Указанное ограничение возникает по двум причинам:
из-за зависимости доплеровского сдвига от частоты излучения;
из-за необходимости фильтрации принимаемого сигнала.
Допплеровский сдвиг (разность частот излучаемого и принимаемого сигнала) прямо пропорционален частоте ультразвукового сигнала, на которой проводится исследование кровотока - т.е. чем ниже частота ультразвука, тем меньше допплеровский сдвиг, получаемый при обследовании одного и того же кровотока на различных частотах.
Ограничения, налагаемые на частотный диапазон существующих допплеровских измерителей скорости кровотока, обусловлены, в основном, двумя причинами:
сложностью получения приемлемых параметров ультразвукового преобразователя, выполненного на основе пьезокерамики, для работы на частотах свыше 10 МГц. Толщина пьезокерамической пластины, используемой в качестве активного элемента, составляет половину длины волны, и на частотах свыше 10 МГц становится меньше 0.2 мм. Из-за существования пор в объеме керамики, напыляемые на противоположные поверхности пьезокерамической пластины электрические контакты образуют электрические соединения друг с другом через эти поры, и такой преобразователь становится непригодным для работы;
существующие в настоящее время схемы построения блоков обработки сигналов ультразвуковых преобразователей (в диапазоне до 16 МГц) предполагают производить эту обработку непосредственно в высокочастотной области, что приводит к усложнению схемы, и как следствие, к заметному удорожанию всего допплеровского комплекса.
Основываясь на всем выше сказанном, функциональную схему прибора можно выполнить следующим образом (см. приложение 1).
Рассмотрим работу данной схемы. Сигнал U1, вырабатываемый генератором представляет собой последовательность прямоугольных импульсов f =4МГц. Затем он посылается на буфер, который повторяет сигнал по напряжению и усиливает его по току. На микросхемах DD1, DD1.4 и DD1.5 реализован формирователь импульсов U2 и U3, сдвинутых на ![]() , необходимых для раскачки транзисторов VT1 и VT2.
, необходимых для раскачки транзисторов VT1 и VT2.
На вторичной обмотке трансформатора формируется двухполярный сигнал U4, который поступает на излучающий пьезоэлемент измерительного преобразователя. Отраженный U6 улавливается приемным пьезоэлементом преобразователя.
Затем сигнал пропускается через повторитель и поступает на усилитель и избирательный фильтр, на выходе которого имеем U7. Полученный сигнал проходит через блок автоматической регулировки усиления, основной задачей которого является изменение коэффициента передачи приемного тракта локатора таким образом, чтобы уровень эхосигнала на выходе приемного блока зависел только от размера цели и не зависел от расстояния от преобразователя.
Для детектирования доплеровского смещения полученный сигнал необходимо подать на смеситель, на выходе которого имеем U8. Частотный спектр этого сигнала широк, поэтому для выделения нужной нам полосы ставим последовательно два фильтра: фильтр низких частот (ФНЧ) и фильтр высоких частот (ФВЧ). После этого сигнал усиливается и в итоге получаем полезный сигнал U9, который поступает на входы блока оптической и акустической индикации.
Блок оптической индикации содержит компаратор (преобразующий изменяющийся во времени сигнал в прямоугольные импульсы), фильтр, повторитель и светодиод.
Блок звуковой индикации состоит из двух последовательно стоящих фильтров нижних и верхних частот и акустического низкочастотного излучателя.
3. Разработка электрической принципиальной схемы прибора
3.1 Описание работы прибора на основании электрической принципиальной схемы
Схема электрическая функциональная приведена в приложении 2.
Для формирования прямоугольных импульсов частотой 4 МГц используем генератор типа К555ЛА3 на логических элементах DD1.1 и DD1.2 с кварцевой стабилизацией. Резистор R1 переводит элементы в активный режим. Для подстройки частоты резонанса используется переменный конденсатор С1. На выходе генератора получаем сигнал U1 (рис.8).

