| (2.22) |
Решение уравнения (2.22) будет иметь вид:
 |
(2.23) |
Определим произвольные постоянные ![]() и
и ![]() , решая систему уравнений:
, решая систему уравнений:
 . . |
(2.24) |
Решение системы (2.24) будет иметь вид:
 , , |
(2.25) |
если учесть (2.20) то:
 |
(2.26) |
подставляя (2.26) в (2.21) и с учетом (2.23) имеем:
|
(2.27) |

где ![]() - реальная часть;
- реальная часть;  - мнимая часть.
- мнимая часть.
Тогда разделяя реальную и мнимую части в (2.27) получим:
 . . |
(2.28) |
Учитывая что:
| (2.29) |
имеем:
 |
(2.30) |
Преобразуя (2.30) получим решение уравнения (2.19):
 |
(2.31) |
Прологарифмируем выражение (2.31) предварительно подставив в него значение допустимой погрешности позиционирования:
 , , |
(2.32) |
где ![]() - допустимая погрешность позиционирования.
- допустимая погрешность позиционирования.
Преобразуя (2.32) получим выражение для определения времени переходного процесса:
 |
(2.33) |
Для расчета жесткости C
и коэффициента демпфирования ![]() в модели используются экспериментально полученные зависимости. В частности коэффициент демпфирования определяется по осциллограмме затухания колебаний рабочего органа.
в модели используются экспериментально полученные зависимости. В частности коэффициент демпфирования определяется по осциллограмме затухания колебаний рабочего органа.
Таким образом, время переходного процесса, для данного типа манипулятора при заданной массе положении рабочего органа определяется по выражению (2.33), в котором коэффициенты жесткости и демпфирования предварительно определены экспериментально.
2.2 Анализ переходных процессов в манипуляторе МРЛ-901П
Источниками возникновения переходных процессов в манипуляторе МРЛ-901П являются: зубчатая ременная передача линейного модуля манипулятора и его свободная консоль.
На этапе зондирующих экспериментов исследовались парные зависимости коэффициента демпфирования от натяжения зубчатого ремня и смещения рабочего органа вдоль консоли. Результаты анализа полученных осциллограмм сведены в таблицы 2.1 и 2.2.
Анализ результатов показывает, что натяжение зубчатого ремня существенным образом влияет на коэффициенты демпфирования модуля линейного перемещения: так при увеличении начального натяжения ремня от минимального значения h = 0,03778 до максимального h = 0,00667 (в исследуемых приделах) коэффициент демпфирования уменьшается в 3 раза. Таким образом, можно сделать вывод о том, что демпфирование линейного модуля с зубчатой ременной передачей может задаваться и варьироваться в широких пределах, как на этапе конструирования, так и в процессе его эксплуатации.
| Табл. 2.1 | ||||||||||
| Результаты анализа осциллограмм собственных колебаний рабочего органа манипулятора МРЛ-901П на консоли | ||||||||||
| Величина смещения рабочего органа вдоль консоли ly , мм | Период колебаний рабочего органа T, с. | Частота колебаний w , с-1 | Логарифмический декремент затухания n | Коэффициент демпфирования b, кг/c | Время затухания колебаний tп.п., с. | |||||
| 0 | 0,057 | 17,54 | 0,956 | 369 | 0,6 | |||||
| 175 | 0,067 | 15 | 0,693 | 227,55 | 0,9 | |||||
| 350 | 0,08 | 12,5 | 0,446 | 122,65 | 1,2 | |||||
Анализ результатов исследований показывает, что смещение рабочего органа манипулятора МРЛ-901П вдоль свободной консоли, также как и увеличение начального натяжения ремня, вызывает уменьшение коэффициентов демпфирования, что существенно (в 2…3 раза) увеличивает время полного затухания собственных колебаний рабочего органа (см. табл. 2.1 и 2.2), и, как следствие снижает реальную производительность.
Смещение рабочего органа относительно основания и увеличение натяжения ремня приводит также к уменьшению частоты собственных колебаний манипулятора, что должно учитываться при использовании его в технологических процессах, связанных с резонансными явлениями.
