеют различные типоразмеры: от 30X30 мм до 60x260 мм (в зависимости от того, какие мышцы должны быть подвергнуты стимуляции).
Бранши датчиков и электроды крепят на больном с помощью эластичных манжеток голени и бедра и специального эластичного пояса, если электроды располагаются на тазовом поясе. При этом датчик синхронизации вставляют в кожаный карман, пришитый снаружи к манжеткам голени и бедра.
Методика проведения сеансов коррекции ходьбы с помощью аппарата АН8-27 принципиально не отличается от методики, применяемой на стационарной установке. После того как на больного надеты электроды, смоченные водой и зафиксированные манжетками, и укреплен датчик синхронизации, осуществляют выбор амплитудной и временной программ ЭС паретичных мышц. Интенсивность ЭС мышц определяется тремя параметрами: амплитудой напряжения электрического сигнала, частотой следования и длительностью стимулирующих импульсов. Сначала устанавливают величину амплитуды напряжения, дискретно изменяя ее от 30 до 60 В при минимальной длительности импульса, затем плавно увеличивают длительность импульса до достижения необходимой степени сокращения мышц. Обычно подбирают такую интенсивность ЭС мышц, которая при кратковременном применении (не дольше 0,6 с) обеспечивает отчетливую коррекцию движений при ходьбе. Частота следования импульсов при этом должна быть равна 50—60 Гц.
Временную программу выбирают с учетом вида стимулируемой мышцы и темпа ходьбы. Определение временной программы состоит в установке необходимого угла синхронизации, выборе фазы синхронизации, длительности задержки и самой стимуляции. Все эти параметры должны быть установлены техником совместно с врачом стационара протезно-ортопедического предприятия в процессе протезирования аппаратом АН8-27. Для этого на предприятии необходимо иметь установку, позволяющую вывести угол датчика и отметки начала и конца серии стимулирующих импульсов на электронно-лучевой осциллограф. Полученные техником замеры параметров ЭС затем переносят па портативный электростимулятор.
Результаты реабилитации больных с поражениями и заболеваниями опорно-двигательной системы.
ИКД применен с высоким клиническим результатом больным: при последствиях полиомиелита, при последствиях повреждений спинного мозга на разном уровне, при детском церебральном параличе, при гемипарезе вследствие острого нарушения мозгового кровообращения, при I - II стадиях сколиотической болезни, при остеохондрозе пояснично-крестцового отдела позвоночника, при переломах тел грудных и поясничных позвонков, при переломах костей голени с образованием ложных суставов, у инвалидов с культями голени или бедра, пользующихся протезами нижних конечностей.
Установлено, что за 20-дневный курс лечения удается получить такой восстановительный эффект, который при других способах реабилитации достигается лишь после упорной многомесячной тренировки, особенно при последствиях спинномозговых повреждений. В целом сроки реабилитации могут быть сокращены в 2 - 3 раза.
Показано, что у больных, получивших лечение с применением метода ИКД, наблюдается два типа изменений: во-первых, повышаются функциональные свойства мышц, во-вторых, нормализуется биомеханическая и иннервационная структура ходьбы. Первое выражается в увеличении силы мышц, повышении их максимальной электрической активности, улучшении кровообращения конечности. О втором свидетельствует:
1. возрастание основных характеристик ходьбы (темпа, длины шага, скорости);
2. нормализация временной структуры шага;
3. приближающийся к норме рисунок движений в основных суставах ноги, уменьшение хромоты, раскачиваний туловища;
4. возрастание опорной и толчковой функций нижних конечностей;
5. увеличение активности и упорядочение работы мышц при ходьбе;
6. снижение энергозатрат.
В клиническом плане наблюдается повышение устойчивости и большая выносливость при ходьбе, уменьшение использования опоры на костыли и трости, купирование болевого синдрома при корешковых заболеваниях, нормализация формы позвоночника при сколиозе, более быстрое и полноценное сращение костей голени, улучшение функции тазовых органов при спинномозговых поражениях и другие положительные симптомы.
Метод ИКД имеет широкую перспективу применения в различных областях отечественной медицины для более эффективной реабилитации больных и инвалидов с поражениями и заболеваниями опорно-двигательной системы.
ЛИТЕРАТУРА
1. Белова А.Н. Нейрореабилитация .-М. Антидор, 2000 г. – 568с.
2. Прикладная лазерная медицина. Под ред. Х.П. Берлиена, Г.И. Мюллера.- М.: Интерэкспорт, 2007г.
3. Александровский А.А. Компьютеризованная кардиология. Саранск; "Красный Октябрь" 2005: 197.
4. Разработка и постановка медицинских изделий на производство. Государственный стандарт Республики Беларусь СТБ 1019-2000.
5. Штарк М.Б., Скок А.Б. Применение электроэнцефалографического биоуправления в клинической практике. М. - 2004 г
6. Боголюбов В.М., Пономаренко Г.Н. Общая физиотерапия. М.,СПб.: СЛП, 2008.
7. Ультрафиолетовое излучение в профилактике инфекционных заболеваний./ А.Л. Вассерман, М.Г. Шандала, В. Г.Юзбашев. М. 2003г.
8-09-2015, 22:10