Рис.8. Эпюры напряжений
Сигнал U1 поступает на синхронизирующий вход триггера типа К555ТМ2 DD2, на выходах которого формируются противофазные импульсы напряжения U2 и U3 с частотой 2 МГц. Эти напряжения через элементы DD1.4 и DD1.5 и резисторы R3 и R4 поступают на транзисторы (КТ316А) VT1 и VT2, работающие в ключевом режиме и нагруженные на трансформатор Т1. Ко вторичной обмотке трансформатора Т1 подключен излучающий преобразователь BQ1. Приемный преобразователь BQ2 подключен ко входу приемного тракта через разделительный трансформатор Т2. Трансформаторы Т1 и Т2 обеспечивают дополнительную гальваническую развязку акустических преобразователей от электронных блоков прибора.
В качестве приемного блока DA1 используем микросхему К174ХА2.
3.2 Расчет основных параметов схемы
Частота генератора - 4 МГц. Зададим ![]() =10пФ. Зная соотношение для времени периода
=10пФ. Зная соотношение для времени периода ![]() (время от начала одного импульса до начала следующего), можно найти сопротивление
(время от начала одного импульса до начала следующего), можно найти сопротивление ![]() .
.
![]()
![]()
![]()
![]()
Произведем расчет транзисторов ![]() и
и ![]() (рис.9).
(рис.9).
Рабочая частота равна ![]() МГц. Тогда:
МГц. Тогда:
![]()
Найдем длительность импульса, зная период ![]() (рис.10).
(рис.10).
![]()
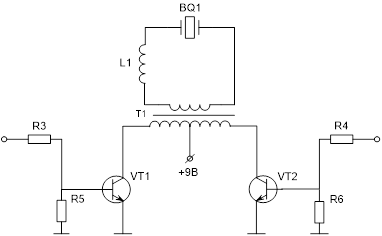
Рис.9. Трансформатор Т1 и транзисторы VT1 и VT2
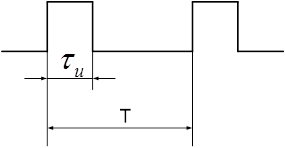
Рис.10. Период и время импульса
Транзисторы должны удовлетворять условию
![]() .
.
Для нашего случая выберем транзистор типа КТ316А и проведем расчет величины времени нарастания ![]() (по этому параметру можно будет судить о правильности выбора типа транзистора).
(по этому параметру можно будет судить о правильности выбора типа транзистора).
Время нарастания можно найти, используя формулы:
![]()
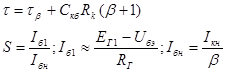
![]() ,
,
где ![]() - коэффициент трансформации;
- коэффициент трансформации;
![]() - напряжение возбуждения транзистора;
- напряжение возбуждения транзистора;
![]() - пороговое напряжение перехода база - эмиттер кремниевого транзистора;
- пороговое напряжение перехода база - эмиттер кремниевого транзистора;
![]() собственные параметры транзистора.
собственные параметры транзистора.
Транзистор типа КТ316А имеет следующие параметры:
![]()
![]()
![]() .
.
Учитывая, что ![]()
![]()
![]() получим:
получим:
![]()
![]()
![]()
![]()
![]()
Таким образом, видно, что рассчитанная величина времени нарастания ![]() меньше требуемой величины
меньше требуемой величины ![]() ; следовательно, тип транзистора нами выбран правильно. Произведем расчет трансформатора.
; следовательно, тип транзистора нами выбран правильно. Произведем расчет трансформатора.
Индуктивность первичной обмотки определим из условия:
![]()
где ![]() - приведенное к первичной обмотке сопротивление нагрузки.
- приведенное к первичной обмотке сопротивление нагрузки.
![]() .
.
Далее проведем расчет типоразмера магнитопровода и его начальной магнитной проницаемости ![]() .
.

где ![]() -средняя эффективная линия (см);
-средняя эффективная линия (см);
![]() -площадь поперечного сечения (см2
);
-площадь поперечного сечения (см2
);
![]() -число витков.
-число витков.
Найдем магнитопроницаемость:
![]()
Выбираем типоразмер К ![]() .
.
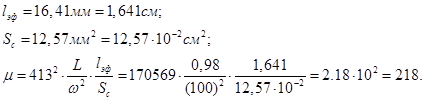
Таким образом, трансформатор представляет собой магнитопровод типоразмера К ![]() , тип феррита никелево-цинковый, с магнитной проницаемостью
, тип феррита никелево-цинковый, с магнитной проницаемостью ![]() , числом витков
, числом витков ![]() ,
, ![]() .