Комплексные исследования демпфирующих свойств манипулятора осуществлялись с целью установления численной зависимости коэффициента демпфирования от величины начального натяжения ремня и смещения рабочего органа вдоль консоли. В качестве функции отклика выбиралась линейная модель. База данных для построения плана экспериментов сведена в табл. 2.
Основные уровни и интервалы варьирования выбирались на основе результатов зондирующих экспериментов, а также исследований жесткости и точносных параметров манипулятора МРЛ-901П.
| Табл. 2.3 | ||||||||
| База данных для построения плана экспериментов | ||||||||
Наименование фактора |
Условное обозначение | Область определения | Основной уровень | Интервал варьирования | ||||
| Начальное натяжение ремня h | X1 |
0...0,04 |
0,02 |
0,013 |
||||
| Величина смещения рабочего органа манипулятора вдоль консоли ly , мм | X2 |
0...350 |
175 |
175 |
||||
Матрица планирования и результаты экспериментов сведены в табл. 2.4.
Проводилась полная статистическая обработка результатов экспериментов, позволившая получить адекватную модель зависимости коэффициентов демпфирования от исследуемых факторов в виде:
| (2.34) |
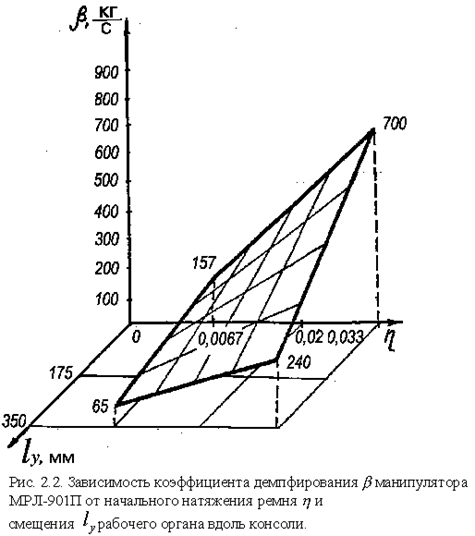
Поверхность отклика представлена на рис. 2.2. Выражение (2.34) позволяет получить численное значение коэффициента демпфирования, необходимое для расчета продолжительности переходного процесса при позиционировании.
| Табл. 2.4 | ||||||||||||||
| Матрица планирования и результатов экспериментов по комплексному исследованию демпфирующих свойств манипулятора МРЛ-901П | ||||||||||||||
Номер опыта |
|
|
|
|
Среднее значение коэффициента демпфирования, кг/c | Дисперсия среднего арифметического | Вычисленное значение | |||||||
| 1 | +1 | +1 | +1 | +1 | 240 | 64 | 240 | |||||||
| 2 | +1 | +1 | -1 | -1 | 700 | 49 | 700 | |||||||
| 3 | +1 | -1 | +1 | -1 | 65 | 4 | 65 | |||||||
| 4 | +1 | -1 | -1 | +1 | 157 | 16 | 157 | |||||||
Экспериментальные исследования времени переходного процесса осуществлялись при помощи комплекта виброизмерительной аппаратуры АВ-44, вибродатчик которой крепился на рабочем органе манипулятора.
2.3 Определение жесткости звеньев манипулятора МРЛ-901П
Жесткость звеньев манипулятора МРЛ-901П определялась по экспериментальным замерам деформации консоли манипулятора при действии на нее определенного усилия.
