Для определения устойчивости системы строим амплитудно-частотную, фазо-частотную характеристики в логарифмическом масштабе и по замкнутой системе строим годограф.
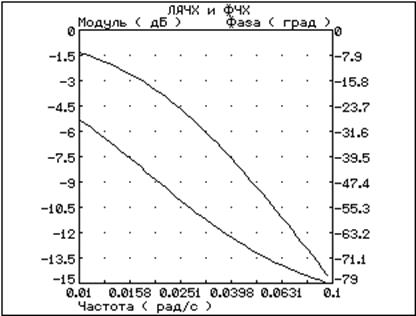
Рис 8. ЛАХЧ и ЛФЧХ при статическом регулировании.
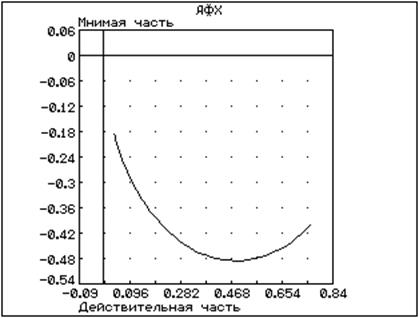
Рис 9. Амплитудно-фазовая характеристика замкнутой системы.
По графикам видим, что при коэффициенте регулятора Кр =10 запас устойчивости выполняется, т.к. на частоте среза wср фаза меньше 180°, что характеризует устойчивость системы при статическом регулировании, значит возможно использование П-регулятора для САР температуры.
2.1.2. Оценка возможности астатического регулирования.
Одним из признаков астатического звена (или системы в целом) является наличие комплексного переменного Р в качестве множителя в знаменателе передаточной функции, т.е. наличие интегрирующей составляющей.
Рассмотрим возможность ПИ-закона регулирования САР температуры. Для этого построим структурную схему, в которую включим ПИ-регулятор.

Рис 10. Структурная схема САР температуры.
Передаточная функция ПИ-регулятора имеет вид
WP (р)=К+1/Тр ; (К=20; Ти =25 сек.)
Найдем передаточную функцию разомкнутой системы
Wраз (р)=Wр (р)Wоб (р)

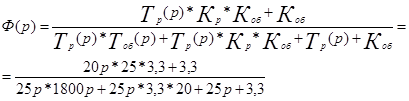
Найдем передаточную функцию замкнутой системы
![]()
По передаточной функции разомкнутой системы строим ЛАЧХ и ЛФЧХ, а по функции замкнутой системы строим АФХ.
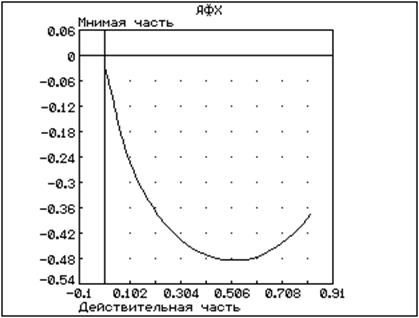
Рис 11. Амплитудно-фазовая характеристика замкнутой системы.
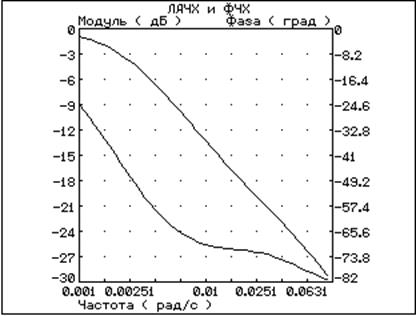
Рис 12. ЛАЧХ и ЛФЧХ при астатическом регулировании.
Частотные характеристики показывают, что система имеет запас устойчивости, как по амплитуде, так и по фазе, т.к. на частоте среза wср фаза < 180° значит возможно использовать ПИ регулятор для САР температуры.
2.1.3. Исследование качества одноконтурной САР.
К автоматическим системам регулирования предъявляются требования не только в отношении ее устойчивости. Для работоспособности системы не менее необходимо, что бы процесс автоматического регулирования при определенных качественных показателей.
Требования к качеству процесса регулирования в каждом случае могут быть самыми разнообразными, однако из всех качественных показателей можно выделить несколько наиболее существенных, которые с достаточной полнотой определяют качество почти всех АСР.
Качество процесса регулирования системы, как правило, оценивают по ее переходной функции.
Основными показателями качества является: - время регулирования tр – называется время, в течении которого, начиная с момента приложения воздействия на систему отклонения регулируемой величины Dh(t) от ее установившегося значения h0 =h(¥) будут меньше на пред заданной величины Е. Обычно принимают, что по истечении времени регулирования отклонении регулируемой величины от установившегося значения должно быть не более Е=5%. Таким образом, время регулирования определяет длительность (быстродействие) переходного процесса.
- перерегулированием s называется максимальное отклонение Dhmax регулируемой величины от установившегося значения, выраженное в процентах от h0 =h(¥).
Абсолютная величина Dhmax определяется из кривой переходного процесса:
Dhmax =hmax - h(¥)
Соответственно перерегулирование будет равно:
- Колебательность системы характеризуется числом колебаний регулируемой величины за время регулирования tр . Если за это время переходный процесс в системе совершает число колебаний меньше заданного, то считается, что система имеет требуемые качеством регулирования в части ее колебательности;
- Установившаяся ошибка Е. Установившееся значение регулируемой величины h0 в окончании переходного процесса зависит от астатизма n системы. В статических системах (n=0) – установившаяся ошибка при постоянной величине входного воздействия не равна 0 и следовательно, установившееся значение регулируемой величины h0 будет отличаться от ее заданного значения на величину установившейся ошибки.
По каналу возмущающего воздействия величина ошибки определяется выражением
![]()
где x0 -постоянное задающее воздействие; К – коэффициент передачи системы.
По каналу возмущающего воздействия величина ошибки согласно выражения
где f0 – постоянное возмущающее воздействие; Коб – коэффициент передачи объекта регулирования; Кр – коэффициент передачи регулятора.
Сравнивая переходные функции статического и астатического регулирования, выбираем оптимальный регулятор для САР температуры.