.
3.3 Расчет надежности электрической схемы
Проблема обеспечения надежности связана со всеми этапами создания изделия и всем периодом его практического использования. Надежность изделия закладывается в процессе его конструирования и расчета и обеспечивается в процессе его изготовления путем правильного выбора технологии производства, контроля качества исходных материалов, полуфабрикатов и готовой продукции, контроля режимов и условий изготовления.
Зная элементную базу электрической схемы, можно рассчитать ее надежность.
Работоспособность системы оценивается как произведение вероятностей безотказной работы элементов:
![]() , где
, где
![]() - вероятность безотказной работы i-го элемента.
- вероятность безотказной работы i-го элемента.
Система, как и элемент, может находиться в одном из двух несовместимых состояний: отказа или работоспособности. Следовательно,
![]() , где
, где
![]() - вероятность отказа системы, определяемая по выражению:
- вероятность отказа системы, определяемая по выражению:
![]()
При произвольном законе распределения времени наработки до отказа для каждого из элементов:
 , где
, где
![]() - интенсивность отказов i-го элемента.
- интенсивность отказов i-го элемента.
Вероятность безотказной работы системы соответственно запишется:
По последнему выражению можно определить вероятность безотказной работы системы до первого отказа при любом законе изменения интенсивности отказов каждого из n элементов во времени.
Для наиболее часто применяемого условия ![]() выражение для вероятности безотказной работы системы примет вид:
выражение для вероятности безотказной работы системы примет вид:
 , где
, где
где ![]() можно представить как интенсивность отказов системы, сведенной к эквивалентному элементу с интенсивностью отказов:
можно представить как интенсивность отказов системы, сведенной к эквивалентному элементу с интенсивностью отказов:
![]()
Для нашего случая расчет надежности системы будет производить в расчете на 1 год. В расчете будем использовать номинальные значения интенсивности отказов элементов.
Данные для определения интенсивности отказов приведены в табл.3.
Таблица 3. Определение интенсивности отказов
| №п/п | Наименование элемента | Количество элементов, шт. | Интенсивность отказов в нормальном режиме, |
Интенсивность отказов, |
| 1 | Задающий генератор | 1 | 0,35 | 0,35 |
| 2 | Резистор | 32 | 0,043 | 1,376 |
| 3 | Микросхема | 5 | 0,013 | 0,065 |
| 4 | Транзистор | 4 | 0,84 | 3,36 |
| 5 | Диод | 5 | 0,2 | 1 |
| 6 | Конденсатор | 16 | 0,06 | 0,9 |
![]()
Рассчитываем вероятность безотказной работы в течение заданной наработки (8760 часов).
![]() .
.
Среднее время наработки до отказа равно:
![]()
Таким образом, расчет показал, что надежность схемы довольно высока.
4. Разработка конструкции ультразвукового датчика прибора для измерения кровотока
4.1 Требования к конструкции ультразвукового датчика
Согласно анализу технического задания датчик предназначен для генерирования ультразвуковых колебаний и приема отраженных от исследуемых объектов эхосигналов. Генерация ультразвуковых колебаний и приема эхосигналов в датчике будет осуществляться электроакустическим преобразователем. Благодаря своим достоинствам (большая эффективность, возможность изготовления элементов любой формы и возбуждения различных видов колебаний, широкий частотный диапазон) чаще всего на практике применяют пьезоэлектрические преобразователи.
В нашем случае будет использоваться совещенный пьезоэлектрический преобразователь - генерация ультразвуковых колебаний и приема эхосигналов в датчике осуществляется одной и той же пластиной. Пьезопластина работает на пьезоэлектрическом эффекте, который заключается в том, что под действием механических напряжений на поверхности пластины появляются электрические заряды, величина которых прямо пропорционально зависит от величины деформации пластины.
Для обеспечения возможности сканирования в определенном секторе в датчике используется механизм механического секторного сканирования, в который входят электромотор и механизм преобразования вращательного движения в обратно-поступательное, который соединяется с конструкцией преобразователя. В датчике используется датчик определения положения преобразователя, который определяет координаты положения преобразователя в зависимости от его угла наклона.