| Таблица 2.5 | ||||
| Деформация звеньев манипулятора МРЛ-901П под действием возмущающих сил | ||||
Возму- щающая сила |
Деформация звеньев манипуляционной системы d , мм | |||
| Ось X | Ось Y | |||
| Y=0 | ||||
| 0 | 0 | 0 | 0 | 0 |
| 10 | 0,111 | 0,135 | 0,178 | 0,111 |
| 20 | 0,206 | 0,234 | 0,390 | 0,206 |
| 30 | 0,265 | 0,334 | 0,560 | 0,265 |
| 40 | 0,302 | 0,418 | 0,750 | 0,302 |
| 50 | 0,345 | 0,507 | 0,930 | 0,348 |
| 60 | 0,390 | 0,580 | 1,090 | 0,393 |
| 70 | 0,418 | 0,658 | 0,421 | |
| 80 | 0,460 | 0,745 | 0,465 | |
| 90 | 0,498 | 0,825 | 0,505 | |
| 100 | 0,534 | 0,902 | 0,540 | |
Результаты исследования жесткости приведены в таблице 2.5. По этим данным были построены график зависимости деформации от смещения рабочего органа (рис. 2.3) и график зависимости деформации от натяжения зубчатого ремня (рис.2.4).


2.4 Исследование быстроходности манипулятора
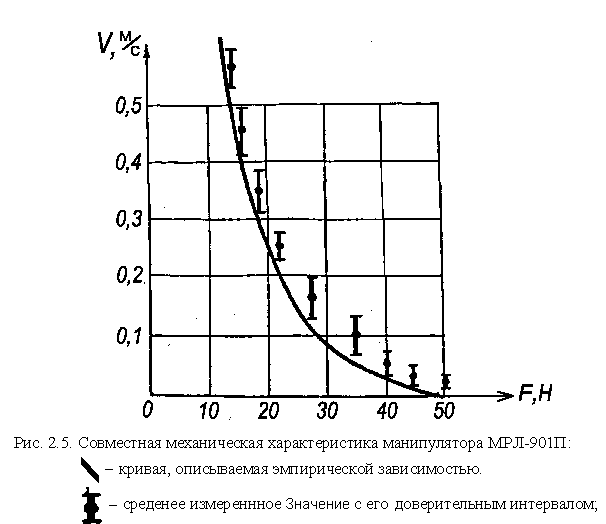
Быстроходность манипулятора характеризуется временем перемещения рабочего органа в требуемую точку. Теоретические предпосылки указывают, что непосредственное влияние на величину этого времени оказывают совместные механические характеристики (СМХ) электроприводов манипулятора.
Иcследование СМХ осуществлялось путем анализа тахограмм движения манипулятора МРЛ-901П, зарегистрированных самописцем Н338Д/1. Статистически обработанные результаты экспериментов сведены в таблицу 2.6 ипредставлены в графическом виде на рис. 2.5.
Анализ экспирементальных данных показывает, что связь силы тяги, а, следовательно, и допустимого ускорения ![]() со значением достигнутой скорости
со значением достигнутой скорости ![]() существенно нелинейна. Для определения квазиоптимальных режимов движения манипулятора необходимо связать параметры a
и V
аналитическим выражением.
существенно нелинейна. Для определения квазиоптимальных режимов движения манипулятора необходимо связать параметры a
и V
аналитическим выражением.
Представим каждое значение ![]() СМХ в виде разности
СМХ в виде разности ![]() , где
, где ![]() - статическая тяговая синхронизирующая сила, а
- статическая тяговая синхронизирующая сила, а ![]() - потери тяговой силы, зависящие от скорости движения манипулятора.
- потери тяговой силы, зависящие от скорости движения манипулятора.
Такая запись СМХ имеет то очевидное приемущество, что для каждого конкретного образца манипулятора указанной модели могут быть введены уточнения формулы путем измерения одного лишь значения ![]() .
.
Следовательно, определение эмпирической формулы CМХ сводится к отысканию зависимости ![]() . Воспользовавшись способом отыскания эмпирических формул, приведенным в [7], легко установить, что экспериментальные точки
. Воспользовавшись способом отыскания эмпирических формул, приведенным в [7], легко установить, что экспериментальные точки ![]() наиболее точно отображают линейную зависиюсть на полулогарифмической функцональной координатной сетке. Из этого следует, что выражение
наиболее точно отображают линейную зависиюсть на полулогарифмической функцональной координатной сетке. Из этого следует, что выражение ![]() может быть описано логарифмической функцией. Из
может быть описано логарифмической функцией. Из
Результаты исследований совместной механической характеристики манипулятора МРЛ-901П.