Рис 13. Переходная функция САР с П-регулятором

Рис 14. Переходная функция САР с ПИ-регулятором
По графикам видно, что время регулирования с ПИ-регулятором меньше, чем с П-регулятором; значит для САР температуры целесообразно применить импульсный регулятор выполняющий ПИ-закон регулирования.
Для расчетов использовали на компьютере программу «Classic».
3. Разработка схемы контура регулирования заданным параметром.
Схемы выполнены по ГОСТ 2.710-81.
Рис 15. Контур трехпозиционного регулирования.
Подача питания на лабораторный стенд производится автоматом питания SF1 схема №003Э3. При этом включается нагревательный элемент объекта управления через размыкающий контакт КМ 1.1. реле КМ 1, и вторичный показывающий самопишущий прибор КСУ 4. В положении 90° универсального переключателя SA1 электродвигатель вентилятора. В положении -45°, переключателя SA1, включается в позиционное регулирование, в положении +45° - трехпозиционное регулирование.
При 2-х позиционном регулировании через размыкающий контакт датчика ТУДЭ1 включена обмотка реле КМ1. При превышении установленной температуры на датчике, его контакт размыкается и размыкает контакт КМ1.1, выключая при этом нагревательный элемент, о чем оповещает сигнальная лампа HL4.
Трехпозиционное регулирование показано на схеме №004Э2. В автоматическом режиме электрический сигнал от термопреобразователе ТСМУ последовательно поступает сначала на вход прибора КСУ4(2) зажим 12 и через зажим 11 поступает на вход 25 регулирующего блока РБИ 1-П.
На вход РБИ 1-П зажим 21 от задатчика РЗД подается также токовый сигнал, пропорциональный заданному значению температуры.
На выходе регулятора, зажимами 7 и 9 выдается сигнал «Меньше» и «Больше» соответственно, относительно средней точки зажима 10. Сигнал проходит через БРУ и размыкающие контакты SQ1 и SQ2 исполнительного механизма ИМ, которые управляют пускателем ПБР зажимы 7 и 9. ПБР включает ИМ контактами 1, 2 и 3.
В ручном режиме управления ИМ проходит кнопками БРУ «Больше» или «Меньше».
Заключение
Для рассчитываемой системы объекта произведены следующие расчеты:
Разработка функциональной схемы автоматического регулирования. Получена передаточная функция и структурное преобразование схемы объекта управления. Построены частотные характеристики объекта управления. Произведена оценка возможностей статического объекта регулирования (П-регулятор), а также оценка возможности астатического объекта регулирования (ПИ-регулятор). Произведено исследование качества одноконтурной системы автоматического регулирования.
Выполнено построение желаемых частотных характеристик скорректированной системы. Выполнен выбор и расчёт корректирующего устройства. Произведена оценка качества скорректированной системы.
Выполнена разработка схемы контура регулирования заданным параметром.
На основании проведенных расчетов можно сказать, что подбор корректирующего устройства произведен, верно, и отвечает показателям качества системы с произведенной коррекцией.
Список используемой литературы.
- И.Ю. Топчев «Атлас для проектирования CAP»
- B.C. Чистяков «Краткий справочник по теплотехническим измерениям»
- Н.Н.Иващенко «Автоматическое регулирование»
4. В.В. Черенков «Промышленные приборы и средства автоматизации»
29-04-2015, 02:00