Область пространства, в котором колеблется пьезоэлемент, должна быть заполнена звукопрозрачной жидкостью, в которой скорость распространения ультразвуковой волны близка к скорости распространения в мягких тканях, для уменьшения потери энергии ультразвука при излучении в среду. Для защиты от повреждений движущегося пьезоэлемента, к корпусу должен прикрепляться защитный колпачок, сделанный из прочного звукопроницаемого материала.
Для безопасности использования корпус датчика должен быть изготовлен из пластмассы. Так же материал корпуса должен быть достаточно прочным для защиты внутренних элементов при ударах.
Для электромагнитной совместимости датчик необходимо экранировать, для этого внутреннюю сторону корпуса необходимо металлизировать и исключить возможность соединения корпуса с электродом пьезопластины.
Также должны быть выполнены общие требования, предъявляемые к материалам для изготовления медицинских приборов:
1) биологическая совместимость материала и среды, в которой он должен функционировать (отсутствие токсических реакций, аллергии);
2) стабильность функциональных свойств материала;
3) возможность стерилизационной обработки с целью соблюдения правил санитарии без изменения свойств и формы материала или изделия.
4.2 Выбор материала для пьезоэлектрического преобразователя
Так как для данного прибора выбран пьезокерамический преобразователь, то необходимо выбрать материал пьезопластины.
Выбор пьзоматериала в прямых преобразователях зависит от решаемых ультразвуковых задач, поэтому наряду с обычным требованием (максимальность квадрата коэффициента электромеханической связи) необходимо учесть то, что в качестве акустической нагрузки выступает среда с малым характеристическим импедансом. А так как амплитуда принятого сигнала пропорциональна коэффициенту прозрачности границы пьезоэлемент - нагрузка, то предпочтение следует отдавать пьезоматериалам с малым характеристическим импедансом. Также предпочтение следует отдать пьезоматериалам с малой диэлектрической проницаемостью.
Таким образом, в качестве материала для пьезоэлемента можно использовать пьезокерамику ЦТС-19П. Этот материал имеет пониженное значение диэлектрической проницаемости при достаточно высоких значениях коэффициента электромеханической связи. Это приводит к высоким значениям коэффициента gij , характеризующего чувствительность к механическому напряжению. Этой величине пропорциональна чувствительность холостого хода приёмного преобразователя акустических сигналов. Необходимо отметить высокую температуру Кюри пьезокерамики ЦТС-19П, обеспечивающую широкий интервал рабочих температур, а также высокую временную стабильность. Таким образом, пьезокерамика ЦТС-19П является высокочувствительной, обладает большими пьезомодулями, высокой прочностью и стабильностью свойств, имеет относительно высокую точку Кюри.
При работе пластинчатых преобразователей, как в режиме излучения, так и режиме приема используются колебания плоской поверхности пластины, соприкасающейся со средой, в направлении своей нормали.
Пьезоэлектрическая пластинка с электродами на больших гранях, размеры которых велики по сравнению с ее толщиной, при приложении электрического напряжения будет совершать продольные колебания по толщине.
Пластинчатую систему, совершающую продольные колебания, рассчитывают по формулам для полуволнового стержня.
4.3 Расчет основных параметров пьезоэлектрического преобразователя
4.3.1 Исходные данные для расчетов
Для расчета основных параметров пьезоэлектрического преобразователя приведем основные параметры пьезокерамики ЦТС-19:
скорость звука ![]() - 3120 м/с;
- 3120 м/с;
добротность Qк - 50;
толщинный коэффициент электромеханической связи Kt - 0,54;
пьезомодуль d33 - 100×1012 Кл/Н;
упругий модуль ![]() Н/м2
;
Н/м2
;
диэлектрическая проницаемость ![]() 1060;
1060;
тангенс угла диэлектрических потерь tg![]() - 0,02;
- 0,02;
плотность р - 6000 кг/м3 .
Измерительный преобразователь будет работать на частоте 2МГц.
4.3.2 Расчет геометрических параметров преобразователя
Определим ширину характеристики направленности преобразователя на уровне 0,707 (ширина главного максимума).