| Таблица 2.6 | ||||||
Масса |
Число |
Численное значение синхронной скорости, м/c |
||||
| груза |
паралельных опытов | среднее арифметическое |
среднее квадратическое откланение | принимаемое значение |
||
| 2 | 10 | 0,80 | 0,013 | 0,8±0,04 | ||
| 3 | 10 | 0,74 | 0,017 | 0,74±0,05 | ||
| 4 | 10 | 0,67 | 0,016 | 0,67±0,05 | ||
| 5 | 10 | 0,59 | 0,007 | 0,59±0,02 | ||
| 6 | 10 | 0,49 | 0,013 | 0,49±0,04 | ||
| 7 | 10 | 0,38 | 0,012 | 0,38±0,04 | ||
| 8 | 10 | 0,29 | 0,010 | 0,29±0,03 | ||
| 9 | 10 | 0,24 | 0,013 | 0,24±0,04 | ||
| 10 | 10 | 0,20 | 0,011 | 0,20±0,03 | ||
| 11 | 10 | 0,16 | 0,013 | 0,16±0,04 | ||
| 12 | 10 | 0,12 | 0,006 | 0,12±0,02 | ||
| 13 | 10 | 0,05 | 0,003 | 0,05±0,01 | ||
линейной зависимости, представленной на рис. 2.6 легко отыскать коэффициенты ее уравнения, вид которого ![]() . В итоге имеем:
. В итоге имеем:
| (2.35) |
где: V
измеряется в ![]() .
.
Следует, однако, заметить, что при нарастании значения экспериментальные точки ![]() несколько удаляются от прямой, описанной уравнением (2.35). Поэтому, с целью уточнения зависимости была внесена поправка, с учетом которой эмпирическая формула СМХ примет вид:
несколько удаляются от прямой, описанной уравнением (2.35). Поэтому, с целью уточнения зависимости была внесена поправка, с учетом которой эмпирическая формула СМХ примет вид:
| (2.36) |
где: V
-
измеряется в ![]() ; а
; а ![]() - в [Н], или
- в [Н], или
(2.37) |
где: ![]() ,
,![]() -допустимые мгновенные значения ускорения и скорости соответственно (при этом лежит в интервале от 0,1
-допустимые мгновенные значения ускорения и скорости соответственно (при этом лежит в интервале от 0,1![]() до 0,8
до 0,8 ![]() ).
).

2.5 Методика проведения эксперимента по определению механических характеристик манипулятора МРЛ-901П
Для исследования СМХ манипулятора портального типа МРЛ-901П наиболее удобной является следующая методика измерений.

На свободный конец вала электродвигателя ШД 5Д1МУ3 крепился тахогенератор, электрический выход которого связан с измерительной схемой (рис. 2.7) вольтметра. Схема тарировалась путем задания устройством управления 2Р22 постоянных значений скорости движения рабочего органа манипулятора. При этом электродвигатель был полностью разгружен от момента нагрузки.
После тарировки к рабочему органу манипулятора прикреплялась перекинутая через ролик гибкая стальная нить, на свободный конец которой подвешивался переменный груз ![]() . По команде системы управления электродвигатель начинал равноускоренно вращаться, перемещая при этом рабочий орган манипулятора и преодолевая противодействие груза
. По команде системы управления электродвигатель начинал равноускоренно вращаться, перемещая при этом рабочий орган манипулятора и преодолевая противодействие груза ![]() . Дойдя до определенного значения скорости
. Дойдя до определенного значения скорости ![]() двигатель выходил из синхронизма, что отмечалось на фиксируемой самописцем тахограмме резким падением уровня сигнала.
двигатель выходил из синхронизма, что отмечалось на фиксируемой самописцем тахограмме резким падением уровня сигнала.
