45 S = 0.000 S1 = -0.000 S2 = 0.000 V = -0.000 A = 0.000 FI = 220
46 S = 0.000 S1 = 0.000 S2 = 0.000 V = 0.000 A = 0.000 FI = 360
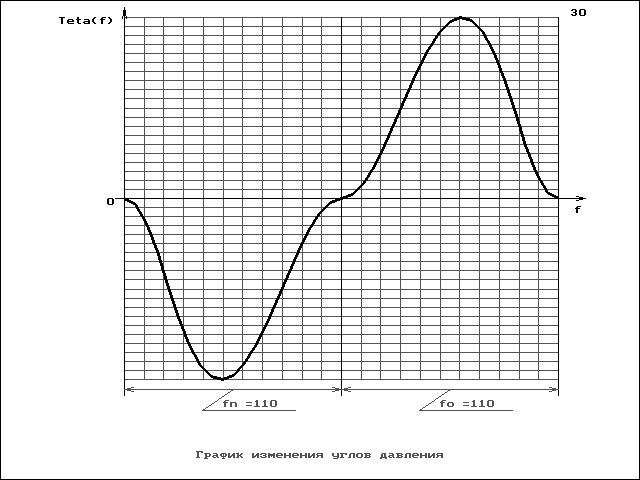
F1 = 110 F2 = 0 F3 = 110
H = 38.000
E = 0 Rmin = 52.000 TETAM = 30.000
R[1] = 52.000 B[1] = 0.000 TETA[1] = -0.0
R[2] = 52.031 B[2] = 5.500 TETA[2] = -1.1
R[3] = 52.245 B[3] = 11.000 TETA[3] = -4.1
R[4] = 52.807 B[4] = 16.500 TETA[4] = -8.8
R[5] = 53.848 B[5] = 22.000 TETA[5] = -14.3
R[6] = 55.452 B[6] = 27.500 TETA[6] = -19.6
R[7] = 57.648 B[7] = 33.000 TETA[7] = -24.2
R[8] = 60.407 B[8] = 38.500 TETA[8] = -27.5
R[9] = 63.645 B[9] = 44.000 TETA[9] = -29.4
R[10] = 67.231 B[10] = 49.500 TETA[10] = -29.9
R[11] = 71.000 B[11] = 55.000 TETA[11] = -29.1
R[12] = 74.769 B[12] = 60.500 TETA[12] = -27.3
R[13] = 78.355 B[13] = 66.000 TETA[13] = -24.6
R[14] = 81.593 B[14] = 71.500 TETA[14] = -21.1
R[15] = 84.352 B[15] = 77.000 TETA[15] = -17.1
R[16] = 86.548 B[16] = 82.500 TETA[16] = -12.9
R[17] = 88.152 B[17] = 88.000 TETA[17] = -8.8
R[18] = 89.193 B[18] = 93.500 TETA[18] = -5.2
R[19] = 89.755 B[19] = 99.000 TETA[19] = -2.4
R[20] = 89.969 B[20] = 104.500 TETA[20] = -0.6
R[21] = 90.000 B[21] = 110.000 TETA[21] = -0.0
R[22] = 90.000 B[22] = 110.000 TETA[22] = -0.0
R[23] = 90.000 B[23] = 110.000 TETA[23] = 0.0
R[24] = 90.000 B[24] = 110.000 TETA[24] = 0.0
R[25] = 89.969 B[25] = 115.500 TETA[25] = 0.6
R[26] = 89.755 B[26] = 121.000 TETA[26] = 2.4
R[27] = 89.193 B[27] = 126.500 TETA[27] = 5.2
R[28] = 88.152 B[28] = 132.000 TETA[28] = 8.8
R[29] = 86.548 B[29] = 137.500 TETA[29] = 12.9
R[30] = 84.352 B[30] = 143.000 TETA[30] = 17.1
R[31] = 81.593 B[31] = 148.500 TETA[31] = 21.1
R[32] = 78.355 B[32] = 154.000 TETA[32] = 24.6
R[33] = 74.769 B[33] = 159.500 TETA[33] = 27.3
R[34] = 71.000 B[34] = 165.000 TETA[34] = 29.1
R[35] = 67.231 B[35] = 170.500 TETA[35] = 29.9
R[36] = 63.645 B[36] = 176.000 TETA[36] = 29.4
R[37] = 60.407 B[37] = 181.500 TETA[37] = 27.5
R[38] = 57.648 B[38] = 187.000 TETA[38] = 24.2
R[39] = 55.452 B[39] = 192.500 TETA[39] = 19.6
R[40] = 53.848 B[40] = 198.000 TETA[40] = 14.3
R[41] = 52.807 B[41] = 203.500 TETA[41] = 8.8
R[42] = 52.245 B[42] = 209.000 TETA[42] = 4.1
R[43] = 52.031 B[43] = 214.500 TETA[43] = 1.1
R[44] = 52.000 B[44] = 220.000 TETA[44] = 0.0
R[45] = 52.000 B[45] = 220.000 TETA[45] = 0.0
R[46] = 52.000 B[46] = 360.000 TETA[46] = 0.0


6. Силовое исследование рычажного механизма.
6.1 Задачи силового исследования.
При силовом исследовании решаются следующие задачи
Определение сил действующих на звенья механизма.
Определение реакций в кинематических парах.
Определение уравновешивающего момента или силы действующей на ведущее звено.
6.2. Построение плана скоростей.
1). Определение VA1,2.

Задаемся масштабом:
Ра1=50 мм,
тогда

2). Определение
 .
.
29-04-2015, 04:05