В соответствии с ТЗ глубина проникновения ![]() ; поперечная разрешающая способность
; поперечная разрешающая способность ![]() ; продольная разрешающая способность
; продольная разрешающая способность ![]() . Таким образом:
. Таким образом:
![]()
![]()
Найдем длину волны в пьезопластине:
![]()
Теперь можно найти размеры пластинчатого преобразователя (w и l):
![]() м;
м;
![]() м.
м.
Для излучения волн длиной 0,77 мм толщина пластины должна быть равна:
![]()
Зная геометрические размеры преобразователя, определим площадь излучающей поверхности:
![]()
Угол расхождения ультразвукового пучка в дальней зоне зависит от диаметра и длины волны и может быть определён из выражения:
![]() ;
;
γ = 1.47º.
Данный угол удовлетворяет нашему техническому заданию (ширина характеристики направленности при поперечном пьезоэффекте равна 1,528º).
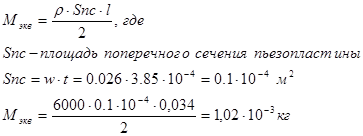
Найдем массу пьезопластины:
![]()
Для обеспечения продольной разрешающей способности необходимо изменять длительность зондирующего импульса. Так для обеспечения ![]() =1,5мм, длительность импульса должна быть:
=1,5мм, длительность импульса должна быть:
![]() с
с
Антирезонансная частота определяется из выражения:
![]() ,
,
где ![]() - коэффициент электромеханической связи пьезоэлектрической пластины при продольных колебаниях по толщине.
- коэффициент электромеханической связи пьезоэлектрической пластины при продольных колебаниях по толщине.
4.3.3 Расчет энергетических характеристик преобразователя
В соответствии с ГОСТ 26831-86 интенсивность ультразвуковых колебаний применяемых в диагностике не должна превышать 50мВ/см2 .
При такой интенсивности излучения акустическая мощность излучателя будет равна:
![]()
Найдем коэффициент электромеханической трансформации (для поперечного пьезоэффекта):
![]()
Найдем эквивалентную массу:
Сопротивление излучения:
![]()
![]()
Добротность преобразователя:
![]()
Полоса пропускания:
![]()
Электрическое напряжение возбуждения, необходимое для получения заданной удельной акустической мощности при резонансе:

4.4 Описание конструкции ультразвукового датчика
Конструкция ультразвукового датчика приведена в приложении. В корпус преобразователя (1) помещается акустический резонатор, состоящий из пьезопластины, согласующих слоев и демпфера. Акустический резонатор прикрепляется в корпус преобразователя с помощью клея марки ПЭФ-2/10, склеивание происходит при комнатной температуре и давлении при склейке 10-20 кГ/см². Корпус преобразователя удерживается с помощью конструкции, состоящей из кронштейна (2), закрепленного неподвижно к корпусу датчика, и вала (3). Корпус преобразователя свободно качается относительно вала (3). Также к корпусу преобразователя с помощью вала (4) крепится шатун (5), другая сторона которого прикрепляется к кривошипу (6). Кривошипно-шатунный механизм используется для преобразования вращательного движения редуктора (4) в колебательное движение преобразователя с заданным углом. Плечо от оси крепления шатуна до оси, относительно которой происходит колебание преобразователя, определяет угол наклона преобразователя относительно вертикальной оси. Вращательное движение задается шаговым электродвигателем (7) FL28STH, который управляется с помощью котроллера SMSD-30. Контроллер управляется от ЭВМ. С помощью него задается шаг оборота, частота перемещения шагового двигателя. В результате чего устанавливается нужная скорость вращения двигателя, которая зависит от необходимой частоты колебания преобразователя при сканировании. При каждом повороте двигателя на заданный градус изменяется угол наклона преобразователя относительно вертикальной оси, при этом точно определяются координаты его положения. Для обеспечения колебания преобразователя в вертикальной плоскости используется редуктор (8), состоящий из двух конических зубчатых колес, закрепленных под прямым углом. Редуктор преобразует вращательное движение электродвигателя в горизонтальной плоскости во вращательное движение кривошипа в
8-09-2015, 22:51