Изменение массы ![]() груза приводило к выходу электродвигателя из синхронизма уже при другом значении достигнутой скорости
груза приводило к выходу электродвигателя из синхронизма уже при другом значении достигнутой скорости ![]() . Таким образом, были найдены соотношения веса противодействующего груза и критической синхронной скорости ШД во всем диапазоне его работы.
. Таким образом, были найдены соотношения веса противодействующего груза и критической синхронной скорости ШД во всем диапазоне его работы.
Для уменьшения влияния инерционности системы задавалось ![]() , что позволило с точностью 5 - 7% полагать, что вся сила
, что позволило с точностью 5 - 7% полагать, что вся сила ![]() в момент выхода ШД из синхронизма расходуется на удержание груза
в момент выхода ШД из синхронизма расходуется на удержание груза ![]() , т. е.
, т. е. ![]() .
.
СМХ манипулятора определялась последовательно, для каждой программируемой координаты.
Для исследования других динамических характеристик, определяющих производительность манипулятора, необходимо вернуться к рассмотренному выше переходному процессу при позиционировании манипулятора.
В уравнение движения манипулятора (см. раздел 2.1) в качестве постоянных величин входят коэффициенты, пропорциональные скорости перемещения рабочего органа - коэффициенты демпфирования.
Коэффициент демпфирования b может быть определен по осциллограмме затухания колебаний рабочего органа манипулятора с использованием расчетной формулы:
| (2.38) |
где m - масса подвижной части манипулятора;
u - логарифмический декремент затухания колебательного движения;
Т - период колебаний.
2.6 Сравнение результатов расчета модели с экспериментальными данными
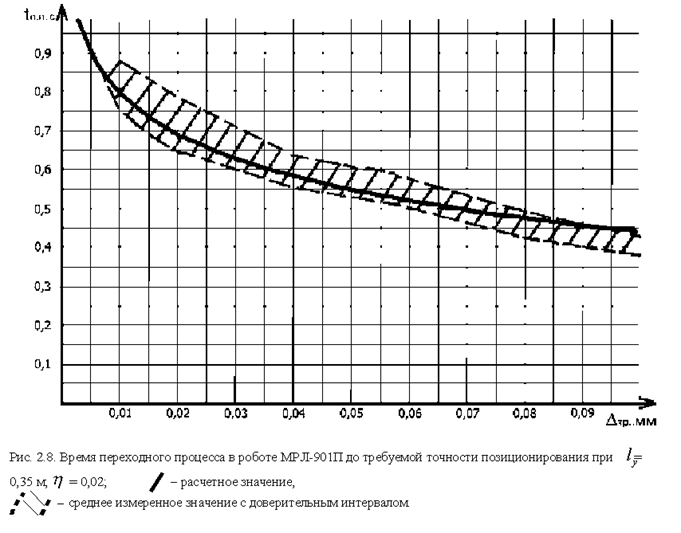
Результаты исследования жесткости и демпфирующих свойств манипулятора использовались для расчета времени переходного процесса при позиционировании. Расчет производился из аналитических выражений, полученных в разделе 2. 1 настоящей работы; его результаты сравнивались с экспериментальными данными (рис. 2.8).
Из графика видно, что расчетная кривая лежит в области экспериментально измеренных значений, это свидетельствует о достаточной точности модели, что позволяет использовать ее на практике.
3. Оптимизация скорости перемещения рабочего органа манипулятора
3.1 Время перемещения рабочего органа манипулятора

Траектория движения рабочего органа манипулятора состоит из участков разгона и торможения, а также участка, где перемещение происходит с постоянной скоростью. Очевидно, что минимальное время перемещения будет достигнуто при максимально возможных значениях скорости и ускорения, определяемых из совместной механической характеристики манипулятора (см. раздел 2.4). Заметим также, что время перемещения зависит от скорости в момент выхода на конечную точку ![]() (см. рис. 3.1). При увеличении этой скорости, протяженность участка
(см. рис. 3.1). При увеличении этой скорости, протяженность участка ![]() уменьшается, а протяженность участка
уменьшается, а протяженность участка ![]() увеличивается, тем самым возрастает средняя скорость движения рабочего органа, но при этом увеличивается время переходного процесса в момент останова. Таким образом для достижения минимального времени перемещения с учетом переходного процесса необходимо определить оптимальное значение скорости выхода на конечную точку
увеличивается, тем самым возрастает средняя скорость движения рабочего органа, но при этом увеличивается время переходного процесса в момент останова. Таким образом для достижения минимального времени перемещения с учетом переходного процесса необходимо определить оптимальное значение скорости выхода на конечную точку ![]() .
.
Время перемещения зависит от максимальных значений скорости и ускорения рабочего органа, а также от скорости в момент выхода на конечную точку рабочего органа манипулятора и складывается из следующих значений:
| (3.1) |
где ![]() – время перемещения рабочего органа;
– время перемещения рабочего органа; ![]()
![]()
![]() – время перемещения рабочего органа на первом, втором и третьем участке траектории соответственно (см. рис 3.1);
– время перемещения рабочего органа на первом, втором и третьем участке траектории соответственно (см. рис 3.1); ![]() – время переходного процесса.
– время переходного процесса.
Время перемещения на первом участке траектории определяется из значений максимальной скорости и ускорения:
 , , |
(3.2) |
где ![]() – максимальная скорость перемещения рабочего органа манипулятора;
– максимальная скорость перемещения рабочего органа манипулятора; ![]() – максимальное ускорение рабочего органа манипулятора.
– максимальное ускорение рабочего органа манипулятора.
На втором участке траектории рабочий орган перемещается равномерно с максимальной скоростью, при этом время перемещения составит:
 , , |
(3.3) |
где S
– расстояние между двумя конечными точками:![]() ;
;
Время перемещения на третьем участке траектории:
 , , |
(3.4) |
где ![]() – скорость рабочего органа манипулятора в момент выхода на конечную точку.
– скорость рабочего органа манипулятора в момент выхода на конечную точку.
Длина первого участка определяется скоростью ![]() , которая достигается в конце этого участка, ускорением
, которая достигается в конце этого участка, ускорением ![]() , и выражается как:
, и выражается как:
 . . |
(3.6) |
Длина третьего участка определяется начальной скоростью этого участка – ![]() , ускорением
, ускорением ![]() и конечной скоростью
и конечной скоростью ![]() :
:
 . . |
(3.8) |
Для определения времени перемещения на втором участке подставим (3.6) и (3.8) в (3.3):
 . . |
(3.9) |
Общее время перемещения с учетом переходного процесса получим подставляя (3.2), (3.4), (3.9) и (2.33) в (3.1):
 . . |
(3.10) |
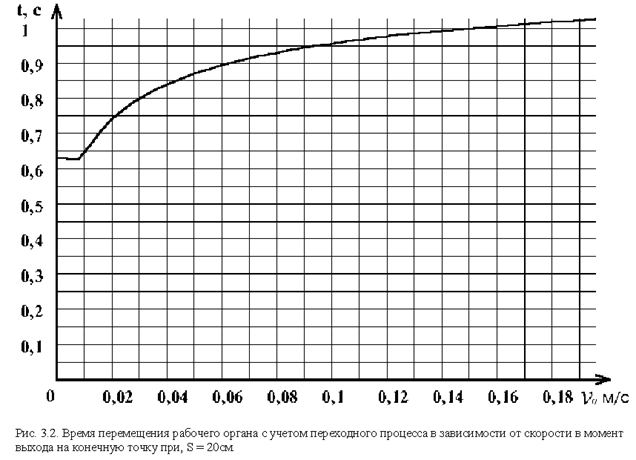
Анализируя выражение (3.10) относительно скорости выхода на конечную точку ![]() , получаем график времени перемещения рабочего органа манипулятора с учетом переходного процесса (см. рис.3.2). Из графика видно, что переходный процесс значительно влияет на время перемещения рабочего органа манипулятора.
, получаем график времени перемещения рабочего органа манипулятора с учетом переходного процесса (см. рис.3.2). Из графика видно, что переходный процесс значительно влияет на время перемещения рабочего органа манипулятора.
3.2 Время перемещения рабочего органа манипулятора при малых расстояниях между рабочими точками

Часто возникают случаи, когда расстояние между двумя рабочими точками мало и рабочий орган манипулятора не успевает набрать максимально возможную скорость. При этом траектория движения состоит только из двух участков – разгона и торможения (см. рис. 3.3.). Скорость рабочего органа на участке разгона достигает некоторого значения ![]() , длина этого участка составит:
, длина этого участка составит:
 , , |
(3.11) |
где ![]() – максимальная скорость которую успевает набрать рабочий орган манипулятора;
– максимальная скорость которую успевает набрать рабочий орган манипулятора; ![]() – максимальное ускорение рабочего органа манипулятора.
– максимальное ускорение рабочего органа манипулятора.
На втором участке траектории необходимо производить торможение рабочего органа в связи с тем что по достижению конечной точки его скорость должна иметь значение ![]() , при этом длина второго участка составит:
, при этом длина второго участка составит:
 , , |
(3.12) |
тогда складывая выражения (3.11) и (3.12) получим суммарное перемещение рабочего органа:
 . . |
(3.13) |
Зная расстояние между двумя рабочими точками, из (3.13) получим выражение для определения максимально достигнутой скорости:
 . . |
(3.14) |
Используя (3.14) определим время перемещения рабочего органа на первом:
 , , |
(3.15) |
и втором участке:
 . . |
(3.16) |
Суммируя выражения (3.15), (3.16) и (2.33) получим выражение для определения времени перемещения с учетом переходного процесса при условии, что рабочий орган не успевает набрать максимальную скорость:
 |
(3.17) |
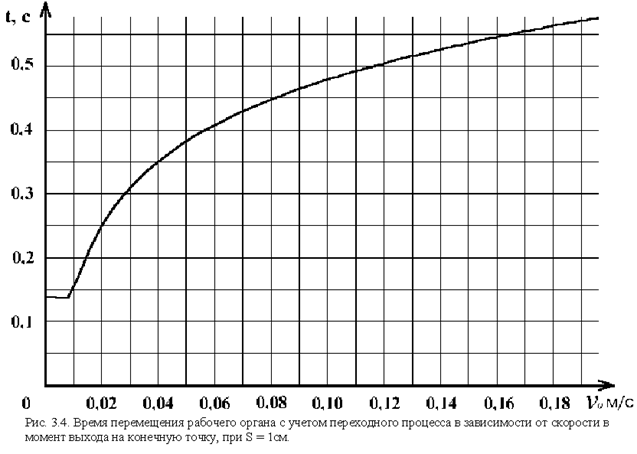
Анализируя выражение (3.17) относительно скорости выхода на конечную точку ![]() , получаем график времени перемещения рабочего органа манипулятора с учетом переходного процесса (см. рис.3.4) для малых перемещений рабочего органа.
, получаем график времени перемещения рабочего органа манипулятора с учетом переходного процесса (см. рис.3.4) для малых перемещений рабочего органа.
3.3 Получение оптимальной скорости в момент выхода на конечную точку
Анализ выражений (3.10) и (3.17) показывает (см. рис. 3.2, 3.4), что время перемещения рабочего органа будет минимально при таком значении скорости ![]() , когда переходный процесс в системе отсутствуют, то есть максимальная амплитуда колебаний не превышает допустимой погрешности позиционирования
, когда переходный процесс в системе отсутствуют, то есть максимальная амплитуда колебаний не превышает допустимой погрешности позиционирования ![]() . Для определения скорости
. Для определения скорости ![]() , достаточно прировнять к нулю выражение (2.33):
, достаточно прировнять к нулю выражение (2.33):
 . . |
(3.18) |
Решение (3.18) относительно ![]() имеет вид:
имеет вид:
 . . |
(3.19) |
Выражение (3.19) определяет такое значение скорости в момент выхода на
29-04-2015, 01:59